


|
|
|
|
Главная страница » Электрика в театре » Измерительные коммутаторы амплитудно модулированных цепей 1 ... 14 15 16 17 18 19 20 ... 44  
Рис. 10.13. Вид кривых первых и вторых разностей их ординат: а - при пересечении; б - при касании Тогда используется экстраполяция кривых с помощью аппроксимирующих многочленов или статистическая экстраполяция и оценивается степень близости реализованных ординат кривых к предсказанным значениям. Из аппроксимирующих многочленов часто используется многочлен Ньютона относительно невысокой (3-5) степени. Для второй интерполяционной формулы Ньютона при равномерном квантовании и предсказании на один и на два интервала впе- ред предсказанные значения xh+\ и x*h+2 будут иметь следующий вид [10.2]: Количество используемых ординат 1 2 3 4 3Xfe--3xft i--Xft 2 4xfe-6Xft i+4Xfe 2-Xfc 3 3Xft-2Xfe i 6Xfe-Sxfc i+3Xft 2 1 Oxfe-20xfe i4-15xfc 2-4Xfc 3 СЛСА для расшифровки двух кривых: XI(CR:2, 4, 2 . г;,){ш[12м-г;<2м-41]1Х X\W{\Zk2-z*\<\Zk,~z\} ri(2ft./Zfe,. ZkJZk,)J г^). Увеличение количества используемых при предсказании отсчетов более трех-четырех может не привести к повышению точности прогнозирования из-за влияния погрешностей составляющих. Естественно для выполнения прогнозирования и решения вопроса об отнесении реализованных отсчетов к определенным кривым использовать микропроцессорную технику. 10.5. АКУСТИЧЕСКАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГРАФИЧЕСКИХ ИЗОБРАЖЕНИИ Измерение и выдача в цифровом виде координат сложных графических изображений на фотоносителях, чертежах и других документах применяются при автоматизации проектирования, в геологии и картографии, океанологии и т. п. Часто такие измерения производятся полуавтоматически с участием оператора, указывающего точки изображения, координаты которых необходима измерить. Для измерения координат в таких полуавтоматических устройствах используются датчики, позволяющие координаты заданной точки преобразовать (в информационном смысле) в изменение электрических параметров, отобразить на матричных сеточных моделях или преобразовать в интервалы времени прохождения световых или акустических импульсов между точками, определяющими измеряемые координаты. Ограничим'ся далее знакомством с полуавтоматической акустической системой для измерения координат точек на плоскости (на планшете) [10.3]. Излучатель ультразвука И - миниатюрный пьезокерамический цилиндр - совмещается оператором с точкой изображения, координаты которой измеряются (рис. 10.14). Три приемника ультразвука Я,-Яз расположены на одной прямой на известных с высокой точностью расстояниях; L/2. Использование трех приемников ультразвука позволяет измерять не только координаты х, у, но и скорость звука в среде. Приведем расчетные формулы для определения координат излучателя. Значение k - поправки на отклонение скорости звука; от принятой при расчете - определяется из известного соотношения, заключающегося в том, что сумма квадратов сторон параллелограмма равна сумме квадратов его диагоналей, т. е. по результатам измерений li - /3 и параметру системы L: 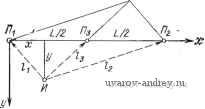 Рис. 10.14. Размещение источника И и приемников П1-П3 Поправка на реальную скорость звука позволяет уточнить резуль- таты измерении: toi-kti; /о2=4; lm=kts. Если 1-й 10,02, то данное измерение должно быть отброшено как ошибочное, так как такого изменения скорости звука в воздухе в лабораторных условиях не может быть. Координаты центра излучения сигнала определяются по формулам X = (/о1 - /o2)/2L + L/2; у = Vl, - л: Источник и излучает пакеты импульсов, в которых импульсы следуют с частотой fu а затем с /г- Отсчет интервалов времени прохождения акустических сигналов от точки излучения до точек приема производится именно с момента изменения частоты. Интер- вал времени между пакетами импульсов превышает время прохождения акустических сигналов планшета по диагонали. На рис. 10.15 показана структурная схема канала измерения расстояния li акустического измерителя координат. Она работает как Цифровая следящая система с двойным интегрированием по времени разности между интервалом времени, соответствующим величине li и определяемым по сигналу акустического приемника, и интервалом времени, пропорциональным сумме сформированных на выходе канала кода z{li) и скорости изменения этого кода 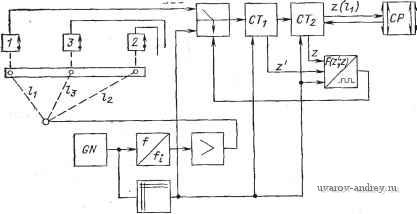 Рис. 10.15. Структурная схема одного канала акустического измерителя координат z(li). Алгоритм двойного интегрирования сигналов рассогласования в сочетании с прерывистым режимом работы излучателя обеспечивает: а) повышение точности устройства, так как фронт импульса, по которому определяется конец измерительного интервала времени, находится близко к началу пакета импульсов, т. е. наименее искажен отраженными сигналами; б) устойчивость устройства против акустических шумов, так как скорость 1\ корректируется на ±1 квант 1 раз за период излучения пакета импульсов; в) работу схемы в следящем режиме без динамических ошибок при средней скорости перемещения визира до 1 м/с. С помощью микро-ЭВМ Электроника-60 вводятся поправки на скорость звука, производится вычисление а; и и устраняются неверные результаты. Наличие ЭВМ позволяет одновременно со считыванием координат производить дальнейшую обработку графической информации по заданной программе. Акустический измеритель координат позволяет считывать информацию на поле размерами 1000x1000 мм с погрешностью примерно ±0,1 мм и обеспечивает достаточную для надежной работы защиту от помех и ошибочных действий оператора. Акустическое устройство в трехмерном исполнении может быть использовано в робототехнике, медицине и в других областях науки и техники. 10.6. о ГОЛОГРАФИЧЕСКИХ ИЗМЕРИТЕЛЬНЫХ СИСТЕМАХ Когерентные источники света (лазеры), когерентная оптика и оптоэлектронные преобразователи образуют основу датчиков класса лазерных измерительных систем (ЛИС) [10.4]. Различные методы использования лазерных системных датчиков позволяют создавать ЛИС для целей локализации, гироско-пии, измерения как линейных, так и угловых перемещений, скоростей, ускорений и т. п. Практически во всех названных областях с помощью ЛИС были получены возможности производить измерения с высокой чувствительностью, в некоторых случаях-с повышенной точностью. Среди методов, используемых в ЛИС, особого внимания заслуживают методы голографической интерферометрии [10.4, 10.5]. Эти методы сочетают в себе такие достоинства, как бесконтактное и одновременное получение информации о состоянии всех точек наблюдаемой поверхности, использование в процессе измерения естественной меры-длины световой волны, известной с метрологической точностью, высокое пространственное разрешение, определяемое разрешением оптических систем и в пределе соизмеримое с длиной волны, и др. Лазерные измерительные системы, основанные на использовании методов оптической голографии, называются голографическими измерительными системами (ГИС). При создании ГИС, реализующих методы голографической интерферометрии, возникает ряд проблем как методического, так и аппаратурного характера. К первым из них относятся выявление закономерностей, связывающих свойства интерферограмм с исследуемыми физическими явлениями, разработка новых методов определения исследуемых характеристик, создание простых и надежных методов обработки и расшифровки голографических интерферограмм, совершенствование методик их получения и разработка необходимого математического обеспечения. Существенной также является задача исследования метрологических характеристик как отдельных звеньев, так и ГИС в целом. К проблемам аппаратурного характера относятся проектирование специальных источников когерентного излучения, голографических установок, обеспечивающих реализацию всех методов регистрации и восстановления голограмм, разработка устройств ввода изображений в ЭВМ, способных передать информацию с требуемой точностью, и т. п. Для решения широкого класса задач экспериментальной механики была создана ГИС [10.5]. Она содержит (рис. 10.16) стаби- .лизированныи по мощности и частоте ионный газовый лазер Л, оптическую часть, содержащую универсальный голографический .интерферометр, предназначенный для одновременного получения четырех голограмм исследуемого объекта с разных направлений и получения топографических интерферограмм объекта, а также оптическую установку для восстановления интерферограмм, сканирующее электронное устройство быстрого ввода на диссекторе .ЛИ-605, имеющем однострочную развертку и до 300 различимых -ЛИНИЙ на экран, позволяющее исследовать оптические изображения размером 18X24 мм с дискретностью 256X256 точек, устрой- Л г---1 \Оптическая I *! часть Г* 1 J [объект исследования
А Рис. 10.16. Упрощенная структура голографической ИС ство расшифровки голографического изображения размером 60X60 мм с большим числом элементов разложения (свыше 10) С электромеханическим сканированием фотоэлектронным умножи-телем (на рисунке не показано), ЭВМ типа СМ-4 с накопителями :на магнитных дисках ТИД, устройство представления Д и фоторегистрации полутоновой и графической информации. Программное обеспечение создано на языках ФОРТРАН, ФОКАЛ, БЕЙСИК. На этой ГИС эффективно решаются задачи регистрации голограмм, голографических интерферограмм, их восстановления, обработки и расшифровки содержащейся в них информации. Это по-.зволяет получать информацию о частотах и формах колебаний из-.делий при их частотных испытаниях, о дефектах изготовления конструкций, о форме поверхности сложных тел, о векторах смещений точек поверхности объекта, поверхностных деформациях, .параметрах макро- и микрорельефа поверхности и т. п. Из перечисленного остановимся на измерении формы сложной .поверхности и перемещений объектов. Для измерения формы сложной поверхности может быть использован топографический метод, широко используемый в картографии. Его идея состоит в том, что трехмерный рельеф представляется в виде плоского изображения с линиями равного уровня- следами пересечения поверхности параллельными плоскостями с постоянным шагом. Если будет получена голограмма при использовании излучения лазера на длинах волн ?ч и Яг, то при восстановлении голограммы на изображении объекта образуются сечения рельефа его поверхности через шаг 6*=AiA2/2Ai-Аг]. При использовании этого метода удается получить 6* от 1 мкм до 1 мм. В изготовленной ГИС использовался ионный газовый лазер (на аргоне и криптоне) позволяющий получать 16 длин волн и шаг сечений 6* от 5 мкм до 0,5 мм. При расшифровке и соответствующей обработке (сглаживание по 60 точкам, определение экстремума и т. п.) можно по/-лучить дробные части шага сечений. Л \---------- 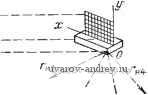 Рис. 10.17. К измерению перемещения с помошью голографической ИС Топографическое изображение поверхности объекта может быть успешно использовано для получения статистических характеристик поверхности, для определения соответствия поверхности заданной норме, т. е. для выполнения процедур контроля и т. п. Для определения перемещения точки О (рис. 10.17) на ГИС по анализу интерферограммы, полученной в начальном и конечном положениях объекта, составляется система уравнений di (го-ЬгнО =N1%; d2 (Po-f Гиг) =iV2; Я3 [го+Гкз) =Ns. Здесь Го, Гн1, Гн2, Гнз-направления освещения и наблюдения; d-смещение в направлении наблюдения; Л^ь N2, Ns-количество интерференционных полос от полосы нулевого порядка объекта (недеформируемой точки, например основания в точке О,-как на рис. 10.17). Четвертое уравнение Й4(го+гн4) =Л^Д необходимо для того, чтобы определить направление перемещения. Уместно сказать, что для повышения точности измерения можно учитывать дробные части количества интерференционных полос, используя известную зависимость интенсивности изображения от расстояния между полосами. Погрешность измерения очень малых перемещений (порядка нескольких десятков микрометров) может быть около 1%. Глава 11 МНОГОМЕРНЫЕ И АППРОКСИМИРУЮЩИЕ ИС 11.1. МНОГОМЕРНЫЕ ИС (СИСТЕМЫ ДЛЯ РАЗДЕЛЬНОГО ИЗМЕРЕНИЯ ВЗАИМОСВЯЗАННЫХ ВЕЛИЧИН] Если исследуемое явление или объект характеризуется множеством величин [л'г], [хп]} и они независимы друг от друга (на это указывает заключение каждой величины в квадратные скобки), то можно при наличии селективных датчиков произвести измерения всех [xi]. При независимых [xi], но неселективных датчиках, сигналы на выходе которых будут содержать составляющие от нескольких {х,}, встает задача выделения (ав-тономизации) каждой измеряемой величины [xi]. Если же элементы множества x-(xi, Хг, Хп) между собой связаны, то необходимость рещения задачи раздельного измерения величин Xi очевидна. Наиболее типичные примеры таких задач связаны с измерением массовых концентраций составляющих многокомпонентных жидких, газовых или твердых смесей (положим, концентраций кислот или щелочей) или с Измерением параметров компонентов сложных электронных Цепей без гальванического расчленения. 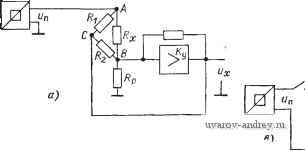 j2, 0 Рис. 11.1. Схемы для раздельного измерения Rx в соединениях треугольником (а), звездой (б) и Rx, Сх комплексного сопротивления (е) При известном составе многокомпонентного соединения можно решать задачу раздельного измерения компонентов с помощью разделения составляющих I{x={xi, Хг, .... Xn)/[xi], [хг] [хп]} и последующего измерения автономизированных компонентов либо путем одновременного анализа всего множества x={xi, xi, Хп) Суть первого способа-раздельного измерения взаимосвязанных величин-заключается в организации воздействия на многокомпонентное соединение в целях выделения и измерения нужного компонента. Для механических и химических соединений существуют методики и средства такого расчленения: масс-спектромет- рия, хроматография, люминесцентный аналаз, центрифугирование и ДР- Каждая из этих методик имеет свою теоретическую и аппаратурную базу. В сложных электрических цепях (в том числе в микроэлектронном исполнении) для раздельного измерения параметров компонентов этой цепи создаются режимы, с помощью которых происходит расчленение сложных цепей на простые [11.1]. На рис. ll.l.a представлена схема, позволяющая произвести измерение Rx, не разрывая треугольное. соединение сопротивлений. При Ку-1, Ub=Uc Rcb= = 00, Ux=UnRo/(Ro-\-Rx) и Rx={Uu~Ux)RolUx. Путем выравнивания токов 1х=1-2 в ветви звезды с и измерения напряжения Ud=RoIx на известном сопротивлении R можно получить Ип1=/а:з:-- +IxRo=IxRx+Uo=ud[{RxlR:o) + l] и Rx={Uui-Uo)Ro/uo (рис. 11,6). При использовании переходных режимов можно осуществить временное разделение сигналов, несущих информацию- о составляющих комплексного сопротивления (рис. 11.1,е). После подключения известного напряжения %{0 = Со + Сх ехр Ro+Rx \ ехр R, + Rx (Co+c)RoRx При t=0 и:{0)ипСо1{Св+Сх), а при t=<x> Ux{<x>)UnRx/(Ro+Rx). Заметим, что при т=0,01 e-°-°=0,QQ, а при т=10 е- =45-Ю-. Представляют интерес используемые для раздельного измерения иные разновидности инвариантных преобразователей [11.1]. . ,г; При анализе всего многокомпонентного соединения используется метод составления н решения системы уравнений, учитывающих взаимосвязь между вег личинами X и множеством непосредственно измеряемых величин G, являющихся известными функциями яр от исходных величин. Пусть имеется множество од- п породных величин Х=[Хг}п, причем известно, что Xi=l. Нужно произвести измерение каждой величины Хг, например массы или концентрации составляющих газовых, жидких, сыпучих или твердых смесей. Если заранее, например экспериментальным путем, определены зависимости между [хг] и множеством других отличающихся по физической природе величин {9,} , которые отражают измеряемые свойства исследуемого объекта, то можно составить систему уравнений 9i= Фх (Xi, Х2, х„); 92= Фа (51, Х2, х„); ?/=Ф/(%. .... xj; ?m = Фга(Х1, Хг, Xj; в наиболее простых случаях при линейных зависимостях ipj эти уравнения - алгебраические. Реализация метода возможна, если: 1) число вторичных величин Qj, подлежащих непосредственно прямым измерениям, и функций ijjj равно или больше числа неизвестных Xi, т. е. с учетом п уравнения Xi=\ выполняется неравенство т^{п-1). Если m<(n-1), то 1=\ система уравнений недоопределена и задача разрешима не полностью; 2) зависимости i]),- и их производные dii>i/dxi существуют и непрерывны на участке возможных решений системы уравнений; 3) функциональный определитель (якобиан) системы уравнений не равен тождественно нулю на участке возможных решений:  LXi cxz i5x По существу, это условие сводится к независимости функции apj и разной чувствительности Qj от Xi. Приведем примеры реализации этого .метода. Допустим, необходимо измерить процентный состав компонентов водного раствора серной и азотной кислот. Если выбраны для измерения физические параметры раствора qi и q (положим, электропроводность и плотность), обладающие свойствами аддитивности, то система уравнений примет вид OiXi + йаХг -f- ag.Yg = q; fciXi + bx 4- 6д.гз = %; . Xi+Xz+Xg = 1. В этой системе коэффициенты а 2, и fc Ьг, Ьз известны; qi и 92 измеряются в процессе эксперимента. Решение этой системы: 9i - 3 02 - Й3 Хп - 1 - йз O2 - I?: bi - bgbi - 63 % - Й3 ?i - Й3 61 -3 72-fcs 61 - 63 62 - 63 = i9i + 3i72 + i; = 2?! + P2?2 + Ч2; По такому принципу работают устройства, предназначенные для измерения концентрации алюминиевого раствора, экспрессного анализа тройных водно-солевых растворов (по измерению плотности и коэффициента преломления) и др. Добавим, что промышленностью выпускаются анализаторы состава осади-тельной ванны целлофана ACB-I, выполняющие раздельное измерение концентрации серной кислоты и сульфата натрия путем измерения плотности и электропроводности ванны и решения соответствующей системы уравнений, анализаторы состава щелочных растворов АСЩ-1, позволяющие через измерение плотности и электропроводности и решение системы уравнений оценить концентрации едкого натра и гемицеллюлозы в щелочных растворах целлюлозных производств. Нужно заметить, что помимо плотности и электропроводности часто используются измерения теплопроводности, вязкости, скорости распространения и поглощения ультразвуковых колебаний, поглощения и рассеяния радиоактивных излучений и др. На использовании измерений поглощения и рассеяния радиоактивных излучений работают у-абсорбциометры [П.2]. При облучении анализируемого вещества радиоактивным излучением часть потока поглощается, часть рассеивается и часть проходит через вещество. Интенсивность поглощения и рассеяния зависит от атомной массы элементов. Ослабление происходит по закону 11де~, где - начальная интенсивность излучения, (X-коэффициент ослабления излучения веществом, р-плотность вещества, d - толщина слоя вещества. Коэффициент ослабления является функцией энергии излучения Е, атомной массы вещества А и атомного номера вещества z. При различных энергиях излучения коэффициент ослабления зависит от различных эффектов. При малых энергиях Е (порядка 0,1-0,01 МэВ) преобладает фотоэффект (вырывание электронов из оболочки), для которого Цф ii{E)z/A, при средних энергиях (O.Sfl МэВ) - комптон-эффект (отклонение гамма-кванта)-\11.к^щ{Е)г/А и при больших энергиях (£>1 МэВ)- образование пар электрон - позитрон - Цп(р^{Е)г^/А. Облучая и-компонент-ную смесь поочередно от т источников у-излучения с различными уровнями энергии Е и измеряя р, можно получить необходимые данные для составлення и решения системы уравнений. Подобный метод, но при использовании световых потоков с разными длинами волн используется для определения состава пульпы, состоящей из сульфита магния и магнезита в воде. В качестве параметров смеси, аддитивно зависящих от концентрации сульфита, выбраны при этом оптические свойства пульпль Относительная приведенная погрешность измерения концентрации MgO в диапазоне 4-8 % и MgSOs в диапазоне 7-12 % составляет не более 2 % при изменении дисперсности частиц от 100 до 300 мкм. На практике весьма часто связь между концентрациями компонентов и измеряемыми параметрами носит нелинейный характер. В этом случае имеется возможность аппроксимации этой зависимости многочленами. В [11.3] приводятся данные, показывающие, что в ряде практически важных случаев измерения концентрации состава сложных смесей достаточно применять приближение многочленами третьей степени. Для алюминатных растворов (в случае измерения электропроводности и скорости ультразвука в растворе) при введении в систему уравнений в качестве параметра температуры погрешность определения концентрации с кубической аппроксимацией не превышает 1-1,5% измеряемого диапазона. 1 ... 14 15 16 17 18 19 20 ... 44 |
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |