


|
|
|
|
Главная страница » Электрика в театре » Автоматические релейные системы 1 2 3 4 5 6 ... 57 в положении равновесия флажок 4, укрепленный на стрелке нульгальванометра 5, пропускает на фотоэлементы равные световые потоки. Так как фотоэлементы включены по схеме фотоэлектронного выпрямителя, то при равной освегценности обе полуволны выпрямленного ими тока имеют равные амплитудные значения и одно и то же направление во внешней цепи. Этот ток создает на сопротивлении 6 отрицательное смещение, подаваемое на сетки тиратронов, которое обратно по фазе положительным полуволнам напряжения на анодах, и поэтому тиратроны будут заперты. При разбалансе, вызванном изменением измеряемого напряжения, рамка нульгальванометра повернется и перекроет световой поток к одному из фотоэлементов. Этот фотоэлемент запрет соответствующую полуволну фототока. Благодаря этому отрицательное сеточное смещение с тиратронов снимется на полпериода и соответственно зажжется тот тиратрон, на аноде которого действует в это время положительная полуволна напряжения. На двигатель 7 будут действовать толчки тока, создающие пульсирующий момент одного знака. Среднее значение этого момента постоянно, и двигатель с постоянной скоростью будет перемещать движок 8 реохорда 9. Если перекроется световой поток другого фотоэлемента, то будет зажигаться другой тиратрон каждые полпериода положительного напряжения на его аноде. Импульсный ток будет того же направления, но сдвинут по фазе на 180°. Следовательно, теперь двигатель будет перемещать движок реохорда с постоянной скоростью в обратном направлении. Автоматический потенциометр ВЭИ*), схема которого приведена на рис. 1.16, также не содержит контактного устройства. Благодаря применению асинхронного двигателя с короткозам-кнутым ротором, скорость не регулируется, перемещение движка реохорда осуществляется всегда с постоянной скоростью, как и в рассмотренных выше случаях. Напряжение разбаланса при помощи угольного модулятора / (столбик из угольных шайб, периодически изменяющий сопротивление) преобразуется в переменное напряжение. Это напряжение через трансформатор 2 подается на усилитель напряжения Л\ и фазочувствительный усилитель Лд. На анодах лампы Лд напряжения сдвинуты по фазе на 180°. При балансе анодные токи в анодной цепи фазо--чувствительного усилителя равны друг другу. При разбалансе Модулированный сигнал разбаланса совпадает по фазе с анодг ньш напряжением одной половины лампы Лг и противоположен По фазе анодному напряжению другой половины лампы Л^ Нодные токи фазочувствительного усилителя Лг становятся *) См. Б. А. Барский [1]. неравными. Разностный ток, пропорциональный разбалансу, питает управляющую обмотку дифференциального магнитного усилителя 3-3. Выходное напряжение усилителя, фаза которого зависит от знака разбаланса, подводится к асинхронному двигателю 4 с короткозамкнутым ротором, который с постоянной скоростью перемещает в ту или иную сторону движок 5 .реохорда 6. 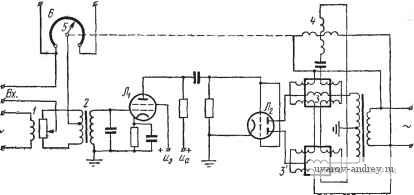 Рис. I.I6. Автоматический потенциометр ВЭИ. В ряде случаев для увеличения быстродействия автоматических потенциометров применяются внутренние связи как линейные, так и нелинейные. Автоматические потенциометры часто  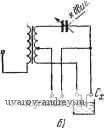 и усилип щ Рис. I.I7. Измерение сопрогнвлепия К^, емкости С^. и индуктивности ijj автоматическим потенциометром. Применяются в качестве измерительных устройств разнообразных физических величин. Для этой цели на вход потенциометра включают соответствующий датчик, преобразующий измеряемую величину в напряжение. Автоматические потенциометры также применяются для измерения параметров С и L. В этом случае реохорд или заменяющие его переменные емкость и индуктивность включены схему моста, одним из плеч которого является измеряемый параметр, как это показано на рис. 1.17, а, б, в. Компенсационные телеизмерительные устройства. По принципу работы компенсационные телеизмерительные устройства подобны автоматическим потенциометрам *). Обычно в компенсационных телеизмерительных устройствах происходит сравнение и уравновешивание моментов, а выходная величина представляет собой ток, посылаемый через линию связи к измерительному прибору. Одна из схем компенсационного телеизмерительного устройства приведена на рис. 1.18. . 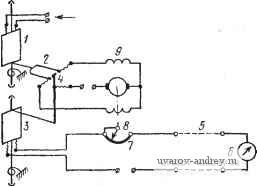 Рис. 1.18. Компенсационное телеизмерительное устройство. Стрелка измерительного прибора / выполнена в виде вилки 2 с контактами, а стрелка компенсационного прибора .5 несет на себе подвижной контакт 4. Рамка компенсационного прибора включена в цепь линии связи 5 через реостат 7, регулирующий силу тока в ней. Движок 8 реостата перемещается двигателем 9, который управляется контактным устройством. Если момент прибора / (пропорциональный измеряемой величине) и момент компенсирующего прибора 3 (пропорциональный току в линии связи) равны по величине и противоположны по знаку, то подвижной контакт 4 будет находиться внутри вилки 2, не касаясь ее-контактов, и двигатель 9 будет неподвижен. При изменении измеряемой величины равновесие моментов нарушится. Это приводит к замыканию подвижного контакта с соответствующим контактом вилки. Двигатель начнет вращаться, перемещая при этом движок реостата до тех пор, Пока изменение тока в линии не приведет к равновесию моментов. *) См. Г. М. Жданов [1], [2]. в отличие от этой системы, в телеизмерительном устройстве вибрационного типа (рис. 1.19) передача величины производится не постоянным током, а током, непрерывно колеблющимся относительно некоторого значения. Принцип работы этой системы подобен принципу работы вибрационного регулятора напряжения. Момент измерительного прибора /, пропорциональный измеряемой величине, уравновешивается компенсационным устройством, выполненным в виде поляризованного реле 2. При замыкании контактов 8 реле включается линия связи. Ток в обмотке реле будет возрастать. Вместе с ним будет возрастать и противодействующий момент реле до тех пор, пока контакты 3 не разомкнутся. При размыкании контактов в цепь линии связи включится конденсатор 4, который ранее был замкнут на сопротивление 5. Этот конденсатор будет заряжаться, при этом ток в линии будет уменьшаться. Вместе с ним уменьшится и противодействующий момент реле, до тех пор, пока контакты не 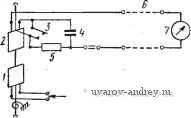 Рис. 1.19. Компенсационное телеизмерительное устройство вибрационного типа. 1 -1> 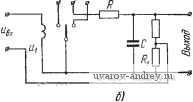 Рис. 1.20. Релейный компенсационный усилитель постоянного тока ИАТ: с) - однополяр- иый, б)-двухполярный. разомкнутся. Далее процесс повторяется снова. Средняя величина момента пропорциональна среднему току, который в свою очередь пропорционален измеряемой величине. В качестве компенсационного телеизмерительного устройства в ряде случаев может быть использован так называемый релейный компенсационный усилитель постоянного тока ИАТ АН СССР *). Схемы двух вариантов его даны на рис. 1.20. В схеме рис. 1.20, а, реле, которое может быть как электромагнитным, *) См. Н. В. П о 3 и н [I]. так и электронным, подключает или отключает источник питания к цепи RC. Часть выходного напряжения, снимаемого с сопротивления Ri, подается на вход реле так, чтобы оно вычиталось из входного сигнала. Если источник напряжения включен на цепь RC, то конденсатор С будет заряжаться. Напряжение щ будет возрастать, а разность вх - i уменьшаться. Этот процесс будет длиться до тех пор, пока разность Ывх - Щ станет равной напряжению отпускания реле. При этом реле отключит источник питания и конденсатор С начнет разряжаться, щ будет уменьшаться, а разность вх - til увеличиваться. Этот процесс будет продолжаться до тех пор, пока разность Ывх - Щ не станет равной напряжению срабатывания реле. Далее процесс будет повторяться. Схема рис. 1.20,6 отличается от рассмотренной лишь тем, что в ней применено поляризованное реле, переключающее полярность источника питания. Благодаря этому схема рис. 1.20,6 реагирует и на полярность сигнала. Выходное напряжение в релейном компенсационном усилителе постоянного тока испытывает колебания относительно среднего значения, которое пропорционально величине входного напряжения. Автоколебательный конвертор. Конвертор представляет собой преобразователь напряжения или тока одного уровня в другой*). Благодаря высокой эффективности и простоте конверторы широко применяются в устройствах космической связи, где существенны малые габариты и g- надежность. Имеются два основ- * il-vw4 7 ? ных типа конверторов: с внешним / vp/4 I [ I [ возбуждением и с самовоз- ис. 1.21, Схема автоколебательного конвертора. Рнс. 1.22. Изменение напряжения на входе фильтра. буждением. Конверторы с самовозбуждением или, иначе, автоколебательные конверторы, характеризуются простотой и широким диапазоном преобразования. Схема автоколебательного Конвертора изображена на рис. 1.21. Приложенное ко входу Конвертора напряжение щ подвергается коммутации при помощи транзисторного ключа Q, управляемого триггерной *) См., например. Баба а, Уилсон, Ю. [1], Джадд, Чей [1], - цепью Т. На мощном диоде Д образуется пульсирующее напря-. жение щ (рис. 1.22). Среднее значение этого напряжения щ, выделяемое сглаживающим фильтром, сравнивается с постоянным задающим напряжением о- Ошибка е == о - Щ управляет работой триггерной цепи, которая изменяет базовый ток 1в транзисторного ключа, представляющего собой реле с гистерезисом. Уровень преобразования входного напряжения в выходное зависит от времени замыкания и размыкания ключа. Принципиальная схема конвертора (рис. 1.21) может быть преобразована в эквивалентную схему релейной системы (рис. 1.23), состоящей РЯс. 1.23. Автоколебательный конвертор как релейная система. ИЗ реле с несимметричной характеристикой и гистерезисом и линейной части - фильтра LCR. Параметры автоколебательного режима зависят от постоянного внешнего воздействия. Таким образом, конвертор представляет собой релейную автоколебательную систему, работающую в режиме несимметричных автоколебаний. Следящие системы. Следящую систему можно рассматривать ак регулятор положения, назначением которого является приведение в соответствие положения отрабатывающей оси и задающей. Следящие системы применяются для дистанционного управления объектами, промыш ленными процессами. Они исполь зуются также в разнообразных счетно-решающих устройствах В следящих системах относительно небольшой мощности часто применяется релейное управление двигателем постоянного или переменного тока. Схема простейшей релейной системы приведена на рис. Г.24. На обмотку чувствительного поляризованного реле / подается нйпряжение, пропорциональное рассогласованию задающей 2 и отрабатывающей 3 осей. При отличии этого напряжения от нуля реле срабатывает, замыкая тот или иной контакт 5-5, включаю- 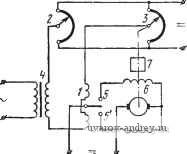 РиС. 1.24. Простейшая релейная щая система. щий цепь двигателя постоянного тока 6, который через редуктор 7 перемещает в соответствующем направлении отрабатывающую ось. Если мощность контактов реле недостаточна для коммутации тока в цепи двигателя, то система снабжается дополнительным, более мощным реле. Для уменьшения трения и получения пропорционального управления двигателем на обмотку поляризованного реле через трансформатор 4 подается дополнительное переменное напряжение, частота которого в 10-15 раз выше самой высокой частоты входного сигнала. Схема релейной следящей системы на переменном токе приведена на рис. 1.25. Для увеличения чувствительности, а следовательно, и точности работы здесь применены два каскада усиления. Стабилизация системы осуществляется тахометрической 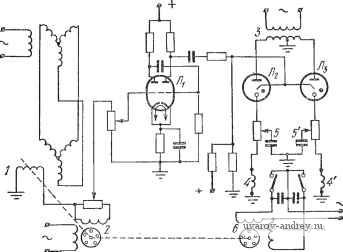 Рис. 1.25. Следящая система на переменном токе с тахогенератором. внутренней связью. Напряжение, пропорциональное рассогласованию задающей и отрабатывающей осей, снимаемое с ротора сельсина-трансформатора /, вместе с напряжением индукционного тахогенератора 2 подается на вход усилителя Л). Выходной каскад состоит из двух тиратронов Лг, Лз, питающихся от повышающего трансформатора 3 со средним выводом. В катодные цепи тиратронов включены обмотки реле 4-4, зашунтирован-ные конденсаторами 5-5. Так как напряжения на анодах Лг, Лз сдвинуты по фазе на 180°, а сигналы на сетки тиратронов подаются в фазе, то через один тиратрон проходит ток в течение промежутка времени, когда анодное напряжение положительно при одной полярности сигнала, а через другой тиратрон -при обратной полярности. Следовательно, одно реле будет срабатывать при одной полярности сигнала, а другое - при обратной полярности. Двухфазный двигатель 6, управляемый этим реле, будет вращать ось отработки, а с ней тахогенератор в направлении, зависящем от полярности сигнала. Конденсаторы 5-5, включенные в цепь катодов тиратронов параллельно обмоткам реле, подзаряжаются в течение промежутков времени пропускания тока тиратронами, что вызывает повышение напряжения на катоде, которое на несколько периодов запирает соответствующий тиратрон. Это продолжается до тех пор, пока напряжение на катоде его не упадет до такой величины, при которой сеточное напряжение сможет вновь зажечь тиратрон. Промежутки времени зажигания тиратронов тем меньше, чем больше величина.сеточного напряжения, т. е. частота импульсов тока в тиратроне при малых значениях напряжения на сетке меньше, чем частота импульсов при больших значениях этого напряжения. Благодаря этому скорость двигателя 6 пропорциональна рассогласованию, точнее, управляющему сигналу*). Того же эффекта линеаризации релейной системы можно достигнуть резким повышением усиления, приводящим к возникновению автоколебаний относительно высокой частоты. Эти автоколебания, очевидно, производят такое же действие, как и дополнительное переменное напряжение повышенной частоты в системе, показанной на рис. 1.24, или пульсации, создаваемые емкостями 5-5 в системе на рис. 1.25. Быстродействие следящих систем ограничивается обычно инерцией двигателя. Для уменьшения этой инерции можно применить реверсивную магнитную муфту, включаемую, как показано на рис. 1.26. В этом случае двигатель имеет постоянное число оборотов, а реверсирование отрабатывающей оси осуществляется переключением обмоток магнитной муфты поляризованным реле /. Для улучшения свойств следящей системы, увеличения ее быстродействия, с отрабатывающей осью Нагрузка Рис. 1.26. Следящая система с магнитными муфтамн. *) См. А. Я. Брейтбарт [1]. связан тахогенератор 2, сигнал которого, пропорциональный скорости отрабатывающей оси, через нелинейный преобразователь 3 подается на дополнительную обмотку поляризованного реле. В ряде случаев необходимо, чтобы некоторая величина (напряжение, частота, смещение) управляла не положением какой-либо оси, а скоростью изменения этого положения. По отношению к обычной следящей системе такую следящую систему можно рассматривать как интегратор. С другой стороны, следящая система с управлением по скорости может рассматриваться как система автоматического регулирования скорости с переменной задающей величиной. Одна из схем подобной следящей системы приведена на рис. 1.27. 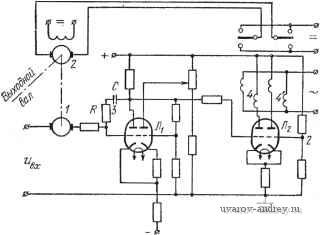 Рис. 1.27. Следящая система с управлением по скорости. * В этой системе тахогенератор 1, связанный с осью двигателя 2, создает напряжение, пропорциональное скорости вращения двигателя. Это напряжение сравнивается со входным напряжением их и разность их подается на вход первого каскада усилителя, состоящего из двух триодов Jli, включенных так, чтобы колебания накала компенсировались. /?С-контур 3 играет роль стабилизатора и фильтра. В анодные цепи выходного усилителя постоянного тока включены обмотки реле 4-4, управляющие двигателем 2. Для получения плавной зависимости скорости двигателя от входного напряжения применяется внешнее дополнительное возбуждение колебаний контактов реле. Для этой цели на дополни- тельные обмотки каждого реле подается переменное напряжение промышленной частоты. Примером применения следящей системы с управлением по скорости является система измерения скорости судна (рис. 1.28). В этой системе сравнивается давление, создаваемое центробежным насосом /, со скоростным напором, создаваемым трубкой Пито 2 при движении ее в воде. Так как давление, создаваемое насосом, зависит от скорости насоса так же, как скоростной напор, измеряемый трубкой Пито, от скорости ее перемещения в воде, то при равенстве двух указанных давлений по скорости насоса можно определить скорость судна, а по числу оборотов насоса - пройденный путь. 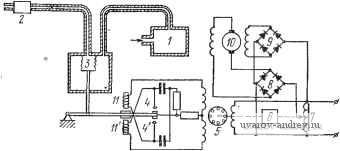 Рис. 1.28. Система измерения скорости судна. Сравнение давлений осуществляется сильфоном 3. Во внутреннюю полость сильфона подается скоростной напор от трубки Пито, а во внешнюю - давление от центробежного насоса. Если эти величины отличаются друг от друга, то сильфов, расширяясь или сжимаюсь, замыкает контакт 4 или 4 и тем самым включает соответствующую половину обмотки возбуждения индукционного двигателя 5. Двигатель через редуктор 6 перемещает движок автотрансформатора 7, питающего через купроксные выпрямители 8 и 5 двигатель постоянного тока Ю. Скорость вращения двигателя изменяется, а вместе с ней изменяется и давление, создаваемое насосом. Для осуществления пропорционального управления при помощи электромагнитов - создаются колебания подвижного контакта. Гироскопические приборы. Приведем примеры гироскопических приборов, в которых применена коррекция релейного действия. Рассмотрим вначале гировертикаль, являющуюся обычно измерительным устройством автопилота, которое определяет углы тангажа и крена самолета. Схематическое изображение гировер- 1 2 3 4 5 6 ... 57 |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |