


|
|
|
|
Главная страница » Электрика в театре » Алгоритмы многогранных поверхностей 1 ... 17 18 19 20 21 22 23 На изображении объемной формы имеется очерк. Последний является главным моментом в зрительном восприятии. Работа зрительного аппарата при слежении глазом за линией носит статистический характер (если линия прямая, то при переходе от точки к точке изменения количества информации очень малы). Всякий излом, особая точка на линии являются узлом энтропии и, следовательно, узлом информации. Отсюда следует вывод о том, что чем больше точек включено во внешний очерк, тем больше информации он несет.Причем информация об объекте будет более достоверной, когда каждая узловая точка очерка каким-то образом связана с точкой или точками внутри фигуры очерка. Приведенный вывод согласуется с результатами естественных экспериментов, проведенных при эвристическом моделировании критериев^ оптимизации. Учитывая изложенное, а также статистику экспериментов, можно сформулировать следующие критерии оптимизации. I критерий. Количество информации на изображении максимизируется путем выбора такого проецирующего аппарата, при котором число видимых инциденций оригинала наибольшее при условии минимально возможного расхождения между числом конструктивных точек в очерке и точками, связанными с ними. При этом конструктивными точками очерка считаются те, в которых линия меняет направление (точки излома очерка). II критерий. Пропорции перспективного изображения приближаются к пропорциям оригинала в плане при условии сохранения угла зрения в допустимых пределах. Для выявления функции цели введем начальные приближения, используя установочный чертеж для построения перспективного изображения. Начальные приближения включают выявление исходных параметров, от которых зависят критерии оптимальности. Эти параметры можно выявить с помощью рис. 89, а. Положение картинной плоскости выбирается так, чтобы ее горизонтальный след О'у' был наклонен под углом а к одной из осей координат и проходил через точку А плана оригинала, имеющую наибольшие координаты. От этой точки оригинала перпендикулярно следу картинной плоскости откладывается расстояние р =(1,5-4--2,5) R, где R -. наибольшее измерение объекта. Такое расстоя-, ние обеспечивает угол нормального зрения. На указанном расстоянии проводится прямая, параллельная горизонтальному следу картинной плоскости. На этой линии (она может быть прямой, кривой, заданной уравнением или дискретным рядом точек) нахо- -дится точка стояния S. Перемещая S по прямой SS (рис. 89, б), можно получить перспективы с различной сложностью очерка. Точки Si и Sa соответствуют в нашем примере вырождению на изображении одного из фасадов. В процессе перемещения точки стояния по прямой положение картинной плоскости остается неизменным. Можно сделать вывод, что функция цели, обеспечивающая первый критерий оптимальности, зависит от параметра S. лог Риг. 89. параметры оптимизации перспективы: а - начальное приближение; б - процесс оптимизации Если же закрепить точку стояния Sq, обеспечивающую Ф^, и менять угол а, то, как видно из рис. 89, б, очерк изменяться не будет, но будут меняться пропорции на изображении по сравнению с пропорциями оригинала (в плане). Значит, функция цели, обеспечивающая второй критерий оптимальности, зависит от параметра а. Итак, мы имеем две функции цели, не зависимые одна от другой. Функции цели имеют следующие выражения: Ф1=Ф.+Ф.+ > где - число точек на очерке; ф а - число видимых инциден-ций, связанных с конструктивными точками очерка; 8 - малая величина, вводимая в машинную программу для устранения случаев деления на нуль. В процессе оптимизации эта функция максимизируется: Ф, = шах[ф, + ф, + --i-;. Для второй функции цели /о где I, d - измерения оригинала в плане; /р, d - измерения изображения в плане; а - угол наклона горизонтального следа картинной плоскости к одной из осей координат. в процессе оптимизации эта функция минимизируется: ?2 = Him Процесс оптимизации делится на ряд этапов. 1. Начальное приближение включает задание исходных данных (параметров) для оптимизации. Этот этап можно проследить на рис. 89, а. Высота горизонта Zq назначается заранее, исходя из реальных условий наблюдения, и не меняется, если в процессе оптимизации в этом нет необходимости. Положение, картинной плоскости выбирается так, чтобы ее горизонтальный след был наклонен под углом а к одной из осей координат и проходил через точку плана, имеющую наибольшие координаты. При этом неважно, где находится 1артинная плоскость: перед оригиналом. (Начало) г- Зц*1-*3, ОпреЗелеиш видимости на изображении r-FO Вычисление 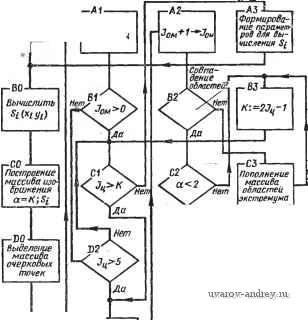 I-E1 Построение кусочно-ли-аеинои модели отсчетов r-F1 J Выделение области зк-стремальноео значенияФ-
функция 02 обслуживается аналогично. Вместо Si вычисляется ; затем {1р;<{р;Фр} Рис. 90. Схема алгоритма оптимизации перспективы за оригиналом или внутри него. На расстоянии р проводится прямая, параллельная горизонтальному следу картинной плоскости. Перемещая точку S по прямой SSg, можно получить перспективы с различной сложностью очерка. . 2. При изменении положения точки S на прямой SSg максимизируется функция Ф1. 3. При изменении угла а минимизируется функция Фа. Причем угол изменяется таким образом, чтобы угол зрения (нормальный) не выходил из пределов допустимого (как по горизонтали, так и по вертикали). Для поиска экстремумов функций весьма эффективен упомянутый ранее метод поиска абсолютного экстремума функции, пред- ложенный в работах Д. И. Батищева. В случае поиска экстремума функции Ф^ интервалом, в котором вычисляются значения функции, является отрезок SS. Схема алгоритма оптимизации перспективы, выполненная на уровне стандартных подпрограмм, показана на рис. 90. Работа алгоритма ясна из схемы. Программный символ F1 изображает стандартный оператор, вычислякщий интервал исследуемой функции. Изложенный процесс мало чувствителен к изменению формы картинной поверхности и траектории перемещения центра проекций. При незначительных изменениях алгоритм можно приспособить к процессу оптимизации функции Ф^.при условии изменения аппликаты центра проецирования (абсцисса и ордината центра остаются постоянными). На рис. 89, б показан пример графика функции Ф^. 4. АЛГОРИТМИЧЕСКАЯ ОПТИМИЗАЦИЯ АКСОНОМЕТРИЧЕСКОГО ЧЕРТЕЖА Аксонометрические чертежи применяют в различных областях промышленности и при их зрительном воприятии наибольшую роль также играет информационный аспект. Аксонометрия обычно дополняет комплексный чертеж и строится в тех случаях, когда чтение чертежа затруднено из-за случаев вырождения некоторых элементов (например, плоскость выродилась в линию, линия выродилась в точку и т. п.), а также в случае сложности оригинала. Возможность получения аксонометрических чертежей автоматически расширяет сферу их применения, и они начинают играть самостоятельную роль (например, при проецировании кузова автомобиля, фюзеляжа самолета). Алгоритмы построения аксонометрии позволяют изменять проецирующий аппарат. При неудачном выборе последнего вырождение инциденций может привести к неполноте аксонометрического чертежа и к.потере возможности использовать этот чертеж как орудие исследования. Изложенное позволяет сделать вывод, что невырожденность инциденций оригинала на аксонометрическом чертеже является одним из критериев его оптимальности. Из геометрической схемы на рис. 91 a,lXt у ill) 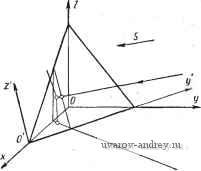 Рис. 91. Геометрическая схема аксонометрического чертежа ВИДНО, что параметром, определяющим данный критерий, является направление проецирования. В самом деле, выбирая направление проецирования не параллельным ни одному из ребер оригинала, мы добиваемся их невырожденности. При этом положение плоскости проекций не влияет на число инциденций в изображении. Формальная модель процесса выбора оптимального направления проецирования. Пусть в оригинале (рис. 92) существует \R\ направлений, вырождение которых нежелательно (ребра многогранника, отрезки ломаных, аппроксимирующих участки кривой и т. п.). Назовем множество этих направлений кусочно-линейной моделью оригинала. Выберем в пространстве три направления, проходящие через произвольную точку О и параллельные осям системы координат Oxyz (собственная система координат оригинала). Поставим в соответствие каждому направлению из \R\ единичный вектор (модуль вектора в данной задаче нас не интересует), проходящий через точку О и параллельный рассматриваемому отрезку Ri 1}. Тогда мы получим множество векторов, исходящих из одной точки, концы которых располагаются на поверхности единичной сферы (рис. 93). Эти векторы можно разложить на составляющие по трем направлениям, причем, единственным образом. Концы проекций векторов образуют на выбранных осях координат точечные ряды. Таким образом, пространство векторов распадается на три одномерных пространства. Обратимся к этим подпространствам для выбора вектора, не совпадающего ни с одним из векторов . Легко заметить, что так как все векторы единичны, а выбираемый вектор тоже единич--ный, то задача сводится к выбору точки, отображающей проекцию конца вектора на одну из осей. Выберем на одной из осей (рис. 93) точку, отображающую проекцию конца единичного вектора направления проецирования. Так как мы хотим, чтобы направление проецирования не совпадало с другими направлениями, то и точку на оси следует выбирать не совпадающей ни с одной из отмеченных на оси точек. Если необходимо, чтобы выбираемый вектор проецирования как можно больше отклонялся от существующих векторов модели оригинала, в точечном ряду отыскивается самый большой свободный промежуток между точками, и в нем назначается точка, отображающая конец одной из проекций единичного вектора проецирования. Конец второй проекции рассматриваемого вектора назначается или подсчитывается в точечном ряду второй оси (он может совпасть с уже существующей на оси точкой).  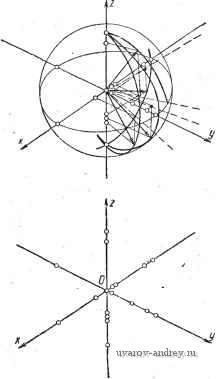 Рис. 92. Исходная модель оригинала Рис. 93. Векторная модель оригинала Конец третьей проекции находится из уравнения диагонали параллелепипеда, три измерения которого являются проекциями единичного вектора проецирования на оси координат. Очевидно, что множество точек, которые можно выбрать, бесконечно и составляет мощность континуума. Выбранный вектор не будет совпадать ни с одним ребром проецируемого тела, однако он может лежать в одной из плоскостей, ограничивающих тело. Задачу выбора вектора, не параллельного ни одной из упомянутых плоскостей, можно свести к только что изложенной задаче, если задать плоскости векторами их нормалей. Нормаль, не совпадающая ни с одной из заданных, определяет плоскость, в которой будет лежать вектор проецирования. Эта плоскость проходит через начало координат и пересекает единичную сферу по окружности, на которой будет лежать конец искомого единичного вектора проецирования. Резюмируя изложенное, можно наметить следующую последовательность выбора вектора проецирования 1. Выбирается плоскость, в которой должен лежать искомый вектор проецирования, не совпадающая и не параллельная ни одной из существующих и-представленных в векторной модели плоскостей. 2. В выбранной плоскости назначается йектор проецирований, не совпадающий и не параллельный ни одному из существующих и представленных в векторной модели ребер и интересующих нас направлений, а также не совпадающий и не параллельный ни одной из линий пересечения выбранной плоскости проецирования с плоскостями проецируемого тела. Плоскость проецирования назначается проекцией единичного вектора ее нормали по одной из осей координат, а.две другие проекции вычисляются по известным формулам при условии, что диагональ координатного параллелепипеда равна единице. Единичный вектор проецирования выбирается назначением одной из проекций, а две другие можно найти из системы уравнений Лх + Вг/ -f Сг -I- D == 0; 2 = с. Данная система предполагает, что проекция единичного вектора проецирования выбиралась по оси Oz. Назначение Коэффициентов искажения. Выбрав в предыдущем параграфе направление проецирования, обеспечивающее невырожденность граней и ребер оригинала, выберем теперь оптимальные коэффициенты искажения. В качестве критерия оптимальности при выборе коэффициентов искажения по осям возьмем информационный аспект. Как известно, коэффициенты искажения зависят от направления проецирования, поэтому можно принять проекции единичного вектора проецирования на оси координат за коэффициенты искажения. Назначив последние, можно в точечных рядах по осям отыскивать проекции единичного вектора проецирования способом, описанным выше. Психология учит, что восприятие опирается на цельность воспринимаемого объекта, на его облик. Здесь главную роль играет очерк объекта, его габаритные размеры. Введем следующую эвристику. При выборе аппарата проецирования и, в частности, положения объекта относительно системы координат необходимо сделать так, чтобы к началу координат были обращены более бедные в информационном отношении грани (этот процесс можно организовать автоматически, пользуясь описанием габаритных размеров). Тогда к зрителю будут обращены наиболее богатые в информационном отношении грани. В параллельной аксонометрии дело облегчается тем, что существуют проверенные многолетним опытом стандартные аксонометрические системы, которые отличаются тем, что при стандартных коэффициентах искажения обеспечивают хорошее качество восприятия объекта по его изображению. Но стандартных аксонометрических систем несколько, и каждую из них можно выбирать в зависимости от расположения наиболее богатых в информационном отношении граней оригинала. Назовем число, показывающее количество размеров, отсчитывае- мых в плоскостях, параллельных плоскости габаритного размера, сложностью габаритного размера. Тогда появляется возможность проводить оптимизацию в два этапа: 1) выбор исходной стандартной аксонометрии в зависимости от сложности габаритных размеров; 2) в случае вырождения инциденций выбор возможно близкого к стандартному (но удовлетворяющего критерию невырожденности) аппарата проецирования. В итоге оптимизации будем иметь аксонометрический чертеж, близкий к исходному стандартному и удовлетворяющий критерию невырожденности. Определение коэффициентов искажения по осям на оптимальном аксонометрическом чертеже. Алгоритмы автоматического получения и оптимизации аксонометрического изображения преду-см§.тривают получение чертежа, на котором можно выполнять изь!ерения. Для этого из ЭЦВМ выводятся числовые значения коэффициентов искажения по осям, а также углов между координатными осями на аксонометрическом чертеже. Используется геометрическая схема (рис. 94), представленная Е. А. Глазуновым и Н. Ф. Четверухиным в их работе Аксонометрия . Коэффициенты искажения по осям вычисляются по формулам:
sin Ф 21 .£ 2cosp , I -CT, 2 rf, Sin Ф £2lPi.. sin Ф cos у I sin Ф В косоугольной аксонометрии картинная плоскость параллельна одной из координатных плоскостей. Пусть, например, плоскость П' задана уравнением Ах -\- D =0. Тогда коэффициент искажения по оси Ох можно определить по приведенной формуле, где = О, так как это угол между нормалью к картинной плоскости и осью Ох, а в данном случае Ох сама является нормалью. Отсюда cos = = 1. Значит, угол ф определится по формуле , 81Пф=± Л Icos а + cos2 р + cos? Y Для коэффициентов искажения по осям Оу и Oz cos Pi = 0; cos Y] = 0, откуда v = I; w =\. Определение углов между осями координат на оптимальном аксонометрическом чертеже. Геометрическими схемами для определения углов между осями на изображении служат схемы, приведенные на рис. 95. Исходными данными для решения задачи является направлениепроецирования, найденное в процессе опти- 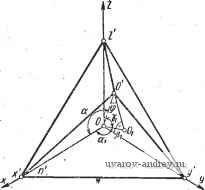  Рис. 94. Геометрическая схема определения коэффициентов искажения Рис. 95. Геометрическая схема определения углов между осями в аксонометрии мизации, И ка1Этинная плоскость, заданная уравнением в общем виде. В ходе решения необходимо определить длины прямых О'х', О'у', Oz, каждая из которых проходит через известные две точки: О' (х, у, г) и одну из точек на оси координат X (с, О, 0), Y (О, Ь, 0); Z (О, О, с): О'Х' =V{x-af + y + \ . . OZ = YTY+V-W- Обратимся к рис. 95. Углы между осями координат на изображении определятся по формулам 2 р,-х'у' 2 Pi - xy р,-х'г' 2 - р,-г'у где / {Pi-0x)(Pi-0y)(Pi-xy) Pi Pi = -f (OV + Oy+xY). . Аналогичные формулы получаются для г2; р^; г^; р^. Вычислив отрезки Ох, Оу, Oz на изображении осей, можно получить коэффициенты искажения как отношение аксонометрического отрезка к натуральному: О'х' Ох О'у' О'у' . Оу ~ b W = Oz Oz Кусочно-линейные модели - это параметрические модели оригинала, состоящие только из плоскостей и прямых линий, включающие столько параметров, сколько необходимо для решения конкретной задачи оптимизации аксонометрического чертежа. Число этих параметров может быть большим или меньшим, чем количество, которое необходимо для определения формы и разме-: ров геометрического объекта. Для многогранников куеочно-линей-ной моделью является сетка, определяющая их поверхность и те дополнительные плоскости и направления, которые нас интересуют как невырожденные на изображении гранного тела. В этом случае вся поверхность и интересующие нас направления войдут в кусочно-линейную модель. В случае необходимости в кусочно-линейную модель может войти полный граф-вершин многогранной поверхности. Параметры формы определяются в собственной системе координат объекта. Если кусочно-линейная модель имеет только плоскости и направления, параллельные плоскостям и осям собственной системы координат, то эта система и является их кусочно-линейной моделью. Например, собственная система координат параллелепипеда с осями, направленными по его ребрам, является его моделью. Если мы заинтересованы в том, чтобы в параллелепипеде не выродилась диагональная плоскость, проходящая через начало координат, то в кусочно-линейную модель войдет эта плоскость, а в векторную модель единичных нормалей войдет ее единичная нормаль. При оптимизации это может привести к тому, что, например, если в кусочно-линейную модель куба включить его диагональную плоскость, которая вырождается в стандартно ортогональной изометрии, то эта стандартная проекция не будет оптимальной. Если в оригинале имеются поверхности второго порядка, то они должны быть заменены своими кусочно-линейными моделями, состоящими из плоскостей и отрезков прямых. При этом процесс такой замены должен быть очень простым для каждого вида поверхности. Собственная система координат выбирается таким образом, чтобы уравнение поверхности было простейшим, и тогда она будет являться кусочно-линейной моделью такой поверхности. Если на поверхности имеются какие-либо особенности, то они входят Б модель в виде плоскостей и направлений, не параллельных плоскостям и осям собственной системы координат рассматриваемой поверхности. 5. КОНСТРУИРОВАНИЕ КАК ПРОЦЕСС И КАК СИСТЕМА Последние годы характеризуются возрастающим интересом к изучению процесса конструирования и увеличением публикаций . в этой области. Подавляющее большинство авторов занимается уточнением методики конструирования, ее рационализацией. 1 ... 17 18 19 20 21 22 23 |
|||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |