


|
|
|
|
Главная страница » Электрика в театре » Свойства нелинейных систем 1 ... 5 6 7 8 9 10 11 ... 42 До сих пор не было сделано никаких предположений относительно случайного сигнала на входе нелинейного элемента. Для простоты допустим, что случайный сигнал, воздействующий на
к-У -ь --к а  niy(t) y(t)=my(t).ny(t) ,my{t) 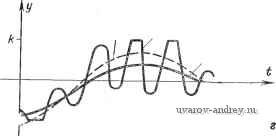 Рис. 3.1-1. Влияние насыщения на случайную переменную. систему, стационарен (т. е. статистические характеристики не зависят от времени) и имеет нормальное распределение. Значительно более сложные нестационарные и стационарные, не подчиняющиеся нормальному закону распределения, здесь рассматриваться не будут. Плотность вероятностей для стационарного нормального распределения, или распределения Гаусса - Лапласа, равна (3.1-2) где а=ах - стандартное отклонение и m = m-c -математическое ожидание, или среднее значение.
Рис. 3.1-2. Нормальная плотность вероятностей при от=0. Среднее по времени от случайного сигнала x{t) равно г =lim \x{t)dt. (3.1-3) Среднее по времени от квадрата случайного сигнала равно т 3?(7)= lim х2(/)с?/. (3.1-4) Для стационарного эргодического сигнала средние по времени совпадают со средними значениями, взятыми по соответствующим множествам: X {£) = x{t)M \х (/)], х^ (О = х^ (О = М \х^ (01- (3.1 -5) Для стационарного, но не эргодического сигнала среднее по времени отличается от среднего по множеству. На рис. 3.1-2 показана плотность вероятностей для стационарного нормального распределения с нулевым математическим ожиданием. Дисперсия, которая равна математическому ожиданию от квадрата отклонения переменной от ее математического ожидания, совпадает в указанном случае со среднеквадратич- ным ожиданием x(t) переменной (так как математическое ожидание равно нулю). Если математическое ожидание случайной переменной отлично от нуля, плотность вероятностей будет 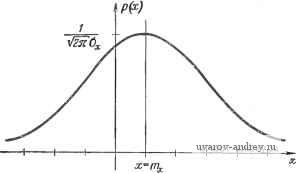 Рис. 3.1-3. Нормальная плотность вероятностей при тфО. иметь вид, показанный на рис. 3.1-3. Для стационарных эргоди-ческих процессов среднее по множеству в произвольный момент времени и среднее по времени совпадают: и т >пх= \ p{x)xdx\\m (Оdt. (3.1-6) Аналогично дисперсия равна т о\ = J (- - m,f р (х) dx = l.im J \х {£) - mf dt. (3.1-7) -со -7 При нулевом математическом ожидании /ге. = 0: т а^о= Jx2p(x)rfx = Um Jx2(0cf. (3.1-8) - оо -Т Так как х=тх-\-Пх, уравнение (3.1-7) принимает вид а^= ]n\p{x)dx. (3.1-9) Для стационарных, но не эргодических сигналов приведенные рыше уравнения не имеют места. 3.2. СТАТИСТИЧЕСКАЯ ЛИНЕАРИЗАЦИЯ НЕЛИНЕЙНЫХ ХАРАКТЕРИСТИК Статистическая линеаризация означает по существу определение приближенной линейной зависимости между выходной и входной переменными, которая соответствует рассмотренной выше физической картине. При статистической линеаризации путем замены нелинейного элемента соответствующим линейным стремятся получить с достаточной точностью полезную составляющую выходного сигнала и стандартное отклонение. В следующих разделах для упрощения обозначений символ t в функциях времени опускается, т. е. будем писать и, гпи, Пц, гПу и Пу. Для стационарных случайных процессов математические ожидания ГПу и гПи выходной и входной переменных и их стандартные отклонения ау и Ои, а также коэффициенты усиления постоянны. Первый метод. Нелинейная зависимость y-g{4) (3.2-1) между действительными выходной и входной переменными заменяется приближенным линейным соотношением i = gb + Ksn, (3.2-2) где i - идеальный выходной сигнал линеаризованного элемента; go - постоянная полезная составляющая выходного сигнала в идеальной выходной переменной г; Ks - эквивалентный статистический коэффициент усиления нелинейного элемента по отношению к случайному шуму. Связь составляющей go с полезной входной составляющей ти задается с помощью функции и (или) характеристики нелинейного элемента. Для нелинейности с центрально симметричной характеристикой среднее значение go может быть записано в виде go = /C, (3.2-3) где Км - эквивалентный статистический коэффициент усиления нелинейного элемента по отношению к математическому ожиданию (среднему значению) Следовательно, i = Кмти + К^ (3.2-4) Среднее значение go, т. е. коэффициенты Км и Кв, можно определить из предположения, что математическое ожидание гпг и стандартное отклонение 0г идеального сигнала i должны соответствовать математическому ожиданию ту и стандартному от- клонению Оу действительной выходной переменной у: tn-i = гПу, а, = Оу. (3.2-5) Так как идеальный выход i является линейной функцией от составляющих входа и, уравнения (3.1-6) и (3.1-7) или (3.1-9) дают т1до = Кмт^, = (3.2-6) С помощью этих соотношений получаем следующие статистические коэффициенты усиления: К, = mjm (3.2-7) Ks=± <уК- (3.2-8) Индекс М соответствует отношению средних значений, индекс S - стандарт ных отклонений. Отметим, что эти две простые формулы применимы только для центрально симметричных характеристик. Если функция g(u) возрастает в точке и-Ши, то /(s>0, если она убывает, то /Cs<0- Следовательно, sgn/,= sgn (3.2-9) С помощью приведенных соотношений можно точно вычислить влияние нелинейного элемента как на полезную составляющую сигнала, так и на шум. Второй метод. Рассмотрим теперь случай, когда в реальной системе управления за нелинейным элементом располагаются линейные элементы, которые фильтруют случайные сигналы на основе корреляционных функций, а не стандартных отклонений. В этом случае разумно допустить некоторую ошибку в стандартном отклонении, но зато аппроксимировать корреляционную функцию по возможности наиболее точно. Поэтому во втором методе статистическая линеаризация осуществляется наилучшим образом с помощью минимизации среднего квадрата разности между реальным у и идеальным выходным сигналом М{е^) = М[{у-1П (3.2-10) Допустим, что + (3.2-11) Тогда средний квадрат разности можно записать, используя выражение (3.1-9), в виде М (£2) = М if) + gl + KWu - 2g,m, - 2KvM (у ). (3.2-12) Запишем необходимые условия для минимума: -гЖИ=2о-2/п, = а (3.2-13) М [еП = 2Куо1 - 2М\упА = 0. (3.2-14) Так как ЖИ=2>0. жи = 24>о. жи=о, условия (3.2-13) и (3.2-14) являются также и достаточными. Следовательно, опять получаем ё-о = /?гу. (3.2-15) Но коэффициент усиления теперь равен Ку= М(п„у) = M{n;i). (3.2-16) 3.3. ВЫРАЖЕНИЯ ДЛЯ ЛИНЕАРИЗОВАННЫХ КОЭФФИЦИЕНТОВ УСИЛЕНИЯ Для определения среднего значения go и эквивалентных коэффициентов усиления Км, Ks и /(v требуется знание одномерной плотности вероятностей Р\\и, t) входной переменной. Эта плотность вероятностей для стационарных процессов не зависит от времени и поэтому обозначается через р(и). С помощью плотности вероятностей рассматриваемые величины можно записать следующим образом [28*, 75*, 92*, 119*]: 0= g{ti)p{u)du, (3.3-1) M=i; lgiu)piu)du, (3.3-2) Ку=- {u-m,)giu)piu)du, (3.3-3) Г ОО J g{u) p{u)du-gl Для проверки формулы (3.3-1) заметим, что g = m, M{y)M\g{u)]= I g{u)p(ii)du. (3.3-4) Выражение (3.3-2) получается из выражения (3.2-3) с помощью выражения (3.3-1). Выражение (3.3-3) получается из выражения (3.2-16)- Дополнительные пояснения требуются только для получения выражения (3.3-4). Дисперсия выходного сигнала равна 4= !(y-myfp(y)dy. Из выраясений (3.2-1) и (3.2-15) следует, что Оу = Us ( ) - ё'оР Р ( ) du = со оо €Х> = g4u)p{u)du-2g, j giu)p(u)du + gl \ p{u)du. -оо -со -со Последний интеграл равен 1, второй интеграл равен g. Следовательно, 4= g4ii)P(4)du~go и выражение (3-2-8) действительно -приводит к выражению (3.3-4). Отметим, что с помощью выражения (3.1-17) величину \s можно записать в виде (3.3-5) J (и - /я )2 р {и) du Кроме того, можно написать следующее выражение для Kv. j (u - mu)g(u)p{u)du (3.3-6) J iu - ma)p{u)du При m = 0 эта формула упрощается: j ugiu)p(u)dii J и^р (и) (3.3-7) Последнее выражение является конечной формулой метода линеаризации при случайном входе, предложенной Бутоном [2-4], Можно показать, что она основана по существу на минимизации выражения М [2] = 2 (/) = [у (О -К^ Щ = [(у - Kuf\. Таким образом, линеаризация при случайном входе, предложенная Бутоном, на самом деле является частным случаем более общего метода статистической линеаризации, предложенного Казаковым [1, 21а]. Действительно, М [(у - KyUj] = J(g(а) - Kyuj р{и) du = со ОО ОО = J ( ) Р ( ) - 2Ку, I ug (и) р (и) du + Kv J (и) du. - ОО -ОО -ОО Необходимым условием минимума является d что, очевидно, приводит к выражению (3.3-7). (Так как вторая производная положительна, это условие является также достаточным.) Используя выражения (3.3-1) - (3.3-7), легко можно определить искомые эквивалентные коэффициенты усиления- При этом плотность вероятностей р(и) должна быть известна заранее. Для замкнутой системы управления плотность вероятностей заранее неизвестна, однако она мало влияет на искомые величины в относительно широкой области. Плотность вероятностей на выходе линейных динамических элементов, связанных с нелинейным элементом, аппроксимируется, как уже ранее упоминалось, нормальным (гауссовым) распределением. Поэтому плотность вероятностей входной переменной можно также считать нормальной: = Vr- - 3.3-8) Значения плотности вероятностей нормализованной случайной переменной полученные с помощью замен (х„--/nj/o = v и о„ = 1, приведены в табл. 3.2-1. Для нормального распределения коэффи- функция р [р) = 1 - - 1 о Таблица 3.2-1 V 2п
циенты усиления Z, Kg и зависят только от среднего значения /п„ и стандартного отклонения o ; Это имеет место при любом нормальном распределении. Поэтому при статистической линеаризации искомые коэффициенты усиления являются функциями не только от полезной перемен-
Рис. 3.3-1. Блок-схемы общих принципов статистической линеаризации. ной Ши, но также от стандартного отклонения Ои. Если ти=0, то искомые коэффициенты усиления являются функциями только стандартного отклонения: Km = Kj{c Ks-Ksicu), Ky = Ky{oJ. в этих случаях р(а)=е- Г^1. (3.3-9) Если g(tt) дифференцируема, то наиболее часто используемое выражение (3.3-7) можно записать в виде 1 ... 5 6 7 8 9 10 11 ... 42 |
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |