


|
|
|
|
Главная страница » Электрика в театре » Автоматические релейные системы 1 ... 43 44 45 46 47 48 49 ... 57 состоит из двух электромагнитных реле, соединенных по схеме пульс-пары, т. е. так, что контакты первого (второго) реле замыкают цепь обмотки второго (первого). На сердечнике каждого реле находятся основная (0) и управляющая (у) обмотки, причем на одном сердечнике создаваемые ими ампервитки складываются, а на другом вычитаются. Реле Р1 имеет один нормально замкнутый контакт, реле Р2 имеет два контакта: один нормально разомкнутый и другой нормально замкнутый. Последний из них является рабочим. При отсутствии тока в управляющих обмотках оба реле работают как пульс-пара с одинаковой выдержкой времени и, следовательно, с относительной длительностью замыкания контактов, равной половине. При наличии тока в управляющих обмотках выдержка времени одного реле уменьшается, а другого- увеличивается, а следовательно, изменяется относительная длительность замыкания контактов. Это изменение относительной длительности пропорционально току в управляющих обмотках. При достаточно большом токе в управляющей цепи соответствующее реле остается постоянно включенным. В описанных примерах совмещение независимого генератора с релейным элементом осуществлялось за счет придания последнему автоколебательных свойств. Изменение параметров этих релейных элементов позволяет в некоторых пределах изменять частоту дополнительного периодического воздействия. § 12.3. Линеаризация автоколебаниями В качестве дополнительного периодического воздействия, производящего линеаризацию релейной системы, могут быть использованы автоколебания самой релейной системы, если частота их такова, что внешнее воздействие по сравнению с ними можно считать медленно изменяющимся. Так как обычно частота автоколебаний относительно низка, то для осуществления линеаризации необходимо применять способы повышения этой частоты автоколебаний. Такие способы были подробно описаны в § 6.6. В качестве примера системы, где линеаризация происходит благодаря автоколебаниям, можно привести систему автоматической стабилизации самолета - автопилот (см. рис. 1.32). В этой системе повышение частоты автоколебаний, а следовательно, и линеаризация осуществляются благодаря наличию обратной связи в виде контура RC, охватывающего реле. Увеличение частоты автоколебаний может быть достигнуто также введением в управляющий сигнал производной от отклонения и упругих внутренних связей, как это было описано в § 6.6, в вибрационных регуляторах для увеличения частоты автоколебаний, приводящих при некоторых условиях к линеаризации, применяют различные внутрейние связи. В простейшем вибрационном регуляторе напряжения (см. рис. 1.5,6) для этой цели применено специальное ускоряющее сопротивление, которое создает импульсное воздействие, ускоряющее движение якоря реле. В электронном вибрационном регуляторе напряжения (см. рис. 1.7) используется упругая внутренняя связь в виде трансформатора. В вибрационном регуляторе числа оборотов двигателя (см. рис. 1.12) внутренняя связь осуществлена при помощи вспомогательного реле. Назначение всех этих средств состоит в увеличении скорости срабатывания релейного элемента. В вибрационных регуляторах упомянутая выше специальная внутренняя связь вместе с элементами, которые она охватывает, может образовать автоколебательное звено*). Это автоколебательное звено при определенных условиях играет роль генератора колебаний. Если величина, воздействующая на это автоколебательное звено, медленно изменяется по сравнению с автоколебаниями, то в системе будет иметь место процесс линеаризации, если, разумеется эти автоколебания существуют и устойчивы. В этом смысле такой способ линеаризации эквивалентен рассмотренному в предыдущем параграфе способу, при котором генератор дополнительного периодического воздействия совмещен с релейным элементом. Но между этими способами существует и различие. Автоколебательное звено, помимо релейного элемента, содержит еще и элементы системы регулирования. Так, например, в вибрационном регуляторе оборотов (см. рис. 1.12) в автоколебательное звено входит генератор, что ограничивает возможности увеличения частоты автоколебаний. В общем случае линеаризация релейных систем при помощи автоколебаний является менее гибкой, чем линеаризация при помощи вынужденных колебаний, так как мы всегда ограничены в возможности изменения частоты и амплитуды автоколебаний, являющихся дополнительным перрюдическим воздействием. Если линеаризация системы при помощи автоколебательного звена осуществлена, то тогда автоколебательное звено в релейной системе можно заменить линейным или нелинейным усили- телем, и схема релейной системы (рис. 12.8, а) примет вид рис. 12.5,6. Такая линеаризованная схема не зависит от посто- *) См. С. И. Б е р н ш т е й н [1], [2]. янных времени элементов, входящих в автоколебательное звено. Однако эти параметры существенно влияют на частоту и 2)- РЗ вое lit) lit) Рис. 12.8. Линеаризация релейной автоматической системы автоколебаниями (а), схема линеаризованной системы (б). амплитуду автоколебаний, а следовательно, и на условия, при которых возможна линеаризация релейной системы. § 12.4. Линеаризация при помощи скользящего режима Уже было указано в § 3.6, что одним из возможных режимов работы релейных систем является скользящий режим. Скользящий режим, так же как и дополнительное периодическое воздействие, приводит к линеаризации релейных систем. Для выяснения физических особенностей линеаризации при помощи скользящего режима рассмотрим простейшую релейную систему, состоящую из двигателя, управляемого реле и потенциометров, включенных в мостовую схему так, что напряжение, снимаемое движками и питающее реле, пропорционально разности положений задающей оси и оси отработки (рис. 12.9, й). Эту систему можно рассматривать как часть некоторой более сложной системы, не показанной на рис. 12.9, g. Функциональная схема этой части системы изображена здесь же (рис. 12.9,6). Предположим, что задающая ось / (движок потенциометра 1) повернута так, что в диагонали моста R1R2 течет ток, достаточный для срабатывания поляризованного реле 3. При этом включится двигатель 4, который наряду с перемещением регулирующего органа будет через редуктор (внутренняя связь) поворачивать движок 2 второго потенциометра (отработки) до тех пор, пока реле 3 не отпустит. Если двигатель мало инерционен, то он остановится тогда, когда система будет сбалансирована с точностью до величины зоны нечувствительности Хо релейного элемента. 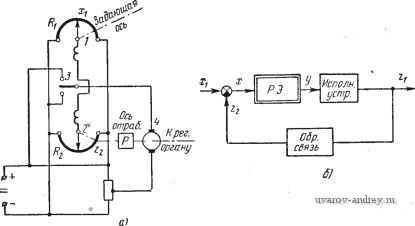 Рис. 12.9. Поясиеиие физических причин появления скользящего режима. Следящая система (й). Структура следящей системы (б). Если ОСЬ / непрерывно поворачивать со скоростью, меньшей, чем скорость оси 2 (при включенном двигателе), то ось 2 будет
Ч 4 i} ч- is ie t t) Рнс. 12.10. Изменение jc Zi и у при скользящем режиме для релейного элемента с гистерезисом и зоной нечувствительности. ДОГОНЯТЬ ОСЬ /. На рис. 12.10,6 показано во времени движение задающей оси / и оси отработки 2 в том случае, когда релейный элемент имеет зону нечувствительности и положитель- ный гистерезис (рис. 12.10, о). В момент времени to начинается движение оси / из нулевого положения Xi = 0. В момент времени ti угол оси / достигает значения щ; при этом реле 3 срабатывает и запускает двигатель. Полагая реле и двигатель без-инерционными, можно изобразить движение оси 2 отрезком прямой а, б. В момент /г разность в положении осей 1 и 2 уменьшится до величины Кщ, реле отпустит и двигатель остановится. Положение оси 2 в последующие моменты времени изобразится участком прямой, параллельной оси абсцисс, вплоть до момента времени ts, когда разность Xi - возрастет опять до значения Ко, реле сработает и двигатель начнет вращаться. Процесс включения и выключения двигателя будет повторяться до тех пор, пока ось 1 движется в одну сторону. Напряжение у, подаваемое на двигатель, представляет собой последовательность частотно-модулированных импульсов (рис. 12.10, в). Такой режим работы релейной системы называется скользящим. Ось отработки 2 следит с определенной точностью за осью /. Если учесть инерционность двигателя, то участки прямых ломаной гг следует заменить участками кривых разгона и торможения (выбега) двигателя. Скользящий режим превращает релейную систему в импульсную систему с частотно-импульсной модуляцией, которая и осуществляет пропорциональное слежение оси отработки за задающей осью. Если коэффициент возврата К близок к единице и двигатель преодолевает соответствующий ему угол быстро, то частота скольжения получается довольно значительной. Очевидно, что с уменьшением гистерезиса частота скольжения возрастает и при К - 1 теоретически стремится к бесконечности. При этом ось 2 будет отставать от оси / на величину ко (рис 12.11, й). Учет запаздывания в релейном элементе приводит к эффекту, аналогичному наличию зоны возврата, величина которой будет зависеть от запаздывания и от скорости задающей оси /. При К = 1 (без учета запаздывания и инерционностей в системе) точность слежения в скользящем режиме будет определяться величиной зоны нечувствительности ко, а при ко = О положение осей 1 и 2 совпадет (рис. 12.11,6). Аналогичный процесс будет иметь место также в системе, изображенной на рис. 12.12. Здесь зона нечувствительности определяется величиной зазора между контактами вилки 3, 3 и пальца 2, а зона возврата создается, например, за счет люфта в задающей оси /. Работа системы аналогична описанной выше, но в этом случае процесс, соответствующий скользящему режиму, прослеживается более наглядно. Средняя скорость исполнительного устройства в скользящем режиме всегда меньше скорости его при длительном включении. Отметим, что скользящий режим не может возникнуть в релейной системе, если характеристика релейного элемента имеет гистерезис и коэффициент возврата К = -1 (люфт, сухое трение), так как такая система двухпозиционна и двигатель не О 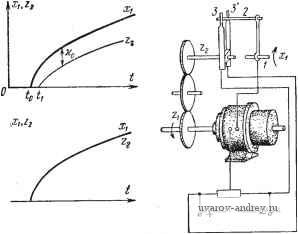 Рис. 12.11. Изменение ж, и Z2 при ско.чьзящем режиме для релейного элемента с зоной нечувствительности (а) и без зоны нечувствительности (6). Рис. 12.12. Релейная система; работающая в скользящем режиме. может отключиться с помощью реле; реле может только изменить направление вращения двигателя, что исключает скользящий режим. x(t) z,(t) lip) Рис. 12.13. Структурная схема релейной автоматической системы, в которой возможен скользящий режим. Таким образом, наличие скользящего режима линеаризует релейную автоматическую систему. Найдем уравнения и структуру такой линеаризованной системы. Для этой цели рассмотрим релейную систему, структура которой изображена на рис. 12.13. Предположим, что релейный элемент идеален, т. е. гистерезис и зона нечувствительности отсутствуют. Как следует из способа построения процессов в релейной системе § 3.2, условия, обеспечивающие нормальное переключение в момент t = ti, имеют (12.16) вид х(.) = 0 x{ti)<0. В рассматриваемом случае x(t) при t = ti испытывает скачок, так что x{ti-0) = x- {и)фх* {ti) = = x{ti + 0). (12.17) При нормальном переключении знаки скоростей x-{ti) и x+{ti) будут совпадать. Отсюда вытекает условие нормального переключения x-{ti)x+{t{)>0. (12.18) & Это означает, что в рассматриваемом случае знак скорости после скачка не меняется (рис. 12.14,6) и характер изменения x(t) вблизи = 1 такой же, как и в случае xr(ti) = = x+{t) (рис. 12.14,g). Возможен и другой характер изменения x{t) вблизи t= = ty (рис. 12.14, е), при кото- В) ром знаки скоростей непосредственно до и после скачка различны, т. е. i-(,) х+(,)< 0. (12.19) kit,)-га,) 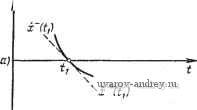  idJiCt,) ilt,)i%)>0 x(t) xit,} 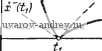 xlt,)*x*(ti) x-(t,lx*ftj)<0 Рис. 12.14. Характер изменения входной величины релейного элемента х (t): а) х (t) изменяется непрерывно при t-ti\ б) i if) испытывает скачок при i=tij ио не меняет знака; в) i (f) испытывает скачок прн t=ti и изменяет знак. Этот случай и соответствует возникновению скользящего режима. Для выполнения условия (12.19) необходимо, чтобы передаточная функция Кс{р) элемента обратной связи, охватывающего релейный элемент (рис. 12.13) имела индекс, равный 1 (см. §§ 5.4, 6.6, 11.8). Из приведенного рассмотрения следует, что при хо = О в скользящем режиме x{t)0 (12.20) а значит, и Х{р)0. (12.200 Уравнения релейной системы (см. рис. 12.13) относительно изображений можно записать в виде X (р) = Xi (р) - Z, (р) = X, (р) - Кс (Р) Y (р). (12.21) X,{p)Fip)-WAp)Y{p). (12.22) В скользящем режиме в силу (12.20) Х(р) = ХЛр)-КЛр)У{р)0, (12.23) откуда находим ¥Ар)=~щХ,(р). (12.24) Кэ(р) представляет собой изображение некоторого эквивалентного управляющего воздействия. Подставляя Уэ(Р) из (12.24) в (12.22), получаем уравнение, определяющее поведение релейной системы в скользящем режиме: .(Р) = - W (р) Кс (Р) Fip) или (12.25) Эти уравнения соответствуют линейной системе, структурная схема которой приведена на рис. 12.15. Нетрудно видеть, что F(p)
Рис. 12.15. Структурпая схема линеаризованной системы, соответствующая релейной системе а скользящем режиме. эта линейная система может быть получена из релейной системы рис. 12.13 путем замены релейного элемента линейным усилителем и последующим устремлением коэффициента усиления к бесконечности. Иными словами, система, линеаризованная благодаря скользяи^ему режиму, совпадает с предельной системой, получаемой при исследовании устойчивости положения равновесия релейной системы в малом (см. §§ 4.3, 4.4). При этом, естественно, выполняются условия устойчивости положения равновесия. При скользящем режиме индекс передаточной функции Кс{р) или, что то же, передаточной функции W{p) = = Kcip)-\-Wii{p), всегда должен быть равен 1. Заметим, однако, что устойчивость положения равновесия релейной системы будет обеспечиваться и при значении этого индекса, равного 2. Сделанный вывод справедлив и для несколько более общей структуры (рис. 12.16), если только индекс передаточной функции контура обратной связи Kc(p)Ki{p) равен 1. В этом случае эквивалентная линейная система, описывающая движение в скользящем режиме, будет по-прежнему иметь вид рис. 12.15. Отсюда следует, что в скользящем режиме не сказываются изменения коэффициентов передаточной функции Kiip) элемента, следующего за релейным элементом, когда они оба охвачены f<c(p) Рис. 12.16, Структурная схема релейной следящей системы, в которой возможен скользящий режим. обратной связью. Таким образом, если релейная автоматическая система устойчива в целом {или в малом) и индекс передаточной функции линейной части системы равен 1, то, начиная с некоторого момента времени, в релейной системе наступает скользящий режим. В иных случаях, когда к релейной системе приложены внешние воздействия и, в частности, периодические воздействия, в системе возможны периодические движения с участками скользящего движения *). Непрерывный скользящий режим будет иметь место, если в любой момент времени О внешнее (по отношению к участку системы, охваченному внутренней обратной связью) воздействие Xi {t) изменяется медленнее, чем воздействие внутренней обратной связи Zi{t), т. е. если в любой момент времени будет выполняться неравенство (12.26) Xi(t)\<\Zi(t) Приведем простой пример определения условий существования непрерывного скользящего режима. Рассмотрим классическую систему регулирования числа оборотов двигателя без самовыравнивания регулятором непрямого действия с сервомотором постоянной скорости. Уравнения этой системы приведены в § 2.5. Схема этой системы (см. рис. 2.13) изображена на рис. 12.17, а. Заменяя участок системы, охваченный внутренней обратной связью, линейным элементом с *) См., например, Ю. В. Долголенко [4], [5], П. В. Бромберг [3]. передаточной функцией, обратной передаточной функцией элемента внутренней связи, получим схему линеаризованной системы (рис. 12.17,6). Внешнее воздействие, представляющее собой ± L{ijiV] ± 5 1 - f-*- L{flt)\ Рис. 12.17. Схема системы регулирования числа оборотов (а). Схема линеаризованной системы (б). скачкообразное изменение нагрузки (см. рис. 12.16, с, б), приведено ко входу релейного элемента и, следовательно, равно Уравнение линеаризованной системы представится в виде i(p) = - или l(p)= 1 бГар2 бГар 1 10 Габр+1 р При этом, поскольку У(р) = 1/р, 2,(р)= (12.27) (12.28) Гср2 Полагая 2i(0) = xi(0) = О, по теореме 2 (Приложение 1) имеем L{2,(/)} = pZ,(p)= и . Во 1 ... 43 44 45 46 47 48 49 ... 57 |
||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |