


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 ... 6 7 8 9 10 11 12 ... 18 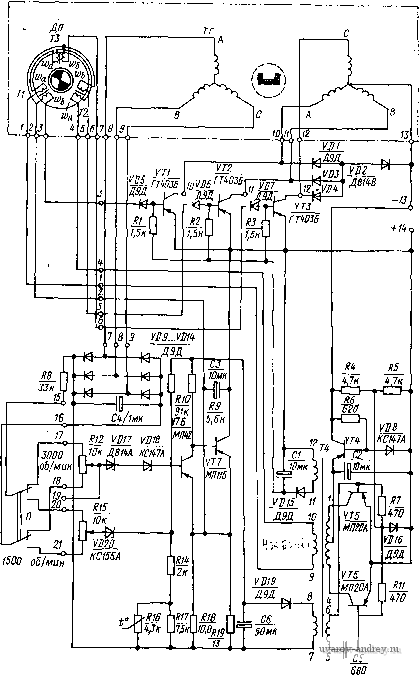 Рис. 6-23. Полная схема двигателя БДС-0,2 с электронным коммутатором ДЛЯ защйТк силовых Т{)анзйсто{)ов oi йеренайряжений, возникйк5-щих при их запирании. Генератор питания датчика положения собран на трансформаторе Т4 с ферритовым сердечником, частота его генерации 40-60 кГц. Запитывается генератор от стабилизатора напряжения (транзистор VT4}, благодаря чему обеспечивается постоянство режимов питания датчика и регулятора скорости при относительно большом изменении напряжения питания двигателя. Регулятор скорости (транзисторы VT6, VT7) содержит усилитель, выходной транзистор VT6 которого, рассчитанный на работу в режиме переключения, коммутирует базовую цепь управления силовйми транзисторами; на вход усилителя включены стабилитроны VD17, VD18 и VD20, напряжение пробоя которых опреде ляеТ стабилизированную скорость. Напряжение тахогенераторной обмотки, выпрямленное диодами VD9-VD14 и сглаженное конден-сатором С4, в зависимости от выбранной частоты вращения (3000 или 1500 об/мин) подключается переключателем П к потенциометрам 12 или 15, с которых подается на вход регулятора и сравнивается с напряжением стабилитронов. Разность напряжений тахогенератора и напряжения стабилитронов поступает на вход усилителя. Если напряжение тахогенератора меньше опорного напряжения стабилитрона, то двигатель будет включен (транзистор VT6 открыт), его скорость будет нарастать. При напряжении тахогенератора, большем опорного напряжения стабилитрона, двигатель отключается (транзистор VT6 заперт) и скорость двигателя уменьшается. В результате автоколебательного процесса средняя скорость двигателя поддерживается на заданном уровне. Для компенсации изменения скорости от колебаний тем* пературы окружающей среды в базовую цепь усилителя включен терморезистор R16. МАСТЬ ТРЕТЬИ ЭЛЕКТРИЧЕСКИЕ МИКРОМАШИНЫ, СПЕЦИФИЧЕСКИЕ ДЛЯ ПРИБОРНЫХ СИСТЕМ И АВТОМАТИКИ Глава седьмая ТАХОГЕНЕРАТОРЫ 7-1. Назначение и классификация тахогенераторов Тахогенераторами (ТГ) называются электрические микромашины, выходная ЭДС которых пропорциональна угловой скорости ротора. Поскольку генерируемая в электрических машинах ЭДС пропорциональна скорости ротора, то в качестве ТГ может быть использован любой тип электрического генератора: синхронный, асинхронный, постоянного тока, индукторный и т. д. В автоматических системах малой мощности наибольшее рас- А 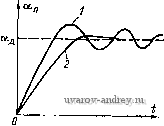 Рис. 7-1. Принципиальная схема следящей системы с демпфирующим тахогенератором Д - датчик; Я - приемник;, ДИ - исполнительный двигатель; ТГ - Тахогенератор; Р - редуктор Рис. 7-2. Кривые переходного процесса при согласований следящей системы пространение получили два типа ТГ: асинхронные и постоянного тока. В зависимости от назначения все они делятся на две группы: ТГ для демпфирования следящих систем и ТГ как счетно-решающий элемент в электромеханических интеграторах. На рис. 7-1 приведена принципиальная схема следящей системы, в которой ТГ использован для скоростного демпфирования. Выходная ЭДС тахогенератора складывается с сигналом измерителя рассогласования командной и исполнительной осей и подается через усилитель на исполнительный двигатель. Применение ТГ улучшает качественные показатели следящей системы. При отсутствии сигнала обратной связи по скорости в следящей системе, как правило, наблю- дается перерегулирование и она приходит в согласованное положение после нескольких колебаний кривая / на рис. 7-2). При включении демпфирующиего ТГ исполнительная ось не совершает колебаний при приближении к положению согласования (кривая 2). ТГ вырабатывает сигнал, противоположный по знаку сигналу рассогласования, и перерегулирования не происходит. Схема электромеханического интегратора с ТГ постоянного тока приведена на рис. 7-3. Входным сигналом является напряжение и (О, которое необходимо проинтегрировать, выходным -- напряжение С/о на потенциометре {Пт), которое пропорционально J и {t) dt. Рассмотрим основные соотношения для этой схемы. При медленном изменении входного сигнала исполнительный двигатель, управляемый через усилитель разностью входного напряжения и ЭДС ТГ, успевает в любой момент времени достигнуть скорости, при которой (О = г; но = kr da/dt, где - коэффициент пропорциональности для тахогенератора. < t 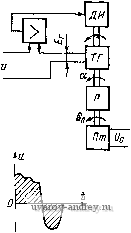 Рис. 7-3. Принципиальная схема электромеханического интегратора с ТГ постоянного тока Напряжение, снимаемое с линейного потенциометра, пропорционально углу поворота его движка 0п: где kn - постоянный коэффициент - крутизна выходного напряжения потенциометра; ред - передаточное число механического редуктора. Таким образом, п^ред и {t) dt. (7-1) Требования, предъявляемые к характеристикам демпфирующих и счетно-решающих ТГ, существенно различны. Для счетно-решающих ТГ наиболее важными показателями являются: линейность зависимости выходной ЭДС от угловой скорости ротора, т. е. постоянство kr; стабильность характеристик во времени и отсутствие ЭДС при неподвижном роторе. Погрешность воспроизведения линейной зависимости для ТГ этого типа составляет 0,025-0,05 %. Для демпфирующих ТГ нелинейность зависимости выходной ЭДС от скорости может быть в пределах нескольких процентов; для них более важное значение имеют крутизна выходной ЭДС, отсутствие помех в выходном сигнале, момент инерции ротора. Кроме указанных двух типов ТГ, в автоматических и других системах используются ТГ как измерители угловой скорости валов двигателей и различного рода механизмов. В качестве измерителей скорости вращения применяются электрические машины постоянного тока с постоянными магнитами, индукторные и синхронные генераторы. Они имеют относительно высокую линейность зависимости выходного напряжения от скорости; погрешность воспроизведения линейной зависимости составляет 0,1-0,5 %. 7-2. Принцип работы, устройство и величины, характеризующие асинхронный тахогенератор Асинхронный тахогенератор (ТА) представляет собой двухфазную асинхронную машину с короткозамкнутым ротором, выполненным в виде тонкостенного немагнитного стакана. На статоре ТА расположены две обмотки, оси которых смещены в пространстве относительно друг друга на 90° (рис. 7-4). Одна из обмоток - обмотка возбуждения - включается в сеть переменного тока. Обозначим эту обмотку через В. Она создает в машине пульсирующий с частотой сети магнитный поток ф^. Поскольку ось этого потока совпадает с осью обмотки возбуждения, его называют продольным магнитным потоком. Продольный поток пропорционален приложенному напряжению, т. е. Ub. При неподвижном роторе пульсирующий магнитный поток индуцирует в роторе трансформаторную ЭДС, которая создает ток и НС по продольной оси. Если ротор ТА приведен во вращение с некоторой угловой скоростью ©р = da/dt, то в нем индуцируется еще ЭДС вращения, пропорциональная ф^ и ©р: Фada/dt. Под действием этой ЭДС возникают поперечный ток ротора 7, и поперечный поток ф^, которые также пропорциональны Ub и изменяются во времени с частотой сети. Поперечный магнитный поток фд индуцирует во второй обмотке ТА, называемой генераторной, ЭДС  Рис. 7-4. Принципиальная электрическая схема асинхронного тахогенератора (7-2) где - коэффициент пропорциональности, зависящий от электрических параметров обмотки и ротора ТА. ft? Частота ЭДС генераторной обмотки ТА не зависит от угловой скорости ротора и всегда равна частоте сети, от которой питается обмотка возбуждения; ее фаза определяется электрическими параметрами ТА. Необходимо отметить, что в общем случае линейная зависимость ЭДС генераторной обмотки от угловой скорости ротора на самом деле существует с некоторым приближением, которое зависит главным образом от активного соп{)отивления KooTi(6-вамкнутого ротора и индуктивного сопротивления рассеяния обмотки возбуждения. Конструктивные схемы ТА представлены на рис. 7-5. ТА состоит из внешнего 2 и внутреннего 3 магнитопроводов (выполненных из листового пермаллоя), полого немагнитного ротора 4 и двух обмоток: возбуждения 5 и генераторной 6. Изображенные на рис. 7-5 конструктивные схемы ТА отличаются друг от друга местом расположения обмоток. В первой схеме (рис. 7-5, а) обе обмотки (возбуждения и генераторная) располагаются на внешнем магнитопроводе, во второй (рис. 7-5, б) - на внутреннем магнитопроводе, в третьей (рис. 7-5, в) одна из обмоток располагается на внешнем магнитопроводе, а другая на внутреннем. Внутренний магиитопровод крепится на втулке 7. Сквозь втулку проходит вал ротора 1.   Рис. 7-5; Принципиальные конструктивные схемы ТА: а - обе обмотки иа внешнем магнитопроводе; б - обе обмотки на внутреннем магнитопроводе; в - одна обмотка на внешнем, а другая на внутреннем магнитопроводе 1 - вал; 2 - внешний магиитопровод; 3 - внутренний магиитопровод; 4 - ротор; 5- обмотка возбуждения; 6 - генераторная обмотка; 7 - крышка со стулкой Остановимся несколько подробнее- на функциях, выполняемых счетно-решающими ТА. Из уравнения (7-2 следует, что при неизменном напряжении возбуждения ЭДС генераторной обмотки £г = №-= о- (7-3) или Оо о j Erdt, т. е. при помощи ТА можно решать задачи дифференцирования и интегрирования функций. Для дифференцирования какой-либо функции необходимо по-ворачивать ротор ТА на угол, пропорциональный этой функции; #огда напряжение на генераторной обмотке будет пропорционально производной этой функции. В Том случае, когда производная должна быть представлена в виде угловой величины, используется схема, изображенная на рис. 7-6. Помимо известных элементов в этой схеме использован ЛВТ - линейный вращающийся трансформатор. Для интегрирования функции во времени надо преобразовать ее в электрическое напряжение и вращать ротор ТА так, чтобы ЭДС его генераторной обмотки в любой момент времени компенсировала dec dt
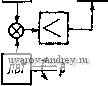 Рис. 7-6. Структурная схема для выполнения операции дифференцирования Рис. 7-7. Структурная схема электромеханического интегратора ЭТО напряжение. Тогда угол поворота ротора ТА будет пропорционален интегралу данной функции по времени. Очевидно, что преобразователь функции в напряжение и асинхронный тахогенератор должны питаться от одной сети. На рис. 7-7 приведена принципиальная схема электромеханического интегратора с асинхронным тахогенератором. Если напряжение возбуждения ТА изменять пропорционально другой заданной функции времени, то, как видно из формулы (7-3), с помощью ТА можно получить интеграл отношения двух функций: ki J Как уже отмечалось, зависимость напряжения генераторной обмотки ТА от скорости и от напряжения возбуждения приближенно соответствует уравнению (7-2) - характеристике идеального тахогенератора. Расхождения по амплитуде и фазе между идеальным' и действительным напряжением представляют собой погрешности ТА (подробно вопрос о погрешностях ТА рассматривается в § 7-6). Как элемент электрических счетно-решающих устройств и систем автоматики асинхронный тахогенератор характеризуют следующими данными: напряжением и частотой питающей сети; потребляемыми током и мощностью; крутизной ЭДС генераторной обмотки (в милливольтах на оборот в минуту); фазовым сдвигом ЭДС генераторной обмотки относительно напряжения возбужде- НИя; йУхбдНыМ бопроТЙЁЛенйем геНе{)аторной обмотки; моментоМ инерции ротора; относительными амплитудными погрешностями от изменения скорости, температуры и частоты сети; фазовыми погрешностями от изменения этих же величин; остаточной ЭДС генераторной обмотки.
 7-3. Векторная диаграмма ТА для режима холостого хода Физическую сущность работы ТА можно наглядно представить с помощью векторной диаграммы токов и напряжений для режима холостого хода (генераторная обмотка разомкнута), изображенной на рис. 7-8. Векторная диаграмма приведена для электрической схемы ТА, представленной на рис. 7-4, в которой короткозамкнутый ротор заменен двумя квазинеподвижными взаимно перпендикулярными обмотками, приведенными по числу витков к обмотке возбуждения. Физически это соответствует разложению каждой величины, характеризующей ротор ТА (НС, ток, магнитный поток), иа две составляющие: продольную, совпадающую с осью обмотки возбуждения, и поперечную, совпадающую с осью генераторной обмотки. При построении векторной диаграммы учитываются все параметры обмоток, за исключением индуктивного сопротивления рассеяния полого ротора, которое принимается равным нулю. Векторная диаграмма ТА строится в такой последовательности. В качестве исходного принимается вектор продольного магнитного потока Фd. Этот магнитный поток индуцирует в обмотке воз. буждения ЭДС (на диаграмме отложен вектор противо-ЭДС-£в). а в продольном контуре ротора - трансформаторную ЭДС Ed, отстающую от магнитного потока на 90°. При-вращении ротора магнитный поток Ф,; индуцирует в поперечном контуре q ЭДС вращения Eg, совпадающую по фазе с потоком. Под действием ЭДС Ёд в поперечном контуре ротора возникает ток ig, создающий по оси генераторной обмотки поперечный магнитный поток Фд. Этот поперечный магнитный поток индуцирует в генераторной обмотке трансформаторную ЭДС Ёг, а в продольном контуре ротора ЭДС вращения которая при принятом направлении вращения ротора находится в противофазе с потоком Ф^. В продольном контуре ротора действует ЭДС Ed = Ed+ E d, равная геометрической сумме ЭДС Ё' и k. Соответственно этому в продольной обмотке ротора появляется ток Id, равный сумме токов Id и i d от этих ЭДС. Ток возбунсдения /в равен сумме тока намагничивания /о и тока в про' дольном контуре ротора с обратным знаком (-Id). Рис. 7-8. Векторная диаграмма ТА для режима холостого хода Мапряжение обмотки возбуждения Од равно геометрической сумМе противо-ЭДС - Ёв я падений напряжения на собственных параметрах обмотки /вГв и /л:в5/в;.ЭДС Eg равна сумме падений напряжений в поперечном контуре ротора 1дг и jXmlg, а ЭДС в продольном контуре - сумме падений напряжений , и jxi. Поскольку ЭДС вращения Ё^ прн постоянном пропорциональна угйовой скорости ротора, то н ток 1д, магнитный поток и ЭДС генераторной обмоткн, связанные с ней линейной зависимостью, также пропорциональны угловой скорости. В действительности вследствие изменения тока возбуждения при вращении ротора и соответственно падений напряжений на собственных параметрах обмоткн возбуждения противо-ЭДС - Ёв к магнитный поток Ф,; не остаются постоянными, что приводит к нскаженню линейной зависимости ЭДС генераторной обмоткн от угловой скорости ротора. Точный анализ этого искажения рассматривается ниже на основе решения уравнения ЭДС ТА. Здесь же, пользуясь векторной диаграммой, сделаем приближенную оценку. Уравнения ЭДС цепн возбуждения ub= -ёв+1в (гв + ixbs) = kiu>d + ibzb- (7-4) (7-5) Ток возбуждения /в представим в виде в-вО+ы, где /во - ток возбуждения прн неподвижном роторе ТА; /3 -добавочный ток возбуждения, обусловленный ЭДС вращения и током в продольном контуре ротора от поперечного потока Ф,;. Очевидно, что / = fegpd). Но - сор фа; (7-6) поэтому * = *зФХ (7-7) (здесь ,kx, 2. 13 - постоянные коэффициенты, зависящие от параметров и обмоточных данных ТА). Из уравнений (7-4), (7-5) н (7-7) получаем £>b-/boZb отсюда, пользуясь соотношениями (7-6), находим Ёг = к^фд = к,а,рфа = -{ub- ibozb) \ + {k,ik,)zy (7-8) где fei и fej -- также постоянные для данного ТА коэффициенты. Формула (7-8) дает характер искажения линейной зависимости ЭДС генераторной обмотки от скорости ротора. Нелинейность зависит от отношения коэффициентов kg/ki, собственного сопротивления обмоткн возбуждения zb н диапазона изменения угловой скорости ротора. Прн уменьшении k/ki н zb линейность ЭДС генераторной обмоткн улучшается. Как видно нз векторной диаграммы, ЭДС генераторной обмоткн отстает по фазе от напряжения возбуждения на некоторый угол, обычно 10-40°. 7-4. Уравнения ЭДС асинхронного тахогенератора Уравнения ЭДС ТА практически совпадают с уравнениями ЭДС обобщенной электрической мащины полученными в § 1-2. В отличие от обобщенной идеализированной машины для ТА будем считать, что: напряжения, приложенные к обмоткам ротора, равны нулю; взаимная индуктивность по продольной и поперечной осям одинакова; индуктивное сопротивление рассеяния ротора равно нулю (это допущение оправдывается тем, что обмотка ротора располагается в воздушном зазоре); в цепь генераторной обмотки включено некоторое сопротивление Z. Электрическая схема ТА под нагрузкой приведена на рис. 7-9. Уравнения ЭДС контуров ТА при постоянной угловой скорости в установившемся режиме запишем в виде  Рис. 7-9. Электрическая схема ТА под нагрузкой В ZB + JXm О Г о Zr + jXm - VXm iXm iXm 0 r + jXm VXm 0 iXm - VXm r + jXm
(7-9) где Zb = r, + jxbs; Z; = Гг + Дг s + 2h = 2r -f Zh. при анализе ТА наибольший интерес представляют Токи /в и /г. Поэтому, исключая из уравнений (7-9) токи и придем к системе уравнений относительно токов /в и 1г' В В Г Zb + г zn-v Zr +
(7-10) Здесь Z = r + jx (7-11) Решая эти уравнения относительно токов l\ и /г, получаем 1в=и,-- [Z + 2з - 2з (/x /Z)V] + Z (Z3 + Z ) [2n + 2b - 2з (/x /Z)V] + Z (Z, + Z ) Напряжение на зажимах генераторной обмотки f/r = /.Z . (7-12) (7-13) (7-14) Полученные формулы позволяют произвести расчет основных характеристик ТА при любых сопротивлениях нагрузки и скорости ротора. Входное сопротивление ТА определяется по формуле Z = =2в + 2п(2п + 2;) <[i-(iV)V]-fz (7-15) Формулу для расчета выходного сопротивления ТА вследствие симметрии обмоток получим из формулы (7-15) путем замены на Zr и Zr на Z: Zaax - Zr-\- ZA\-(jxjZfv] + Zn (7-16) Как видно из полученных формул, входное и выходное сопротивления ТА зависят от скорости ротора. Поскольку счетно-решающие ТА обычно работают в компенсационных схемах, рассмотрим выражения для =Ёг iiZ в ре-176 жиме холостого хода. Полагая, что Z = Zr = оо, находим или где /в=С/ Ег = и, Zn+Zl-JJv XmlZ О Zb + Z Яг=аС/в- XmlZ 1 -f 1 4- B/Zn {r -f jXm) Irjxm + ZB(r + jXm)] (Zb -Ь Zn) Z2 {r + jXm) Irjxm + Zs(r + jXm)] Введя безразмерные параметры Гв II,. f - г = 5; (7-17) (7-18) (7-19) (7-20) формулы для а и 6 перепишем в виде /Р (Р + /)[/Р + № + /1)(Р + /)] (Р + /)[/Р + (-Ь/1)(Р + /)] Входное сопротивление ТА Zbx = Zb + \-{\xJZf (7-21) (7-22) При w == О Zbx = Zb + Zn, что соответствует схеме замещения трансформатора при коротком замыкании (рис. 7-10). Первичная обмотка трансформатора - обмотка возбуждения, вторичная - полый ротор. Из формулы (7-18) следует, то ЭДС генераторной обмотки ТА зависит от скорости ротора нелинейно. Линейность обеспечивается уменьшением коэффициента Ъ. Наиболее целесообразно уменьшать Ь, увеличивая активное сопротивление ротора, поэтому роторы счетно-решающих ТА изготовляются из материалов с высоким удельным сопротивлением. Следует заметить, что с увеличением г падает крутизна ЭДС генераторной обмотки, определяемая коэффициентом а. В некоторых случаях желательно, чтобы ЭДС гшераторной обмотки совпадала по фазе с напряжением возбуждения. Это требование удовлетворяется, если Im а = О, поэтому см. (7-34) Г т 1Г Рис. 7-10. Схема замещения ТА при неподвижном роторе При этом коэффициент, определяющий крутизну ЭДС генераторной обмотки, р(р^-1) (7-23) (P+l)lP + (P+l)g] 7-5. Схемы замещения ТА Схема замещения ТА, соответствующая уравнениям (7-9), получается из схемы замещения неявнополюсной электрической машины (см. рис. 1-7), если принять *s = о, а вместо напряжения \Uq включить сопротивление нагрузки (рис. 7-11). Выходное напряжение на схеме замещения равно VZh и сдвинуто по фазе на 90° по отношению к действительному напряжению на зажимах генераторной обмотки ТА. Произведя преобразования, аналогичные тем, которые были выполнены в § 1-2, уравнения (7-10) запишем в виде (/в = 1 -Й^о 0 = - Zr-fZ - (7-24) §той сис+еме уравнений соответствует схема Замещений, прийедеИИая на рис. 7-12. Уравнения ЭДС ТА по методу симметричных составляющих получим из уравнений ЭДС обобщенной машины (2-15), положив в них (/q = 0; Z = Zp-Zb -h Z : Рис. 7-11. Схема замещения ТА при вращающемся роторе
tc be fv Zb -f iXm+ 2 jXm 0 Zb -f im -b 0 jXm 0 -\-ix
jXm 0 + ix (7-25) Ug/2 If с J ifp Ibp Xm Рис. 7-12. Схема замещения ТА при исключенных токах ротора Рис. 7-13. Схема замещения ТА, полученная на основе метода симметричных составляющих Этой системе уравнения для токов /fc, 1ьс, hp< hp соответствует схема замещения, изображенная на рис. 7-13. Падение напряжения на сопротив- Ления Zii Uh = Za (Ifc - he) = - /2н/г = - jUri (?-26) отсюда Ur = jUa- Для режима холостого хода (2н = оо) на схеме замещения (рис. 7-13) ЭДС генераторной обмотки равна разности потенциалов между точками А и В и сдвинута по фазе по отношению к ней иа 90°. 7-6. Погрешности ТА Классификация погрешностей ТА. Для асинхронных тахогенераторов первостепенное значение имеет линейная зависимость ЭДС генераторной обмотки от скорости ротора в достаточно широком интервале изменения температуры, напряжения л частоты сети. В реальных условиях это требование выполняется с некоторым приближением, которое характеризуется погрешностями ТА: 1) относительной амплитудной погрешностью ЭДС генераторной обмотки от изменения скорости, температуры, напряжения и частоты; она определяется как отношение максимальной разности ЭДС реального и идеализированного ТА АЕ к максимальной ЭДС генераторной обмотки: £г., Д£ Sr., Ег. макс (7-27) где Д^ц, AEt, АЕц, AEf - максимальная разность ЭДС генераторной обмотки при изменении соответственно скорости, температуры, напряжения и частоты; 2) фазовой погрешностью, под которой понимается максимальное отклонение фазы ЭДС генераторной обмотки Аф от ее номинального значения при изменении скорости, температуры, напряжения и частоты; 3) остаточной ЭДС-ЭДС генераторной обмотки при неподвижном роторе (ее иногда называют ЭДС помех). Как и для всех электрических информационных микромашин, перечисленные погрешности ТА по своей физической природе можно разделить на четыре группы. 1. Погрешности, вытекающие из принципа работы; для ТА эти погрешности обусловлены нелинейной зависимостью ЭДС генераторной обмотки от скорости ротора (7-18) и обозначаются: е„ - относительная амплитудная погрешность от изменения скорости и Дфо - фазовая погрешность от изменения скорости. 2. Погрешности из-за конструктивных ограничений ТА как электрической машины; сюда относятся погрешности от высших пространственных гармоник индукции и от нелинейности кривой намагничивания; они сравнительно невелики и для ТА могут не рассматриваться, если составляют не более 0,05 %. 3. Технологические погрешности ТА из-за неточности изготовления магнитопроводов и полого немагнитного ротора; они воз- нйкают главном образом при малЫх скоростях и с количественной точки зрения характеризуются остаточной ЭДС, которая в общем случае содержит две составляющие: постоянную, определяемую электрической и магнитной асимметрией магнитопровода, и переменную, зависящую от электрической асимметрии ротора. 4. Погрешности от изменения условий эксплуатации; наиболь* шее значение имеют погрешности от изменения температуры и частоты сети. В ТА различных типов и назначения требования к перечислен* ным погрешностям неодинаковы. Естественно, что наиболее жест-* кие требования к погрешностям предъявляются в счетно-решающих ТА. Рассматриваемый ниже анализ погрешностей выполнен для ТА этого типа. Амплитудные и фазовые погрешности ТА от изменения скорости. Для определения погрешностей ТА от изменения скорости ротора воспользуемся формулой (7-18). Знаменатель в этой формуле представляет собой комплексное число, равное сумме единицы и малого по модулю комплексного числа bi. Изменение модуля знаменателя характеризует амплитудную погрешность ТА, а изменение аргумента - фазовую погрешность. Пусть Ик - относительная скорость ротора ТА, при которой ЭДС генераторной обмотки Ег и ЭДС по выбранной линейной зависимости Ео компенсируют друг друга (рис. 7-14). Тогда относительная погрешность ТА, записанная в комплексной форме,
/77 Рис. 7-14. Зависимость ЗДС генераторной обмотки ТА от скорости ротора foMaKC vo 1 + bv или, если пренебречь членом fto* в знаменателе, e, = b-iK-i;). (7-28) Вещественная часть выражения (7-28) равна относительной амплитудной погрешности ТА от изменения скорости, а мнимая часть - фазовой погрешности. Обозначая bi = Re b; fta = Im b, будем иметь A.= b,-{vl-v). (7-29) Определим значение и , при котором относительная амплитудная погрешность е„ будет минимальна. Из формулы (7-29) путем дифференцирования находим, что имеет наибольшее значение при Vm = vjys. Относительная амплитудная погрешность при этом будет (7-30) Относительная амплитудная погрешность при максимальной скорости определяется по формуле (7-29): e =fti(u-ug). (7-31) Очевидно, что выбранная линейная зависимость ЭДС генераторной обмотки является наилучшей, если %т= - \- Подставляя сюда два последних выражения для и е^, приходим к уравнению для определения Vg,: о Отсюда определяют скорость ротора ТА Ок, при которой необходимо компенсировать ЭДС генераторной обмотки, чтобы получить наименьшую амплитудную погрешность от изменения скорости ротора в диапазоне от О до Vq. (1/3 /2)у„. Подставляя эту скорость в формулу (7-30) или (7-31), получим относительную амплитудную погрешность ТА от изменения скорости ИЛИ в процентах e % = 25ft,i. (7.32) Максимальная фазовая погрешность, как видно из выражения (7-29), определяется по аналогичной формуле biX. Используя соотношение (7-32), получаем (7-33) Остаточная ЭДС ТА. Остаточная ЭДС генераторной обмотки возникает вследствие технологических погрешностей при изготовлении ТА. Как показывает анализ, остаточная ЭДС содержит основную временную гармонику и высшие гармоники. Значение основной гармоники в общем случае зависит от углового положения ротора. Формулу для ост можно записать в виде ост - £пост Ь Е  вых ~Ernpuv>0  Рис. 7-15. Постояииая составляющая остаточной ЭДС ТА Ер при v<0 Рис. 7-16. Влияние остаточной ЭДС ТА иа симметрию выходной характеристики где £пост - постоянная составляющая остаточной ЭДС, не зависящая от углового положения ротора; пер - переменная составляющая, изменяющаяся при повороте ротора ТА. Постоянная составляющая остаточной ЭДС £пост сдвинута по фазе относительно напряжения возбуждения на некоторый угол фост (рис. 7-15), который зависит от различных факторов: типа магнитной асимметрии магнитопроводов, наличия короткозамкну-тых витков, емкостных связей между обмотками и т. п. Большое значение шст приводит к тому, что выходная характеристика ТА Ёьых = JSnocT -f = f.{v) оказывается несимметричной (рис. 7-16). Для уменьшения пост применяют ряд методов: 1. Включение последовательно с генераторной обмоткой ТА компенсирующего устройства {КУ) с выходной ЭДС, находящейся в противофазе с пост (рис. 7-17). 2. Размещение обмоток ТА на различных элементах магнитопровода для изменения взаимной индукции между ними, например внутренний магнитопровод может слегка поворачиваться с помощью специального эксцентрика. При этом компенсируется толнко составляющая остаточной ЭДС, находящаяся в фазе с ЭДС обмотки возбуждения (рис. 7-18). тост! А'У Г~ Рис. 747. Уменьшение остаточной ЭДС с помощью компенсирующего устройства  Рис. 7-18. Компенсация остаточной ЭДС за счет поворота внутреннего сердечника 3. Размещение по оси генераторной обмотки ТА компенсирующих обмоток / и (рис. 7-19). Одна из обмоток питается непосредственно от сети через большое активное сопротивление /?з.  г Рис. 7-19. Уменьшение остаточной ЭДС с помощью компенсирующих обмоток Рис. 7-20. Электрическая схема ТА с асимметричным ротором другая - ОТ .напряжения на небольшом активном сопротивлении Rx, включенном последовательно с обмоткой возбуждения ТА. Подбирая сопротивления R-, Rvi Rvl переключая концы обмоток, можно создать НС, имеющую произвольную временную фазу, и тем самым скомпенсировать любую постоянную составляющую остаточной ЭДС. Естественно, что все указанные методы дают удовлетворительный результат, если остаточная ЭДС стабильна. В противном случае необходима периодическая регулировка ТА. Переменная составляющая остаточной ЭДС Ё^р обусловлена электрической асимметрией ротора, которая эквивалентна некоторому короткозамкнутому витку в симметричном роторе, создающему взаимную индукцию между обмотками ТА как функцию угла поворота ротора (рис. 7-25). Для уменьшения Переменной сО ставляющей остаточной ЭДС следует увеличить число пар полюсов ТА. Значительного ее уменьшения можно достигнуть симметрированием ротора, которое сводится к механическому удалению части металла с поверхности полого ротора ТА в месте образования условного короткозамкнутого витка. Погрешности ТА от изменения температуры. Как видно из формулы (7-21), зависимость коэффициента а от температуры выражена черет параметры ij) и р. После преобразования получим (7-34) Найдем относительное изменение коэффициента а: др+2ДМ)+5(1+-1-)Ар-/[(р- -)Д^ + Р + 2г|) + (Р--L. + /l + 2g-,(p--i-J Вещественная часть Аа/а равна относительной амплитудной погрешности ТА от изменения температуры, а мнимая-фазовой погрешности. В ойдем случае для любых значений безразмерных параметров , и Р выражения получаются весьма громоздкими. Однако для счетно-решающих ТА, в которых погрешности от изменения температуры имеют важное значение, можно сделать существенные упрощения. По условиям получения минимальных амплитудных и фазовых погрешностей ТА от изменения скорости требуется Ь < 1 или, как это следует из второй формулы (7-21), ф С Р и I р. При этих условиях er = Re #(Ц-#) + р J р Афт = Im + P[(H-2g)(H-g)--2>>*P]}. (7-35) Для получения больших р ротор счетно-решающих ТА выполняется из материала с высоким удельным сопротивлением (спец- 1 ... 6 7 8 9 10 11 12 ... 18 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |