


|
|
|
|
Главная страница » Электрика в театре » Автоматические релейные системы 1 ... 26 27 28 29 30 31 32 ... 57 денных колебаний с частотами субгармоник и что при этом внешнее периодическое воздействие частоты шв подавляет возможные автоколебания в релейной автоматической системе, навязывая ей субгармонический режим. Если же периодическое решение уравнения (7.2), изменяющееся с частотой Юо, отсутствует, то это значит, что в системе имеет место режим биений, т. е. что наряду с вынужденными колебаниями частоты шо существуют автоколебания частоты coq, отличной от частоты Юд. § 7.2. Условия существования вынужденных колебаний Условия существования автоколебаний, рассмотренные в §§ 5.3 и 5.4, определяли частоту возможных колебаний шо (в релейных системах без зоны нечувствительности) либо частоту шо и относительную длительность у (в релейных системах с зоной нечувствительности). Сдвиг фаз автоколебаний указанной частоты произволен и, как и во всякой автономной системе, определяется началом отсчета. При рассмотрении вынужденных колебаний частота их заранее задана; она равна частоте внешнего периодического воздействия. Искомыми величинами теперь являются: сдвиг фаз ф между вынужденными колебаниями и внешним периодическим воздействием (в релейных автоматических системах без .зоны нечувствительности) либо сдвиг фаз ф и относительная длительность Y (в релейных автоматических системах с зоной нечувствительности) . Этот сдвиг фаз между вынужденными колебаниями и внешним воздействием будем относить к последнему. Поэтому положим, что !И) = А!оЫ-ср), (7.3) где (йо - частота, ф - сдвиг фаз и А - максимальное значение внешнего воздействия. Здесь принято, что maxl/o(eio -ф)1=1- Если при наличии внешнего периодического воздействия в системе имеют место вынужденные колебания, то входная величина релейного элемента будет изменяться также периодически и будет зависеть как от внешнего периодического воздействия f{t), так и от выходной периодически изменяющейся величины линейной части системы z{t), т. е. (0 = 4оЫ-ф)-2(0-- (7.4) Уравнение релейной автоматической системы (7.2) в этом случае примет вид или L {Z {t)} = W{p)L{0[A~fo W - ф) - zit); aj}, (7.5) L {X (t)} = AL {Afo Ы - Ф)} - r (p) L {Ф (X (ty, a)}. (7.5) Bee переменные величины в этих уравнениях изменяются периодически с частотой шо- Решение уравнений (7.5), (7.5) должно удовлетворять условиям существования, которые зависят от вида характеристики релейного элемента Ф{х{1);а). Эти условия в общей форме были использованы при построении переходных процессов (глава III), а частный их случай (5.50) -(5.52) применялся при исследовании автоколебаний (§ 5.4). Условия существования относятся ко входной величине релейного элемента, т. е. к управляющему сигналу x{t), и поэтому справедливы как для автоколебаний, так и для вынужденных колебаний. В случае автоколебаний управляющий сигнал зависит лишь от выходной величины линейной части z{t) (5.35) В случае же вынужденных колебаний управляющий сигнал зависит не только от выходной величины линейной части системы z{t), но и от внешнего периодического воздействия Afoicuot - ц,). Следовательно, условия существования вынужденных колебаний заданной частоты можно найти из (5.50) - (5.52), подставляя вместо x{t) его значения из (7.4). Проделывая это и деля неравенства для производных на положительную величину шо, что, очевидно, не изменит пх смысла, найдем условия существования вынужденных колебаний частоты (Оо в следующей форме: для релейных автоматических систем без зоны нечувствительности СОо (7.6) И х(0 = Л/о(соо^-ф)-2(0>-Ио, 0<<. (7.7) При положительном гистерезисе хо>-.0, а при отрицательном гистерезисе ио < О, Для релейных автоматических систем с зоной нечувствительности -Ш = о(я-ф)-.-()<0. (y ) Fc (Тя - Ф) - 2 (у -) = Яхо, (7.8) (7.80 X (t) = Afo Ы - Ф) - Z it) > Ыо, 0<t<y Яхо>х(0 = ЛЬ(соо/-ф)-2(0>-Хо, y<t<-. (7.9) При положительном гистерезисе 0<Яо<1, а при отрицательном гистерезисе > 1, хо > 0. В этих условиях fo означает производную fo(a)o -ф) по act, т. е. по аргументу. Если в приведенных выше условиях положить А = О, что соответствует отсутствию внешнего воздействия, то мы получим уже известные условия существования автоколебаний. Услой'йя (7.6), (7.7) позволяют определить значения Л и ф, а условия (7.8), (7.80, (7.9)--Л, ф и у, при которых возможны вынужденные колебания заданной частоты. Этим условиям, т.е. условиям надлежащего момента переключения, надлежащего направления переключения и отсутствию дополнительных переключений можно дать наглядную физическую интерпретацию, несколько отличную от той, которая приводилась при рассмотрении автоколебаний. Предположим, что в релейной автоматической системе имеет место периодический режим, а именно режим вынужденных колебаний частоты щ, равной частоте внешнего воздействия. Тогда все величины, характеризующие cqctohhhc релейной системы xit), у it), zit), будут изменяться так же периодически и с той же частотой шо (рис. 7.2, а, б,в). При этом выходная величина релейного элемента у it), если в нем отсутствует зона нечувствительности, представляет собой последовательность импульсов длительности -, постоянной высоты fep и чередую- Щихся знаков (рис. 7.2,6). Эта последовательность импульсов, не зависящая от формы входной величины релейного элемента 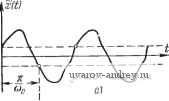 x{t) (рис. 7.2,a), воздействует на линейную часть и вызывает периодическое изменение ее выходной величины z{t) (рис. 7.2,в). Разность внешнего периодического воздействия Л/о(а)о^ -ф) (см. рис. 7.2, г) и выходной величины линейной части z{t) определяет собой входную величину релейного элемента, т. е. управляющий сигнал x{t). Если можно подобрать такие значения Л и ф, чтобы.x(f) удовлетворяло балансу фаз, о котором речь была в § 5.3, то в системе возможны искомые вынужденные колебания. Выписывая условия баланса фаз в аналитической форме, мы придем к условиям существования вынужденных колебаний (7.6), (7.7). Если подставить в условия (7.6) - (7.9) выражения, которые были приведены в § 5.2, то эти условия можно представить в явной форме. Однако в этом нет необходимости, так как далее будет показано, что условия существования вынужденных колебаний могут быть определены непосредственно по годографам релейных систем, применявшимся для исследования автоколебаний. О
§ 7.3. О сложных видах вынужденных колебаний Рис. 7.2. К определению условий су ществоваиия вынужденных колебаний. Сложные виды вынужденных колебаний, как и автоколебаний, характеризуются тем, что повторение их формы происходит в общем случае через s переключений, кроме того, период вынужденных колебаний может быть также кратен периоду внешнего воздействия. При наличии внешнего воздействия управляющий сигнал равен £(0 = Л/о(сйо;-ф)-2(0, где z{t) определяется выражениями, приведенными в § 5.5. Подставляя это значение x{t) в соотношения (5.64) и (5.64), получим условия существования вынужденных колебаний сложной формы в релейных системах без зоны нечувствительности. При нечетном числе переключений s внутри полупериода: 1) Условия надлежащих моментов переключений: () = о(я-ф)-2(1 (7.10) (y> = о (v. - Ф) - 5 (у, -Ко, х(у1) = Л/о (Y/я - Ф) - г (уг = (- 1) Ко. (y- 1) = (y.-i - ф) - г (y.-, = Ко; 2) условие надлежащих направлений переключений (после деления неравенств на соо): J л, СОо -) = лГ(я-ф)--1-()<о, 1 л Лfo(Y.я-ф)-g-(Y.)](-i)>0,
(7.100 СОо х- (v.- t) = (т.-.Я-Ф)-- (y..-. t) > о- При четном числе переключений s внутри периода: 1) условия надлежащих моментов переключений: (5) (2я - ф) - г () == Ко, (yi ) = fo(Yi2K - Ф) - Z (yi = -Ко. {V) = (г2я ~ ф) ~ г (у/=- (-1) Щ, X(y.-i ) Afo (y,-i2jt - ф) - z (y/ j = - Ко, (7.11) 2) условия надлежащих направлений переключения (после деления неравенств на соо) --(5) = ЛГИ2я-,)-.-()>0, (v. f) {Ъ2п - ф) - S- (y, ) < 0. соТ^- (V ) (Ъ2п - Ф) - i (v. 5)] (-i) > О, (V-. )-fo{Y.-,2k - Ф) - g-(v.-. ) < 0, причем Ко > 0 при положительном гистерезисе, хо < О при отрицательном гистерезисе и kq = О, если гистерезис отсутствует. Помимо этих условий, управляющий сигнал не должен иметь дополнительных переключений. § 7.4. О несимметричных вынужденных колебаниях Несимметричные вынужденные колебания могут возникнуть в тех случаях, когда наряду с внешним периодическим воздействием /4fo(coo -ф) к релейной системе с устойчивой линейной частью приложено дополнительное постоянное воздействие fu, либо когда характеристика релейного элемента не симметрична, а линейная часть системы нейтральна. В первом случае управляющий сигнал равен X it) = f + /If n (coo - Ф) - г it). (7.12) Принимая во внимание (5.67) и (5.71), представим (7.12) в виде X it) = f п ~ Уоо (0) + A~f, (со ; - ф) - г, (/). (7.13) Воспользовавшись условиями (5.73), (5.73) и (7.13), находим условия существования этих несимметричных вынужденных колебаний в виде: 1. Условия надлежащих моментов переключения: или ЛоГо (2п - ф) - г, (-1 = - f + Ко -f yoWo (0), Ado (yi2n - Ф) - г, (у, ) = - L - Ко + yoWo (0). 2. Условия надлежащих направлений переключения (после деления на соо): L i- (] = аГо (2я - ф) - -L - (] > О, (7.14) Кроме того, x{t) не должно иметь дополнительных переключений. Уравнения (7.14) при заданных значениях Л и со определяют величины Yi и Ф- Если при этом удовлетворяются неравенства (7.14) и отсутствуют дополнительные переключения, то найденные Yi и ф определяют режим вынужденных колебаний. Во втором случае управляющий сигнал по-прежнему определяется выражением (7.12). Принимая во внимание (5.81), представим его в виде X (t) = /п - 0 + Afo Ы - ф) - Z2 (t). (7.15) Воспользовавшись теперь условиями (5.80), (5.80) и (7.15), получим условия существования несимметричных вынужденных колебаний в следующем виде: 1. Условия надлежащих моментов переключения: СОо = - 0. или л/о (2я - ф) - Z2 () = - f -f Zo -f Ко, л/о(Yi2 - ф) - Z2 (yi-) = - fn + 2o- Ко- (7.16) 2. Условия надлежащих направлений переключения (после деления на соо): СОо СОс (v.)-4o(VI2я-Ф)-i2-()<0. (7.16) Кроме того, i(/) не должно иметь дополнительных переключений. Уравнения (7.16) при заданных значениях Л и соо определяют величины zq и ф. Если при этом удовлетворяются неравен- ства (7.16) и отсутствуют дополнительные переключения, го найденные Zo и ф определяют режим вынужденных колебаний. Как будет показано далее, находить yi и ф (либо го и ф) можно по годографам релейной системы /(со), /у(со) (6.9), (6.10), которые использовались при исследовании автоколебаний. § 7.5. О вынужденных колебаниях в связных релейных системах Предположим, что к связной релейной автоматической системе приложено одно периодическое воздействие частоты coq. Без ограничения общности будем считать, что fi it) = Alt о, (соо^ -Ф,), f,(0==0, 3. .... Л/. В этом случае управляющие сигналы будут равны (7.17) Xi (0 = ifoi Ы - (р) - Xk{t) = - Zk{t), k = 2,3.....N.\ Пользуясь условиями (5.85), (5.85), получаем условия существования симметричных вынужденных колебаний: 1. Условия надлежащих моментов переключений: ~ I п\ Хх (-) = /lifoi ( -Ф1) -Z, = - <01. = -хоь /г = 2, 3, N. (7.19) 2. Условия надлежащих направлений переключений (после деления на соо): СОо JL ~ СОо^й г(1) = лл.(я-Ф.)-гШ<о. (7.19) Кроме того, должно соблюдаться условие отсутствия дополнительных переключений. Уравнения (7.19) при заданных A\i, соо определяют величины ф1 и ttft, при которых возможны вынужденные колебания частоты. Если при этом удовлетворяются неравенства (7.19) и отсутствуют дополнительные переключения, то найденные значения ал и ф1 определяют режим вынужденных колебаний частоты СОо. § 7.6. Условия существования субгармонических колебаний Субгармонические колебания представляют собой вынужденные колебания, частота которых меньше частоты внешнего воздействия в целое число раз. Обозначим частоту субгармонических колебаний через соо, а частоту внешнего воздействия через сов, так что СОв = vcoo, Рде V - целое число. В этом случае = Лf о (7.20) и значит, управляющий сигнал теперь будет равен x{t) = Afo{va(-ci>)-z{t). (7.21) Возможный характер изменения x{t), y{t), z{t) при наличии субгармонических колебаний частоты СОо изображен на рис. 7.3 для случая v = 3. Поскольку теперь, как видно из (7.20), f(/) = vcooЛf(vcoo-ф), (7.22) то условия существования субгармонических колебаний получаются из условий существования вынужденных колебаний (7.6) -(7.8) простой заменой:
Рис. 7.3. К определению условий существования субгармонических колебаний' нечетного порядка (v=3). Го(я -ф) Го(я -ф) f (юо/ -ф) f (VK -ф), Vp (VK-ф), f (voo - ф). (7.23) Таким образом, мы получаем 1. Условие надлежащих моментов переключения: Ш = Fo(vя-ф)-г() = -Ko. 2; Условие надлежащего направления переключения деления на соо): - х~ \ - == Avf {т - ф)--z~\- <0. (7.24) (после (7.24) 3. Условие отсутствия дополнительных переключений: x{t) = Afo{v(i) - (p) - z{t)>-Ko, 0<t< СОо (7.24 ) В этих условиях Хо > о соответствует положительному гистерезису, а Хо < О - отрицательному гистерезису. Из симметричности колеба- 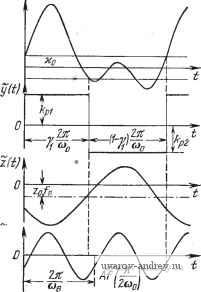 ПИЙ следует, что (7.25) Но из (7.21) при = 0, = iL СОо получаем (0) = ЛГо(-ф)-г(0), \ <Оо/ Складывая эти равенства и учитывая (7.25), получим после сокращения на А Го(-Ф) + Г(я-Ф) = 0. (7.26) Это равенство может выполняться только при нечетном v. Таким образом, в рассматриваемом случае возможны субгармонические колебания только нечетного порядка: соо = -, v=l, 3, 5, ... В релейных системах с несимметрией возможны субгармонические колебания как нечетного, так и четного порядка. Возможный характер субгармонических колебаний при v = 2 изображен на рис. 7.4. Условия существования субгармонических колебаний в этом случае получаются из условий существования несимметричных вынужденных колебаний (7.14), (7.14) или (7.16), (7.16) заменой Рис. 7.4. К определению условия существования субгармонических колебаний четного порядка (v=2). fo (2я - ф) fo (У|2Я -ф) Го(2я-ф) fo(Yi2K -ф) на о(2я -ф), на fo(Yiv2K -ф), на vf(v2K -ф), на v/J(y,v2K -ф). 1 ... 26 27 28 29 30 31 32 ... 57 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |