


|
|
|
|
Главная страница » Электрика в театре » Автоматические релейные системы 1 ... 29 30 31 32 33 34 35 ... 57 Отсюда следует, что при А > Л™ = Im [/i (соо) ~ Jy (ш„)] - (8.51) (8.52) 2 sin vyin угол ф определяется из уравнения Im [У, (шо) - 1у (ш)] - 2щ cos (VYlK - ф) = -;г-р^- И здесь имеет место картина, аналогичная описанной выше (см. рис. 8.17). Может оказаться, что на некоторой частоте (О = СОв одновременно выполняются условия существования субгармонических колебаний различного порядка. Возникновение тех или иных субгармонических колебаний зависит от предыстории состояния системы. Выше везде шла речь о двух условиях существования вынужденных колебаний основной частоты или субгармонических различных порядков: об условии надлежащего момента переключения и условии надлежащего направления переключения. Что же касается третьего условия существования вынужденных колебаний основной частоты или субгармонических колебаний - отсутствия дополнительных переключений, то оно автоматически проверяется при построении формы вынужденных колебаний. Этому вопросу посвящена глава XI. Если искомые вынужденные колебания (основные или субгармонические) существуют и они устойчивы, то это значит, что ранее существовавшие автоколебания иной частоты будут подавлены внешним воздействием или, иначе говоря, произойдет захватывание на частоте внешнего воздействия. В этом случае внешнее периодическое воздействие навязывает релейной системе свою частоту Шв или частоту coe/v и подавляет возможные б системе автоколебания. Такое свойство нелинейных систем часто эффективно используется для срыва автоколебаний и линеаризации релейных систем. Эти возможности будут подробно рассмотрены в главе XII. Рис. 8.19. Определение параметров субгармонических колебаний ф и zq по кривым Г(-1 и Г,-. § 8.6. Примеры Исследование вынужденных колебаний частоты шо или vcoo состоит в установлении условий их существования, исследования устойчивости, формы и максимальной величины вынужденных колебаний. в настоящем параграфе рассматриваются лишь условия существования, т. е. определяются критические значения амплитуды Л внешнего воздействия, выделяющие области вынужденных колебаний частоты Шв = vcoo- Устойчивость вынужденных колебаний исследуется в главе X, а определение их формы производится в главе XI. 1. Следящая система. Предположим, что к задающей оси следящей системы, автоколебания в которой рассматривались в предыдущей главе, приложено внешнее гармоническое воздействие частоты Шв = Шо. ijlmJ(u) 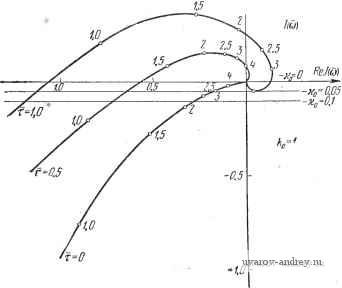 Рис. 8.20. Годограф / (со) релейной следящей системы прн и различных т. Заметим, что если это воздействие является дополнительным, то оно может быть введено в систему различным образом. Примеры введения его описаны в § 1.1 и, в частности, для следящей системы один из таких способов приведен на рис. 1.24. Функциональная схема следящей системы имеет по-прежнему вид, изображенный на рис. 2.11, где следует считать, что ?о(0 = ?д(0=/15тК;-ф). Для определения возможности существования вынужденных колебаний воспользуемся выражениями годографа релейной части системы /(со). Годографы /(ш) при т=0; 0,5; 1, и k-X воспроизведены на рис. 8.20. Используя выражение годографа /(со) (6.ЮГ) при 1=1, находим по формулам (8.20) и (8.22) значения А при йо в виде Ai кр ~~кГ 1 п 2 кр (8.53) и IzKP 1 я . , 1 +е л о СОо 1+е ® /J (8.54) 11 кр где йоиТм- Зависимости -или - от ш можно непосредственно определить по графику /(ш) при kQ=l, если провести на этом же графике прямую -Построенные таким обра- А зом зависимости , для хо==0 И т = 0; 0,5; 1, изо- о 10 бражены на рис. 8.21, а -в соответственно. Области /, лежащие ниже кривой -Л^, соответствуют режиму биений или субгармоническому режиму. Области и /, лежащие между кривыми -7- и и выше кривой соответствуют ко ко -.f .. режиму вынужденных колебаний. В области / имеется одно периодическое решение 1ф1<, а в области - два периодических решения (ф1<--), [ф2 1>--)- Влияние временного запаздывания сказывается на том, что частота автоколебаний, соответствующая Л] кр = О, смещается 1 кр б сторону низких частот. Критические значения --- для т > О Al кр при малых значениях частот меньше ---, соответствующих т==0, а затем при превышении некоторой величины ш становятся больше этих значений. Предположим теперь, что Хо > 0. Тогда зависимости А -г- ОТ СОо изменятся. Эти зависимости для - = 0,05 и ==0,1 при различных т изображены на рис. 8.22 и 8.23, о - в соответственно. 0.В 0.2 О ХоО ID г.О 5.D f.D йв 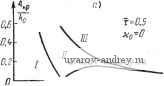 i.D 2.0 ID W Cjb 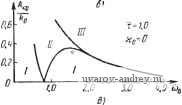  Рис. 8.21. Зависимости -~- or Og при Рис. 8.22. Зависимости от cog прн =0,0,5. кр  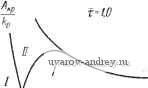 W 1.0 to tp о ID То tp 0,6 O.-i 0.2 В  ш Г'0,5 -0,1 о .о 2.0 3.0 4,0 Рис. 8,23, Зависимости от й3 при --=0,1. Из этих зависимостей можно заключить, что влияние щ в некотором смысле качественно подобно влиянию временного запаздывания т. Полученные графики позволяют выбрать частоту и амплитуду внешнего воздействия, при которых в системе будет возможен режим вынужденных колебаний частоты юо = ©в-. Рассмотрим возможность существования субгармонических колебаний. Обозначим частоту внешнего воздействия через 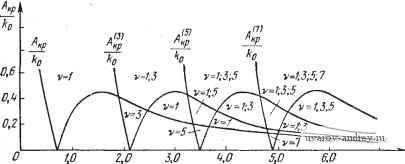 10 ыв Рис. 8.24. Зависимости - от при Ио=0,5; -с=1, определяющие области существования субгармонических колебаний. Шв = vшo; тогда субгармонические колебания будут иметь ча стоту ©0 = , где V = 3, 5, 7. Для существования субгармонических кодебаний необходимо выполнение условия (8.46) 1 кр> где Л*1кр в рассматриваемом случае определяется из (8.53) при Юв замене щ на , т. е. 1 кр 1 п\ т--+1 о в частном- случае, при отсутствии запаздывания т = 0. 1 кр I nv 7 fen (8 55) (8.56) Зависимости от Шв при т = 1 изображены на рис. 8.24. Здесь же приведена также зависимость -Эти зависимости определяют области существования вынужденных колебаний основной частоты Шв = шо и субгармонических колебаний СОо = порядка v. В каждой из областей указаны порядки возможных колебаний. При малых амплитудах внешнего воздействия мы попадаем в области, где возможно существование только одного режима. С увеличением амплитуды возможно попадание в области существования нескольких режимов. 2. Система автоматического регулирования температуры. Предположим, что к релейному элементу системы автоматического регулирования температуры, функциональная схема которой имеет вид (рис. 2.10), приложено гармоническое воздействие f(t) = Asin{aJ - ((>). Определим область существования режима биений и вынужденных колебаний, т. е. зависимость /4,ф от со. Для этого воспользуемся ранее построенным годографом /, (со) для /гп=1 при р = 0 (см. рис. 6.42). Проведя на ней прямые -для значений х = 0, - = 0,015 (рис. 8.5), находим зависимости --г- и -г-, которые и при- ведены на рис. 8.26 для Хо = 0 и на рис. 8.27 для - = 0,013. Как и ранее, область / соответствует режиму биений (отсутствию периодических решений), область соответствует наличию двух периодических решений, отличающихся фазами, и область / - наличию одного периодического решения. В заштрихованной области возможно существование субгармонического режима порядка v = 3. 3. Электрический привод. Рассмотрим несколько иной пример, связанный с влиянием сухого трения на валу электрического привода при гармонически изменяющемся движущем моменте. Уравнения электрического привода были составлены в § 2.5, а в § 3.2 были построены переходные процессы при гармонически изменяющемся движущем моменте. Предположим, что движущий момент электрического привода, описанного в § 2.5, имеет вид f, (О = £ sin (соо^ - ф'), и на валу его действует момент сухого трения. Тогда, как было показано в § 2.5, привод можно привести к некоторой эквивалентной релейной системе (см. рис. 2.16,6). Передаточная функция линейной части системы равна -0.15 Рис. 8.25. Определение -~ по годографу /(о системы регулирования температуры. 7 8 -0,05 }io О К jImJiu) ReM) 0,01 -0,04 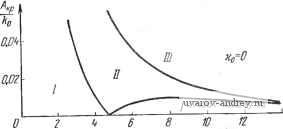 Рис. 8.26. Зависимости от tOg при >{о=0. 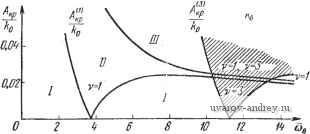 Рис. 8.27. Зависимости от при -=0,015, определяющие области существова- иия субгармонических колебаний (v =3). а приведенное ко входу релейного элемента внешнее воздействие в установившемся режиме будет равно *) fit) = sin (шо/ - ф' - arctg 7 а)) = А sin ((Oq - ф). Функция f (t) представляет собой реакцию линейной части системы на гармоническое воздействие и физически соответствует 1тМ) скорости привода при отсутствии сухого трения. Передаточная функция W{p) совпадает с точностью до обозначений с передаточной функцией, приведенной в  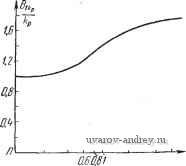 О/ OA г 4 бШо'Т^ш Рис. 8.28. Годограф /(о электропривода p c. 8.29. Зависимость от о) . при учете сухого трения. ft в графе 2 таблицы 6.4 (стр. 258). Поэтому можно записать годограф /(со) в виде где /го = /гдв^р. Вводя относительную частоту й = ш7 м, получаем /(o) = -/ao{-i-(l-th-2f)+/th}. (8.57) Годограф /(со) при fto = 1 изображен на рис. 8.28. Критическое значение амплитуды согласно (8.20) будет равно *) См. также § 3.5. Так как амплитуда внешнего воздействия, приведенного ко входу релейного элемента, равна то условие существования вынужденных колебаний Л > Л, кр в развернутой форме примет вид В В. к (8.59) (8.60) (8.61) Зависимость критической амплитуды, отнесенной к ftp трения, В> кр т. е. -7-, от юо==соо/м, построенная по этому выражению. 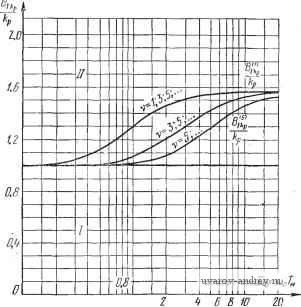 е,/ ОЛ DA 0.6 1.0 Рис. 8.30. Зависимости b(v) кр - от CDg, определяющие области существования субгармо-ннческих колебаний. приведена на рис. 8.29. Область , лежащая выше этой кривой, соответствует режиму вынужденных колебаний. Условие существования субгармонических колебаний согласно (8.61) будет иметь вид где Mlp получается из (8.61) заменой ©о на =/(¥-- Зависимости -г^- от Шв при v = 1, 3, 5 приведены на рис. 8.30. Здесь же указаны области существования режима вынужденных колебаний и субгармонических режимов различного порядка v. Эти области расположены над соответствующими кривыми Bnjkp. Порядок субгармонических колебаний в соответствующих областях указан значениями v в областях, заключенных между кривыми Bilplkp и SlVp/ftp, где v = 3, 5, ... В области, лежащей ниже горизонтальной прямой Bi кр/kp = 1, вынужденные режимы отсутствуют. Здесь возможны режимы движения электрического привода с остановками (прерывистое движение). Так как в режиме синхронизации или вынужденных колебаний на основной частоте или на субгармониках происходит подавление автоколебаний, то, выбирая надлежащим образом частоту внешнего воздействия, мы тем самым увеличиваем частоту периодического режима в релейной системе. В ряде случаев такой способ повышения частоты периодического режима может оказаться более удобным, чем способы, описанные в § 6.4. 1 ... 29 30 31 32 33 34 35 ... 57 |
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |