


|
|
|
|
Главная страница » Электрика в театре » Алгоритмы многогранных поверхностей 1 ... 16 17 18 19 20 21 22 23 {начало) 02ПОШ01И001 Поиск кодов сто -рон угла.Форми-рование a-,;ai2 -Г® Лисгп№1 А1 2Si E A2i--Г
 
-1-ад, (уголср-вне тела ) Нет сторона образме-реиа? 1-. сторона овразме-рена! нет r-F3-.-, - Присвоение одще му для сторон ог\ р„ раничению меткА I центра: х^у^ \ 1 ХнЗУн^аху! Нет   ,-G4 Рис. 84. Алгоритм размещения размеров угла: Ф - измеряемый угол; Р = -Jl признак пересечения либо объединения областей; минимально необходимый для размещения по дуге разйерной линии размерного числа угла ф; л^, х^, х^, х^ - координаты Точек сторон li, 1; 1 - длина отрезка, состав- Лист ml  - рабочие ячейки; a.j - ячейки, у котсых J равно содержанию счетчиков: Rgi - (радиус размерной линии); 1 - длины отрезков на чертеже, составляющие стороны ляющего сторону угла ф с номером J, равным содержанию счетчика {начало)
Присвоение размеру метЛ ки впесенногщ нет В тело 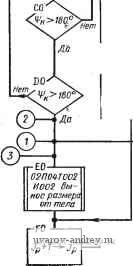  Внесен ли преды-ВтЕЛо^>-\ дущий размер В тело? Линейный размер  (конецЛ /Размер дуги  Рис. 85. Схема оператора размещения линейного размера: - счетчнк обпяшр.нття к nnpnflTnnv - счетчнк обращения к оператору На выбор схемы нанесения размера в случаях, когда угол пустой (расположен вне тела проекции) влияют величины углов ярн, фк, составленные между сторонами измеряемого угла-и отрезками, смежными им в контуре. Применение углов ip, яр^ понятно из схем. В заключение необходимо отметить, что оператор может оказаться неработоспособным, когда в смешанном массиве (из угловых и других размеров) первым идет угловой размер. При кодировании необходимо избегать постановки такого размера первым в массиве. Алгоритм оператора 02П04Т002 (рис. 85). Оператор реализует две типичные альтернативы: вынос размера за пределы внутренности контура (в дальнейшем именуется - вынос от тела) и ввод размера внутрь области проекции, ограниченной контуром (ввод
 I--1-; r-10. U >iol
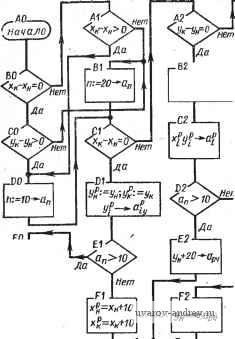
хыгхк uf  Нет Х^=Хя 1х Нанесение метки Выноса .30. A4J- уЧ=Ук-у г-64. (нонец^ Рис. 86. Схема, оператора вычисления параметров размерной сети в случае выноса линейного размера В тело). Тактика выбора альтернативы зависит от величин углов фн! Фк> которые вместе с нижними индексами позволяют оценить геометрическую ситуацию в окрестности измеряемого отрезка. Следует отметить, что можно представить себе такой контур, в котором любое сочетание обсуждаемых альтернатив не приведет к выполнению исходных эвристик недопущения пересечений. Во всех случаях оператор моделирует поведение человека в ходе решения такой задачи и обеспечивает минимум нежелательных пере- сечений. Расчет размерной сети после выбора альтернативы проводится операторами 02П04Т002И001, И002, ИООЗ. Первый из них определяет величины углов фд-, г]; по координатам точек измеряемых отрезков. Исполнительные операторы 02 и 03 вычисляют параметры размерной сети при реализации указанных выше альтернатив Схемы, реализующие алгоритмы этих операторов, мало отличаются друг от друга. На рис. 86 приведена Схема оператора 02П04Т002И002, осуществляющего расчет в случае выноса размера от тела . Из схемы рис. 85 видно, что анализ ситуации при выборе альтернативы состоит в оценке величины углов и соотнесении их друг другу. Критериями проверки являются величины углов 90, 180, 270°. Углы 90 и 270° важны потому, что отрезки, наклоненные друг к другу под такими углами, могут совпадать с выносными либо размерной линиями. Угол 180° является граничным, переход за эту величину является переходом в контуре либо к выступу, либо к впадине. Из анализа той же схемы видно, что все размеры выпуклого контура будут вынесены от тела. В заключение отметим, что особенностью оператора ИООЗ является проверка при вводе размера в тело наличия пересечений. В случае появления пересечений управление получает комплекс оптимизации размещения.Описание методов оптимизации и некоторых алгоритмов этого комплекса имеется в гл. VII. rflaeaVII. ОПТИМИЗАЦИЯ ПРОЦЕССОВ ПРИ АВТОМАТИЧЕСКОМ РЕШЕНИИ НЕКОТОРЫХ ЧЕРТЕЖНО-КОНСТРУКТОРСКИХ ЗАДАЧ I. ВВЕДЕНИЕ В ПРОБЛЕМУ Выше указывалось, что параметры, определяющие обрабатываемую информацию, являются константами, которые можно. изменять, не нарушая работоспособности алгоритмов. Такое изменение можно проводить по какому-либо закону, последовательно вводя в алгоритм новые величины. Если применить такой процесс, например, в алгоритмах построения изображения, то можно получить множество изображений одного и того же объекта, отличающихся друг от друга, или различно организованные размерные сети и т. д. Такого рода результаты можно использовать, по крайней мере, в двух аспектах. 1. Получение серий изображений с целью их последовательного просмотра либо получения мультипликационного фильма, показывающего объект в движении. Известны отечественные работы в этом направлении. Зарубежные работы в этой области также многочисленны. 2. Использование возможностей изменять результаты, полученные автоматически, для выбора наилучшего в определенном смысле. Это и есть процесс оптимизации выводимого из машины результата. Рассмотрим некоторые особенности процесса оптимизации. Оптимизация применяется обычно в тех системах и элементах, которые связаны друг с другом через взаимодействие, направленное на достижение некоторой цели либо целей. Математическое моделирование таких взаимодействий идет обычно через разработку критериев оптимизации, направляющих процесс и разработку функций цели. Сам процесс оптимизации обычно включает в себя поиск глобального экстремума функции цели. Значение параметров этой функции, при которых достигается экстремум, является выходом процесса оптимизации. Рассматривая оптимизацию задач графического конструирования, следует отметить, что здесь весьма сложной является задача выделения, формулирования и математического моделирования крите- риев оптимизации и параметров, объединяющихся в функцию цели. Обращаясь к интуиции, можно сказать: наиболее наглядное изображение или наиболее удобное размещение размеров. Однако до математической модели здесь весьма далеко и приходится применять метод эвристического моделирования. Такое моделирование в случае процесса оптимизации включает в себя обычно следующие этапы: 1) выделение критериев оптимизации методом итерационного эксперимента с группой экспертов; 2) выделение параметров, определяющих состояние объекта, которое может быть оценено с точки зрения критериев, методом математического моделирования; 3) разработка функции цели, связывающей параметры, и анализ ее основных свойств с точки зрения поиска экстремума (унимодальность, непрерывность - и т.д.); 4) выбор вычислительного метода поиска глобального экстремума функции цели; 5) разработка алгоритма автоматического процесса оптимизации. Следует отметить, что не во всех случаях приходится проходить все отмеченные этапы. Иногда процесс организуется на специальных геометрических моделях (см., например, оптимизацию аксонометрического чертежа). 2. ОПТИМИЗАЦИЯ ПРОЦЕССОВ РАЗМЕЩЕНИЯ ГЕОМЕТРИЧЕСКИХ ЭЛЕМЕНТОВ НА ПЛОСКОСТИ Рассмотрим методику оптимизации обсуждаемого класса задач на примере оптимального размещения размерного прямоугольника при автоматическом нанесении размера. Изложенные выше программы позволяют получить допустимые в смысле удовлетворения требованиям ГОСТ решения задачи размещения и нанесения размера. Опыт показывает, что требования ГОСТ позволяют получить множество допустимых решений для одного и того же размерного графа. Возникает задача определения наилучшего решения, удовлетворяющего некоторым критериям оптимальности. Рассмотрим эти критерии, которые были выделены в ходе эвристического моделирования. Оптимальным можно считать одно из допустимых решений, которое удовлетворяет следующим критериям: а) размерная надпись должна находиться в непосредственной близости от измеряемого элемента на чертеже; 6) число пересечений линий, вводимых при нанесении размера, с ранее нанесенными линиями чертежа должно быть минимальным. Легко видеть, что соблюдение этих требований дает согласованное с рекомендациями ГОСТ 2.307-68 решение, что на практике обеспечивает чертежу ясность и приводит к ускорению его чтения. Дальнейшее изложение проводится на примере размещения размерного прямоугольника при выносе размера на полку, что характерно для современных технических чертежей. Уместно заметить, что этот случай наиболее сложен, так как число возможных альтернатив здесь велико. Описываемая методика может бьггь использована и в других ситуациях. Напомним, что под размерной сетью мы понимаем совокупность линий, необходимых для размещения размерной информации на чертеже. Процесс автоматического нанесения размера включает в себя определение параметров выносных и размерной линий, а также размещение символов, входящих в размерную надпись. Для оценки критерия а введем параметр а (а) - длину выносной линии (рис. 87), который может изменяться при изменении угла а наклона выносной линии. Минимальное значение с^т этого параметра равно рекомендованному ГОСТ (здесь принято с^т = 5 мм). Если пересечений не возникает при а (а) = а^, то задача решена. Может случиться, что при отсутствии пересечений а (а) =h ст-В этом случае а (а) равно длине выносной линии до места на чертеже, где может бьггь размещена полка с размерной надписью. Однако часто встречаются ситуации, в которых при фиксированном а выносная линия и полка с размерной надписью не могут быть размещены без пересечений с другими линиями чертежа, В таких ситуациях необходимо учитывать и выполнять критерий б. Введем классификацию типов пересечений линий размерной сети с другими линиями на чертеже. Эти типы пересеченийприве-дем в порядке возрастания штрафа за появление на чертеже того или иного пересечения в зависимости от степени его нежелательности. 1. Пересечение со вспомогательной линией построения. 2. Пересечение с осевой либо центровой линией. 3. Пересечение с линией невидимого контура. 4. Пересечение с линией видимого контура. 5. Пересечение с размерной линией. Решение, имеющее в своем составе пересечения выносной линии с выносной или символов размерной надписи с любой другой линией чертежа либо символом, считаются недопустимыми. Для эффективного выявления пересечений введем понятие полосы. Полосой назовем область чертежа, где необходимо выявить пересечения при нанесении размера. Полоса позволяет сужать поле поисков пересечений и экономить машинное время, В нашем случае полоса ограничена линиями, параллельными выносной и касающимися противоположных вершин размерного прямоугольника. Ширина полосы б зависит от угла а, а также от длины / полки (рис. 88). Наличие пересечения в полосе будем характеризовать следующими двумя параметрами: - число пересечений -го типа (й == 1, 2, 3, 4, 5 - порядковый номер типа пересечения в приведенном выше списке), фд, - штраф за появление одного  Рис. 87. Параметры критерия оптимизации выноса размера на полку Рис. 88. Полоса проверки пересечений пересечения k-ro типа. При фиксированном а характер пересечений будем отображать числом S (а). При этом 0 - если пересечение допустимо; 1 - в противном случае. S(a) = Если S (а) = О и а фиксировано, то решение можно характеризовать следующими двумя параметрами: а) суммарная величина штрафа, минимально возможного для данного а, при условии размещения полки с размерной надписью Ф (а) = S аФа; б) длина выносной линии, соответствующая параметру а. Таким образом, каждый угол а характеризуется тремя величинами S (а); ф (а); а (а). При изменении угла а в интервале (0; 2зх) эти параметры меняются, в связи с чем возникает задача выбора угла, который соответствует наилучшим значениям параметров. Для некоторого набора углов а^, а^, а,- введем функцию Ф ( ;): тах где Кг- К^- ; кроме того /( + i, = 1; ф (сс;); фтах тах , а (aj) - значение параметров для угла а; с„, ; а^; ф„, ; ф„ах - минимальные и максимальные значения соответствующих параметров в наборе ( 1, ау). Функция Ф (а) вычисляется при условии S (а) = 0. В случаях, когда S (а) =1, выбирается Ф (а) = 2Ф*(а), где Ф*(а) = = шах Ф (а). Таким образом, угол а выбирается путем оптимизации функции Ф (а), которая в общем случае является многоэкстремальной. Задача оптимального размещения в обсуждаемом случае сводится к отысканию глобального минимума этой функции: тшФ(а) 0<:а<:2я. Некоторые области углов а не рекомендуются для размещения выносных линий, другие являются предпочтительными. В виду этого задача оптимизации сводится к четырем задачам глобальной минимизации: min Ф (а) < а <: а|, где а\, а\ - границы допустимых интервалов углов в k-\a квадранте (k = 1, 2, 3, 4). Для решения задачи глобальной минимизации применяется метод кусочно-линейной аппроксимации, разработанный Д. И. Ба-тищевым^. Основная идея метода состоит в том, что сначала глобально исследуется структура, а затем уточняются локальные минимумы и выбирается лучший из них. Если в ходе процесса получен угол, при котором S (а) = ф (а) = О и а (а) = а^., поиск заканчивается и полученное решение принимается за оптимальное. Из найденных решений размещения в каждом из квадрантов выбирается наилучшее, считающееся абсолютным экстремумом. В заключение отметим, что реализация процесса оптимизации в конкретной задаче графического конструирования, который для этого не был формализован, потребовала прохождения всех этапов обработки, начиная с эвристического моделирования. При этом сочетаются эвристический и математический методы. Можно предполагать, что такое сочетание является одним из реальных путей решения задач, которые не могут быть решены непосредственным применением математических методов. 3. АЛГОРИТМИЧЕСКОЕ ПОСТРОЕНИЕ ОПТИМАЛЬНОГО ПЕРСПЕКТИВНОГО ИЗОБРАЖЕНИЯ Весь комплекс описанных выше алгоритмов и программ позволяет получить любое перспективное изображение на вертикальной или наклонной картинной плоскости либо аксонометрический чертеж. Но среди этого множества изображений можно выделить изображение, оптимальное в некотором смысле. Здесь наиболее сложным и важным является выбор критериев оптимальности и параметров, определяющих эти критерии. Наибольшую трудность в оптимизации составляют изображения архитектурных объектов, так как здесь присутствуют трудно формализуемые вопросы эстетического восприятия, которые зависят от эстетического воспитания, от профессионального опыта, от эвристической установки в момент высказывания мнения и т. д. Объединяющим признаком, влияющим на качество изображения, является количество информации, которое оно несет, поэтому общим критерием качества изображения можно принять информационный аспект. Известно, что природа перспективного изображения такова, что оно является геометрической моделью зрительного восприятия. Качество перспективного изображения поэтому зависит от того ощущения реальности, которое мы получим при его восприятии. 1 Д. И. Батищев принимал участие в формализации процесса оптимизации выноса размеров на полку. 1 ... 16 17 18 19 20 21 22 23 |
|||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |