


|
|
|
|
Главная страница » Электрика в театре » Автоматические релейные системы 1 2 3 4 5 6 7 ... 57 тикали приведено на рис. 1.29. Гировертикаль представляет собой гироскоп с тремя степенями свободы. Ось ротора гиромо-тора 1 установлена вертикально на подшипниках во внутренней рамке 2 карданного подвеса. Ось внутренней рамки жестко связана с ротором реверсивного асинхронного двигателя 3, укрепленного на внешней рамке 4 карданного подвеса. Ось внешней рамки жестко связана с ротором второго реверсивного асинхронного двигателя 5. Обмотки двух фаз этих двигателей подключены постоянно к двум фазам питающей сети. Третья фаза питающей сети подводится через ртутные переключатели б и 7 к двум обмоткам третьей фазы двигателей. Переключение этой фазы с одной обмотки на другую, производимое ртутными переключателями, приводит к реверсу двигателей. 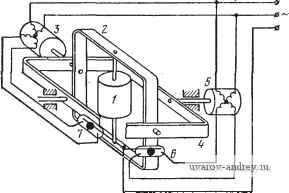 Рис. 1.29. Принципиальная схема гировертикали. Если под действием каких-либо причин ось ротора отклонится от вертикали, то вместе с ней отклонятся и рамки с ртутными переключателями и, следовательно, произойдет включение соответствующих обмоток третьей фазы корректирующих двигателей. Благодаря этому в рамках карданового подвеса будет приложен постоянный по величине момент, устраняющий отклонение оси ротора от вертикали. В качестве второго примера рассмотрим курсовой гироскоп (рис. 1.30), также применяющийся как измерительный элемент автопилота. Курсовой гироскоп состоит из гиромотора /, подвешенного во внешней рамке 2 карданного подвеса. Ось этой рамки параллельна нормальной оси самолета. Внутренняя рамка карданного Подвеса оформлена в виде кожуха гиромотора 3. Курсовой гироскоп снабжен корректирующим устройством, Обеспечивающим перпендикулярность осей ротора и внешней рамки. Это корректирующее устройство одновременно компенсирует моменты, воздействующие на внешнюю рамку. Если ось ротора перпендикулярна к оси внешней рамки, то контактная щетка 4 находится на изоляционном промежутке контактной пластины 5-5. При нарушении перпендикулярности контактная щетка 4 замыкает ту или иную часть контактной пластины 5 или 5. Благодаря этому включается цепь одного из электромагнитов 6-6, который производит сцепление соответствующей фрикционной муфты 7-7. Момент, создаваемый двигателем 8, через фрикционную муфту передается на зубчатое колесо внешней рамки, стремясь повернуть ее в том или ином направлении. Под действием приложенного момента появляется 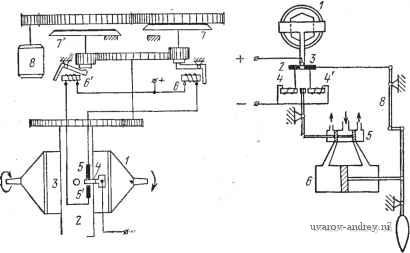 Рис. 1.30. Курсовой гироскоп. Рис. 1.31. Электропиевматический лейиый автомат курса. прецессия, восстанавливающая перпендикулярность между осью ротора и осью внешней рамки. Одновременно с этим происходит разгрузка гироскопического узла, и внешний момент принимает на себя двигатель-Автопилоты. Основным назначением автопилота является поддержание заданного режима полета самолета (курса, крена, тангажа). Автопилот состоит из отдельных автоматов - курсового, продольного и поперечного, которые отличаются главным образом измерительными устройствами. Эти отдельные автоматы могут быть между собой связаны. Ввиду однотипности курсового, продольного и поперечного автоматов рассмотрим лишь первый из них. Простейшая схема электропневматического авто- мата курса изображена на рис. 1.31. При отклонении самолета от заданного курса курсовой гироскоп / сохранит свое направление, а контактная пластинка 2 сместится. Ролик 3 замкнет цепь одного из электромагнитов 4-4. При этом шток золотника 5 сместится, впуская сжатый воздух в ту или иную полость сервомотора 6. Поршень сервомотора, перемещаясь, будет поворачивать руль 7, уменьшая отклонение самолета от курса. Одновременно с поворотом руля при помощи рычага 8 перемещается контактная пластина 2 до тех пор, пока не произойдет  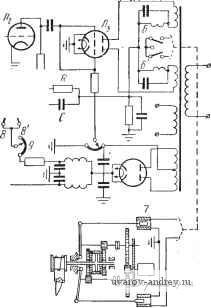 Рис. 1.32. Электрический автопилот. выключение электромагнита 4 или 4. Этот рычаг 3 осуществляет предварительное выключение сервомотора и образует жесткую внутреннюю связь. Схема автомата курса электрического автопилота *) приведена на рис. 1.32. Измерительным устройством автомата является курсовой гироскоп, описанный выше, который при отклонении самолета от Курса перемещает движок потенциометра /. Этот потенциометр вместе с потенциометром внутренней связи 2 образует мостик. f, *) См. Е. В. Ольман, А. Н. Соловьев, В. П. Токарев \\\ С. Пельцор [1]. в диагональ этого мостика включены еще два потенциометра. Напряжение, подаваемое на усилитель - триод Лх благодаря этому не зависит не только от отклонения самолета от курса, но и от крена (потенциометр 3). Потенциометр 4 предназначен для осуществления автоматического разворота. Усиленное напряжение, вместе с положительным смещением, снимаемым с сопротивления 5, подается на сетку лампы Л2 следующего каскада. Из-за положительного смещения эта лампа работает в области насыщения. Установка смещения сопротивления 5 определяет зону нечувствительности этого каскада. Усиленное напряжение подается на фазочувствительный каскад, аноды ламп Лз которого питаются переменными напряжениями, сдвинутыми по фазе на 180°. В цепь анодов включены реле 6-6, которые через силовые реле (не показанные на рис. 1.32) включают соответствующий электромагнит 7 или 7 муфты рулевой машинки, перемещающей с постоянной скоростью в том или ином напразлении руль. Одновременно с этим реле 6-6 при срабатывании замыкают контакты 8-8, которые через сопротивление 9 подают дополнительное положительное смещение на сетку правого триода Л^, снижающее усиление этого каскада. Вследствие этого реле 6-6 отпустит, при этом контакты 8-8 разомкнутся, положительное смещение с сетки триода Л2 снимется и усиление каскада возрастет, что снова приведет к срабатыванию реле 6-6. Таким образом, создается пульсирующая работа электромагнитов 7-7 муфты. Наличие /С-контура 10 приводит к тому, что срабатывание и отпускание реле 6-6 происходит с задержкой времени, определяемой постоянной времени этой цепи, причем так, что время замкнутого состояния контактов тем больше, чем больше величина сигнала. Благодаря таким пульсациям средняя скорость перемещения руля пропорциональна величине сигнала. При больших сигналах рулевая машинка перемещает руль в том или ином направлении с постоянной скоростью. Система автоматической ориентации космического летательного аппарата. Автоматическая ориентация орбитальных космических аппаратов, как правило, осуществляется с помощью реакции струи сжатого газа или пара*). Управление струей производят электрические соленоидные клапаны, работающие по принципу открыто - закрыто , т. е. обладающие релейным действием. Ошибки рассогласования пропорциональны угловым отклонениям оси космического аппарата АВ от заданного направления А'В': а - о, Р - ро, Y - Уо- Эти ошибки формируются оптической системой, наводимой автоматически на небесные светила *) См. Вэз [1], В. М. Куыцевич, Ю. Н. Чеховой [3]. S S2 s- Система автоматической ориентации должна обеспечить равенство нулю или близость к нулю ошибок. Структурная схема одного из каналов системы автоматической ориентации изображена на рис. 1.33. Она состоит из трех каналов, каждый из которых содержит частотно-импульсный регулятор, представляющий собой релейный регулятор с внутренней обратной связью. Сигналы, пропорциональные углам а, р и v с выхода оптической системы поступают на сравнивающее устройство, где 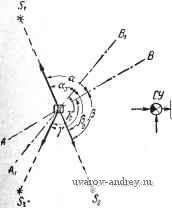 /(:/pl -< >VyP! - Рис. 1.33. Система автоматической ориентации космического летательного аппарата. формируются сигналы ошибок а - ао, Р - Ро и y - Yo- Эти сигналы поступают на корректирующие устройства с передаточными функциями /=1, 2, 3, а затем на нелинейные элементы с насыщением и зоной нечувствительности. Наличие зоны нечувствительности предотвращает срабатывание регуляторов при малых угловых отклонениях оси летательного космического аппарата от заданного направления, что приводит к экономии рабочего тела (сжатого газа). Выходной сигнал нелинейного элемента через инерционные фильтры с Передаточными функциями подается на двухпозиционные релейные элементы, управляющие работой соленоидных клапанов. Эти релейные элементы охвачены единичной обратной связью, благодаря которой работа соленоидных клапанов приобретает импульсный характер. Соленоидные клапаны управляют выпуском струй сжатого газа в космическое пространство, благодаря чему сообщается вращающий момент, уменьшающий ошибку рассогласования. Упрощенная схема одного из каналов, осуществленная на основе магнитных и полупроводниковых элементов, изображена на рис. 1.34. 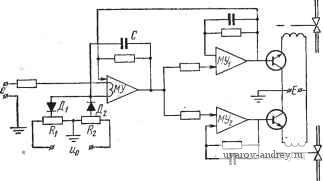 Рис. 1.34. Упрощенная схема канала системы на магнитных и полупроводниковых элементах. Нелинейный элемент с зоной нечувствительности и насыщением здесь представляет собой мостовую схему. Магнитный усилитель совместно с конденсатором С играет роль фильтра, а релейные элементы реализованы с помощью магнитных усилителей с положительной обратной связью. Выходные сигналы этих магнитных усилителей усиливаются транзисторными усилителями мощности и подаются на обмотки соленоидных клапанов. Экстремальная система регулирования. Одним из основных показателей качества процесса выпаривания является коэф-  фициент теплопередачи выпарного аппарата. Так, в процессе выпаривания свекловичного сока в сахарном производстве при ухудшении теплопередачи за счет большого отбора сока происходит полимеризация сахара, а при малом отборе сока понижается производительность. Зависимость коэффициента теплопередачи Q от отбора или расхода сока g имеет явно выраженный экстремальный характер (рис. 1.35). Каждая из этих зависимостей соответствует различным концентрациям первичного сока. Рис. 1.35. Зависимости теплопроводности Q от расхода g. Задача экстремального регулятора состоит в поддержании максимального значения коэффициента теплопроводности и тем самым максимального качества процесса выпарки. Схема релейной экстремальной системы*) приведена на рис. 1.36. Коэффициент теплопроводности определяется выражением Q = k ,дц g - расход сокового пара, Д0 - перепад температуры на стенках кипятильных трубок, k - постоянная. Данные датчиков  Соиодый Imp Сои 2 &е \коиденсат Сои Рис. 1.36. Релейная экстремальная система регулирования. расхода / и перепада температуры 2 подаются на делитель 3 и определяют величину, пропорциональную Q. Напряжение с выхода делителя 3 включает поляризованное реле 4, которое заставляет одновременно сработать реле 5 заряда конденсатора С в Цепи катодного повторителя 6. Благодаря заряду конденсатора С ампер-витки встречной обмотки реле 4 быстро нарастают; реле возвращается в нейтральное положение, а конденсатор фиксирует величину заряда. Этот процесс повторяется до достижения системой экстремального режима. После прохода экстремума коэффициент Q уменьшается, и напряжение срабатывания поляризованного реле 4 *) См. И. с. М о р о с а н о в [1]. изменяется на обратное. Происходит реверс исполнительного двигателя Д, конденсатор С начинает работать на разряд. В конечном итоге в системе возникает автоколебательный режим вокруг экстремального значения*). § 1.2. Линейная часть системы и релейные элементы В предыдущем параграфе мы познакомились с разнообразными схемами релейных систем автоматического регулирования. Для дальнейшего рассмотрения целесообразно в структурной схеме релейной автоматической системы (рис. 1.37) выделить Испот утр. Регулир. объект Линейная часть
Внитр. ешь УпраВл. устр. Релейн. элем. Г~ раВк. I 71 ~ устр. г * Рис. 1.37. Структурная схема релейной автоматической системы: / - линейная часть. релейный элемент и рассматривать релейную систему как соединение релейного элемента и линейной части. Линейная часть системы, таким образом, включает в себя все элементы, за исключением релейного, т. е. исполнительное устройство, регулируемый объект, измерительное, задающее и сравнивающее устройства, управляющее устройство и различные внутренние связи. Каждый из этих элементов, выполняя определенные функции, является преобразователем входной величины в выходную. Выходная величина элемента может отличаться от входной величины физической природой, формой, т. е. законом изменения по времени, и уровнем энергии. Эти отличия и степень их важности зависят от назначения того или иного элемента в системе регулирования. Так, например, для измерительных устройств характерно преобразование измеряемой величины в величину иной физической природы, чаще всего в электрическую величину, причем особые требования в этом случае предъявляются к сохранению закона изменения выходной величины по *) Описание различных иных релейных систем экстремального регулирования можно найти в упомянутой книге И. С. Моросанова [1]. времени таким же, как и закон изменения входной величины по времени. Уровень энергии выходной величины обычно существенного значения не имеет и, как правило, он невелик. В усилительном устройстве (в данном случае это релейный элемент) первостепенное значение приобретает повышение уровня энергии выходной величины. То же относится и к исполнительному устройству. Наконец, в управляющих устройствах наибольшее значение приобретает закон изменения выходной величины, который должен определенным образом зависеть от закона изменения входной величины. Для образования необходимого закона, т. е. формирования управляющего сигнала, в управляющее устройство специально вводятся дифференцирующие и интегрирующие элементы и применяются внутренние связи. Физическая природа выходной величины и уровень энергии ее играют большую роль при проектировании систем автоматического регулирования, при выборе ее элементов. Однако эти факторы непосредственно не участвуют в исследовании динамических и статических свойств систем. Важнейшим фактором в этом исследовании является закон изменения выходной величины, который характеризует динамические свойства элементов. С этими вопросами мы познакомимся более подробно в главе П. В релейных автоматических системах управляющий сигнал, который мы обозначим через x{t), представляет собой входную величину релейного элемента. Выходную величину релейного элемента, называемую управляющим воздействием, обозначим через y{t). -Характерная особенность релейных элементов, как это следует из рассмотрения конкретных релейных систем, состоит в том, что всякий раз при прохождении управляющим сигналом (входной величиной) некоторых пороговых значений, управляющее воздействие (выходная величина) изменяется скачком, а между скачками оно постоянно, в частности, равно нулю. Для того чтобы наглядно представить себе возможные виды характеристик релейных элементов, определяющих зависимости между управляющим сигналом (входной величиной) и управляющим воздействием (выходной величиной), рассмотрим простейшие модели релейных элементов. Входной величиной в этих моделях для наглядности принят угол поворота, а выходной величиной - напряжение, снимаемое с движка и контактных пластин. Рассмотрим сначала модель релейного элемента с люфтом (рис. 1.38,а). Угол поворота оси 1 не передается на ось, с которой связан движок 4, до тех пор, пока палец 2 не коснется вилки 3. После Этого вилка увлекается пальцем так, как если бы связь между ними была жесткой, и движок, попадая на контактную пластину 5 или 5, включает на выходные клеммы постоянное напряжение той или иной полярности. При движении пальца в обратном направлении движок будет неподвижен до тех пор, пока снова палец не коснется вилки, т. е. до тех пор, пока палец не выберет люфт. После этого вилка снова увлекается пальцем и движок с одной контактной пластины переходит на другую. При этом полярность напряжения на выходных клеммах изменяется скачком. Зависимость управляющего воздействия у от управляющего
Рис. 1.38. Мрдель релейного элемента с люфтом (а) и его характеристика (б). сигнала дг, определяющая характеристику релейного элемента, имеет вид, показанный на рис. 1.38,6. Величина 2хо определяется раствором вилки, а - напряжением, снимаемым с релейного элемента. Эта характеристика неоднозначна. Выходная величина релейного элемента в этом случае определяется не только значением входной величины, но и направлением ее изменения. 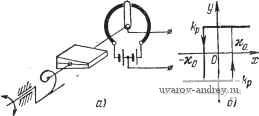 Рис 1.30. Модель релейного элемента с трением (а) и его характеристика (б). Подобная характеристика соответствует релейному элементу при наличии сухого трения, если коэффициенты трения покоя и трения движения принять равными и если пренебречь массой или моментом инерции подвижных частей*). Модель такого релейного элемента приведена на рис. 1.39. В этом случае 2хо пропорционально моменту трения. Если ха- *) Далее, говоря о трении в релейном элементе, мы будем всегда предполагать, что эти условия выполняются. 1 2 3 4 5 6 7 ... 57 |
||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |