


|
|
|
|
Главная страница » Электрика в театре » Автоматические релейные системы 1 ... 4 5 6 7 8 9 10 ... 57 причем сумма кратностей полюсов равна степени знаменателя Q{p) передаточной функции W{p), т. е. то импульсная характеристика определяется более сложной формулой: v=o u?=o P p=Pv fi (2.41) Предположим теперь, что входной величиной линейной части системы является скачкообразная функция (см. рис. 2.5, б) (1 при >0, W-() = {o при .<0. (2-42) Реакцию линейной части системы на воздействие вида скачкообразной функции будем называть переходной характеристикой. Изображение скачкообразной функции равно Yip) = L{l{f)} = j. (2.43) Следовательно, из (2.31) находим изображение переходной характеристики Z{p)==Hip)=. (2.44) Обозначим переходную характеристику через h{t). Поскольку деление на р в области изображений соответствует интегрированию в области оригиналов, то из (2.41) получаем / W .-S .V iiel ,2.45) О v=o м,=0 v=0 х=0 где для краткости обозначено Если полюсы W (р) простые и отличные от нуля, то s = п, Го = г,= ... =г„=1, fx = 0, и из (2.45) и (2.46) получаем Л(0 = Соо+]с„оеЧ (2.47) где Р{0) Р (ру) , Если W{p) имеет все простые полюсы и один из них равен нулю, т. е. S = п - 1, Го = 2, /-, == /-2 = ... = = 1, то из (2.45) и (2.46) следует: h (t) = Coo + Cot + S ce -, (2.49) где Coo - P{p) dp L Q (P) P(0) Q(0) в тех случаях, когда W{p) представляет собой отношение трансцендентных функций, формулы разложения при некоторых ограничениях сохраняют свой вид, но число полюсов становится равным бесконечности. 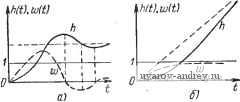 Рнс. 2.6. Примерный вид временных характеристик: а) -устойчивая, б) -нейтральная линейная часть. Сплошные кривые соответствуют переходным характеристикам, а жирные пунктирные линии-нмпул сным характеристикам. Переходная характеристика является функцией времени и вид ее может быть самым разнообразным в зависимости от параметров и структуры линейной части системы. На рис. 2.6, g и б изображен примерный вид временных характеристик для устойчивой (а) и нейтральной (б) линейных частей системы. Импульсные характеристики представляют собой производные переходных характеристик. Они изображены жирными пунктирными линиями на рис. 2.6, а и б. Частотные характеристики. Предположим теперь, что ко входу линейной части системы приложено гармоническое воздействие (рис. 2.5,б), которое мы будем обозначать через y{t), y{t) = y{t)y cosiat + ), (2.51) где ут, ш и г]) - амплитуда, частота и фаза и которое представляет собой вещественную часть более общего воздействия, записанного в комплексной форме: Здесь г/(О == Уте' Ут< (2.52) (2.53) - величина, определяющая амплитуду и фазу гармонического воздействия, называемая комплексной амплитудой. Так как изображение y{t) равно y{p)-L{y{t)}=j, . (2.54) то изображение выходной величины Z(p) найдется умножением Y{p) на передаточную функцию W{p), т.е. Z{p) = W{p)j- (2.55) .Кроме полюсов передаточной функции W{p), изображение Z{p) имеет еще один полюс, р = /ы. Воспользовавшись общей формулой разложения*), выходную величину в этом случае можно представить в виде z{t) = W(;ш)е' +ут е'\ (2.56) v=0 ц=0 где l--{p-.pj . (2.57) 1 d V (Av-H-l)I dp-v-- LQ(p)(p-/cu) Выражение (2.56) состоит из двух составляющих. Первая составляющая представляет собой периодическую функцию времени и характеризует вынужденный процесс в линейной части системы. Обозначим этот. периодический или в данном случае гармонический процесс через z{t). Вторая составляющая выражения (2.56) характеризует переходный процесс в линейной части системы. Характер этого переходного процесса зависит от полюсов pv передаточной функции W{p). Если эти полюсы pv имеют отрицательные вещественные части, то вторая составляющая выражения (2.56) с ростом веремени t стремится к нулю, и в системе будет существовать вынужденный или, в данном случае, установившийся процесс () = W7(/co)Le , (2.58) или, принимая во внимание (2.52), t{t) = W{{t)- (2.59) Величина 1(/ш), связывающая гармонически изменяющуюся входную величину y{t) с установившейся, также гармонически *) См. Приложение I. изменяющейся, выходной величиной z(t), называется частотной характеристикой. Сопоставляя передаточную функцию W{p) с частотной характеристикой К^(/сй), замечаем, что последнюю можно рассматривать как частный случай передаточной функции при р - /ш. Таким образом, для получения частотной характеристики следует в передаточной функции W{p) заменить р на /ш. Для пояснения физического смысла частотной хаарктеристики представим ее в показательной форме: й7(/(о) = И7о(©)е'б( , (2.60) где К^о (с) - модуль, а е(ш)-фаза. Тогда выходную величину линейной части системы в установившемся режиме можно согласно (2.58), (2.59) и (2.53) представить в виде г it) - Го (со) yei м+Ф). (2.61) Отсюда следует, что частотная характеристика показывает, как изменяются амплитуда Wo(a)ym. и фаза е(ш) + г]) выходной величины линейной части системы при изменении частоты входной величины. В вещественной форме выражение для установившейся выходной величины линейной части можно представить в виде g(0 = Wo(M)t/cos(©/-f е(со) + г1)). (2.62) Отсюда вытекает известное правило определения установившегося режима при гармоническом воздействии. Для определения установившегося режима при гармоническом воздействии необходимо амплитуду последнего ут умножить на Wo (о), а к сдвигу фаз г]; прибавить е(ш), где ш -частота внешнего воздействия. Зависимость Wo{a) от ш называется обычно амплитудно-частотной характеристикой, а зависимость е(ш) от © - фазо-частотной характеристикой. Для целей дальнейшего исследования удобным оказывается представление частотной характеристики в виде суммы вещественной и мнимой частей W (/со) = {/(©) + jV (со). (2.63) Воспользовавшись известным равенством g/e cos е (со) + / sin 6 (со), нетрудно из (2.60) найти выражение для вещественной и мнимой частей: C/(cu) = iro(to)cose(ai), F (со) = Wo (а) sine (а). (2.64) Задаваясь различными значениями со, можно построить амплитудно-частотную и фазо-частотную характеристики (рис. 2.7, й) либо вещественную и мнимую части (рис. 2.7,6) частотной характеристики. Часто эти характеристики совмещают и изображают частотную характеристику W(/co) в комплексной плоскости {U, jV), или, что то же самое, в полярной системе координат {Wo, 6). На рис. 2.7, е изображен примерный вид частотной характеристики устойчивой линейной части (кривая /), соответствующей р^нее изображенным характеристикам Uo(co), G(co) и t/(co), К(со), а 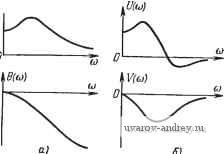
Рис. 2.7. Амплигудно-частотная и фазо-частогная характеристики {а), действительная и мнимая части частотной характеристики (б), амплитудно-фазовые характеристики (е): /-для устойчивой, 2-для нейтральной линейной части. \ также примерный вид частотной характеристики нейтральной линейной части системы (кривая 2). Иногда предпочитают изображать частотную характеристику в логарифмической прямоугольной системе координат (201g Uo(co), 6(со)). Частотные и временные характеристики тесно связаны между собой. Известны соотношения, позволяющие по частотным характеристикам вычислить временные и обратно. Так, если линейная часть системы устойчива, т. е. W (р) имеет все полюсы с отрицательными действительными частями, то импульсная характеристика w{t) определяется формулами w{t)-- и ((d) cos at da (2.65) или w{t) =--V (<o) sin со/ dco. (2.66) Аналогично может быть определена и переходная характеристика h{i) формулами: sin at da или - cos at da. h{t)=U{0) + Соотношения, обратные к (2.65) -(2.68), имеют вид U{a) = h{0)+ { w{t)cosatdt (2.67) (2.68) (2.69) причем V{a)= w (t) sin at dt, w{t) = h{t). (2.70), (2.71) В том случае, когда линейная часть нейтральна и W{p) имеет один полюс, равный нулю, а действительные части остальных полюсов отрицательны, формулы (2.65) и (2.66) заменяются на tc;(/) = f/(0) + cos at da или (0 = t/(0) + 4 cos at da. (2.72) (2.73) a формулы (2.67) и (2.68) - на hit)V{0) + U{0)t + j или h{t)U{0)t + - U(0)-U (ffl) cos(oM(o (2.74) (2.75) в качестве обратных соотношений к (2.72) - (2.75) теперь будем иметь о W (t) sin at dt, (2.76) V (ш) = - -i- j w(t) cos at dt, (2.77) где w{t) = h(t). (2.78) Приведенные выше соотношения являются простыми следствиями основных определений прямого и обратного преобразований Лапласа при р = /со; они справедливы и в том случае, когда W{p)-трансцендентная функция, т.е. для элементов с распределенными параметрами. Для практического применения этих соотношений обычно аппроксимируют и (а), V(a) (если нужно найти w(t)) или w{t), w{t) (если нужно найти U{a) или V(a)) отрезками прямых, для которых вычисление содержащихся в формулах интегралов не представляет труда. Благодаря этому вычисление импульсной w{t) или переходной h{t) характеристик по формулам (2.65), (2.66) или (2.67), (2.68) не требует предварительного определения полюсов передаточной функции W{p), знание которых необходимо при вычислении временной характеристики по формулам разложения. Это обстоятельство особенно важно в тех случаях, когда линейная часть сложна, содержит внутренние, обратные связи, элементы с распределенными параметрами и т. д., т. е. тогда, когда полюсы W{p) не могут быть просто определены через параметры элементов. Методика приближенного определения w{t) или h(t) по U{a) или V{a), а также U(a) и V{a) по w{t) или h{t) довольно подробно описана в литературе по линейной теории автоматического регулирования*). В заключение заметим, что по w{t), и W{ja), по крайней мере принципиально, можно найти реакцию линейной части системы на воздействие любого вида. § 2.3. Уравнения релейных элементов При отсутствии гистерезиса уравнение релейного элемента Можно представить в виде существенно нелинейной зависимости У = Ф{х), (2.79) *) См. В. В. С о л о д о в н и к о в [1], А. А. Воронов [1], [2]. где Ф (х) = kp sign X = К О при X > о, при х = 0, при X < О, (2.80) при отсутствии зоны нечувствительности (см. рис. 1.48, е) и - [sign {х - Ко) + sign {х + щ)] = I -k р при X > Хо, при х|<Ио, при Х<-Ио, (2.81) когда имеется зона нечувствительности (см. рис. 1.48,(5). При наличии гистерезиса уравнение релейного элемента не может быть записано в виде, подобном (2.79), поскольку управляющее воздействие у теперь не однозначно определяется значением управляющего сигнала х. В общем случае уравнение гистерезисного элемента определяется не функцией от управляющего сигнала х, а оператором; определенном на управляющих сигналах х, и может быть представлено в виде y(t) = Q){x{f)f,o\ (2.82) Эта запись показывает, что управляющее воздействие y{t) в момент времени t определяется значением управляющего сигнала x{t) не только в момент времени t, но и его значениями во все предыдущие моменты времени и, кроме того, y{t) зависит от некоторого параметра а*). Для релейных элементов без гистерезиса уравнение (2.82), естественно, упрощается. Рассмотрим вначале релейный элемент с положительным гистерезисом без зоны нечувствительности (см. рис. 1.48, й). Обозначим через а - У\ = +kp значение управляющего воздействия после последнего переключения реле; тогда уравнение релейного элемента с положительным гистерезисом можно представить в виде yit) = 0{x; у^), (2.83) где Ф (х; Уд = - kr, для х>щ, X < - о, - Ко < JC < Ио, если с~у1== kp, если о = у1 = - kp (2.84) *) Задачам описания нелинейных элементов при наличии гистерезиса в общем случае посвящены работы В. А. Якубовича [1], [2] и М. А. К р а с-нрсельскогс [11. Для описания релейного элемента с отрицательным гистерезисом без зоны нечувствительности (см. рис. 1.48, ж) обозначим а = = signi = ±l- Тогда уравнение такого релейного элемента можно записать в форме: где ф(л:; signx) == у = ф{х; signx), kp для I (2.85) kp для (2.86) Х>Ко, Яох> - Ко, - щ^х<щ, если 0 = sign х ~ - 1. Аналогичным образом могут быть записаны уравнения релейного элемента и при наличии зоны нечувствительности. В табл. 2.1 приведены уравнения для типовых релейных элементов с симметричными характеристиками. Для релейных элементов с гистерезисом величина Ф{хЦ); a)dx{t) характеризует приращение площади. Нетрудно проверить, что характеристики релейных элементов с зоной нечувствительности и гистерезисом удовлетворяют неравенствам 0{x{t); a)dx{t)kp\xit) \, (2.87) где а~у1 - dtkp или О, если гистерезис положителен, и Ф(х(0; a)dxit)-kp\x{0)\, (2.88) где а = sign л: = ±1, если гистерезис отрицателен*). Таким образом, уравнение релейного элемента с гистерезисом мы будем записывать в форме у = Ф{х;а). (2.89) Здесь а = у1, где уи равное ± или О - значение управляющего воздействия после последнего переключения, если гистерезис положителен, и а = sign л: = ±1, если гистерезис отрицателен. *) Неравенство (2.88) является частным случаем условия положительности В. А. Якубовича [1], [2]. ТАБЛИЦА 2.1 Характеристики и уравнения типовых релейных элементов у=Ф(х. о)
kp х>0, -kp х<0. у = Ф^{х,а) = X >>{( щ^х> - щ, а = J/I = kp. \ -Кв<:Х<У <Хо, а = у1 = - kp. а X у = Ф^(х, а) = Х>Хо, Ко>х> - Хо, а = signA: = 1. < - Но, ио<х<х;о, <Т= sign X = -1,. У у = Ф^{х) = kp Х> Хо, о -щ<х<щ, - kp л; < - о- 1 ... 4 5 6 7 8 9 10 ... 57 |
||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |