


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 ... 5 6 7 8 9 10 11 ... 18 Угол ао выбирается так, чтобы в начале и в конце межкоммутационного интервала были равны ЭДС (0) = Е^ (ак); учитывая, что к = л/3, находим, cos ( о-я/3) = cos ао; отсюда ао = я/6 и -СФ(0рСО5(а--); аналогично Mi2 = (6-5) (6-6) 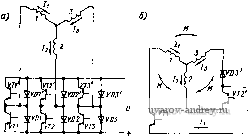  унт Рис. 6-11. Принципиальная электрическая схема статора трехсекциониого двигателя с реверсивным питанием (а); схемы замещения (б и в) При соединении секций звездой при нереверсивном питании (см. рис. 6-7) в образовании момента всегда участвует только одна секция. В этом случае ак = 2я/3 и ао = я/6; поэтому £i = CO<OpCos(a-л/3); Mi = CO/iCos(a-n/3) I при о < а < 2л/3. Для простейшего односекционного двигателя ак = л и ао = 0; при этом из формул (6-3) получаем £i = COft)pCos(a-л/2); М1 = СФ/1С08(а-л/2) } при о а < л. Из приведенных выражений для момента следует, что он зависит от тока, потребляемого двигателем. В свою очередь, этот ток может быть найден, если известны токи отдельных секций двигателя на межкоммутационном интервале ак. Рассмотрим метод нахождения токов двигателя на примере трехсекциониого двигателя с реверсивным питанием и соединением секций звездой. На рис. 6-П,а представлена принципиальная электрическая схема такого двигателя, которая отличается от аналогичной упрощенной схемы (см. рис. 6-8) наличием диодов, необходимых для снятия перенапряжений с переключающих силовых тран- Зйсторов коммутатора в момент отключения секций и для создания условий использования электромагнитной энергии, накопленной к моменту очередной коммутации в отключаемой секции. Поскольку в установившемся режиме работы все процессы в двигателе являются периодическими, с периодом, равным межкоммутационному интервалу ак (в данном случае ак = л/3), достаточно определить токи и моменты двигателя в пределах только одного интервала поворота ротора ак. Свяжем начало этого интервала с положением, которое занимает ротор на рис. 6-8, когда указанный на рисунке сектор датчика положения ДЯ выходит из взаимодействия с чувствительным элементом 3, транзистор VT3 запирается и секция 3 обмотки отключается. Одновременно появляется сигнал на элементе 1, отпирается транзистор VT1, и секция 1 подключается к источнику питания. Транзистор VT2 на протяжении всего интервала О < а < л/3 остается открытым, поскольку элемент 2 датчика положения находится в зоне указанного сектора ДЯ. После отключения секции 3 в схеме на рис. 6-П, б благодаря диоду VD3 создается контур для протекания тока, состоящий из секций 3 и 2, открытого транзистора VT2 и открытого диода VD3. В таком замкнутом контуре исключается скачок тока в секции 3- в момент ее отключения от источника, а значит, и перенапряжение на транзисторе VT3, обусловленное ЭДС самоиндукции Ldljdt, которое при отсутствии диода VD3 теоретически может достигать бесконечного значения (мгновенный разрыв цепи с током /3). Практически это перенапряжение может оказаться достаточным для пробоя транзистора VT3 и выхода его из строя. Второй контур на рассматриваемом интервале угла поворота ротора образуется из подключенной секции /, секции 2, открытых транзисторов VT1 и VT2 и источника питания , с напряжением U. Схема замещения двигателя, содержащая два названных контура, представлена на рис.6-П, б. Ток /3, замыкаясь по первому контуру (секции 3, 2, транзистор VT2, диод VD3), спадает до нуля. Этот процесс занимает время, соответствующее некоторому углу поворота ротора а^, после чего эквивалентная схема (на рис. 6-П, в), содержит только один контур, состоящий из секций i и 2, подключенных к источнику питания через открытые транзисторы VT1 и VT2. 1роцесс на межкоммутационном интервале следует рассматривать состоящим из двух этапов. На первом этапе, когда угол поворота ротора изменяется в пределах О а < а^, происходит спадание тока в отключенной секции от некоторого значения /з(0) до нуля и нарастание тока 1 в подключенной секции от нуля до /1 (ai). На втором этапе, когда изменение угла а лежит в пределах а^ < а < л/3, ток в подключенной секции продолжает нарастать от /1 (ai) до /1 (л/3). В силу периодичности электромагнитных процессов в двигателе на концах межкоммутационного интервала имеет место соотношение /з(0) = /1(я/3). (6-9) Запишем уравнения равновесия напряжений для двух названных этапов в зависимости от угла поворота ротора на межкоммутационном интервале, исходя из следующих допущений: 1) падение напряжения на транзисторах и диодах в открыт0м состоянии, а также внутри источника пренебрежимо мало; 2) процесс отпирания и запирания транзисторов происходит мгновенно; 3) в каждый момент времени в открытом состоянии находятся два транзистора; 4) скорость двигателя в установившемся режиме постоянна; 5) индуктивность и взаимная индуктивность элементов обмотки двигателя не зависят от положения ротора; 6) индуктивность и взаимная индуктивность секций, а также их активные сопротивления одинаковы и равны соответственно L, М, г; 7) эффектом наведения токов в теле постоянного магнита, обусловленным лзменением тока в обмотке статора, пренебрегаем, при этом поток магнита считаем постоянным. Эти допущения обычно оправдываются с достаточной для практики точностью. При сделанных допущениях на первом этапе движения ротора (О < а < а,) уравнения ЭДС и токов контуров, изображенным на рис. 6-И, б, имеют вид (L + M)(h + h) + r{I, + I,) + E = 0; (L + M) (I, + h) + /(/! + h) + = U\ (6-10) Для решения системы уравнений (6-10) удобно ввести новые переменные Подставляя в (6-10), получаем систему двух уравнений pwpjL + M) dl г da p(i>p(L-+M) + / = -(-£i.). (6-11) ЭДС определяется no формуле (6-5), a ЭДС 3 - путем замены в этой формуле а на а + я/3. Решая уравнения (6-11) при начальных условиях / (0) = /а (0) + /3 (0) = 2/3 (0); / (0) = I, (0) + /з (0) = h (0) = /3 (0) (в начальный момент времени секции 2 и 3 имеют одинаковый тек; ток в подключаемой секции 1 равен нулю), найдем значения токов во всех секциях двигателя на первом этапе межкоммутационного интервала О < а < а,: /1= -7 - 3 /2 = /з = (6-12) С учетом последнего выражения получаем уравнение для определения угла а при котором ток в отключаемой секции упадет до нуля (6-13) На втором этапе движения (а, < а < я/3) уравнение ЭДС для контура, изображенного на рис. 6-11, в, имеет вид 2{L + M) + 2r/i = t/-£i2- Вводя, как и выше, новую переменную а = рсор получим pWpjL + M) dfi . . 1 + /1 = (U-Ег,). (6-14) Начальным условием для этого уравнения будет -Г (а,) или, если использовать соотношение (6-13), /1 ( 1) = / (а^). Решение уравнения (6-14), если ЭДС определить по формуле (6-5), дает зависимость тока /1 от угла а на втором этапе движения. Из условия (6-9) по известному а, можно определить ток /з(0), который протекает в секции 3 в момент ее отключения. Зная значения токов на межкоммутационном интервале а^, нетрудно найти по формуле (6-6) электромагнитный момент двигателя. Для первого этапа движения ротора (О < а < а,) M = Mi2 + M23=-CO[/iCos(a-) + /,cos(a+ (6-15) Для второго этапа движения ротора (а, < а < л/3) M = Mi2= -CO/iCos(a-y (6-16) Показав ход вычисления токов и моментов двигателя, нет необходимости приводить их полные выражения ввиду громоздкости оконча- тельных формул, получаемых при решении уравнений (6-11) и (6-14). Эти решения не вызывают принципиальных затруднений. Подход к определению токов и моментов для других схем двигателей остается таким же, как и для рассмотренного трехсекциониого двигателя, однако исходные системы уравнений для первого этапа движения ротора могут оказаться более сложными ввиду несимметрии расположения коммутируемых секций по отношению к элементам обмоткн. 6-4. Рабочие характеристики Из рабочих характеристик двигателя рассмотрим две: механическую характеристику и зависимость КПД от угловой скорости. Уравнение механической характеристики двигателя находим, приравнивая в установившемся режиме момент нагрузки на валу M среднему за межкоммутационный интервал электромагнитному моменту двигателя; 1 к Мн = Мер =- j М (а) da, к о (6-17) где М (а) - электромагнитный момент на межкоммутационном интервале. Применительно к рассмотренному в предыдущем параграфе примеру будем иметь га, а, п/3 Мн = Мср = - J Mi2(a)da-f [ M23(a)da-f f :Mi2(a)da . я Lo 6 a, J с учетом (6-15) и (6-16) получим 2п J l[ cos --da -f ./3 cos -f da. -f + J l\cos(a-~-yda (6-18) В это выражение подставляем значения тока Ii на соответствующем интервале движения ротора. Окончательное выражение среднего электромагнитного момента имеет при строгом рассмотрении весьма сложный вид, нз которого обнаруживается влияние эквивалентной индуктивности обмоткн La = L -{- М на средний момент, что приводит к падающему характеру зависимости момента от угловой скорости Шр. В классе двигателей, имеющих в качестве ротора постоянный магнит с малой магнитной проницаемостью материала р индуктивность обмоткн весьма мала, и поэтому малым оказывается параметр tg фэ = рМр (Z, -f М)/г, входящий коэффициентом при первых производных токов в уравнения (6-И), (6-14). Для двигателей малой мощности, до нескольких десятков ватт, tg Фэ 1. Если пренебречь этой величиной, исходные уравнения существенно упрощаются, длительность первого этапа 1, на котором ток в отключаемой секции спадет до нуля, обратится в нуль (мгновенное исчезновение тока), а ток в подключаемой секции будет отвечать уравнению /i = (I/-£)/гэ, где гэ - эквивалентное активное сопротивление коммутируемых секций; Е - противо-ЭДС. Для рассматриваемого двигателя с тремя секциями, включенными в звезду, и реверсивного питания /1 = СФШр cos Я б (а) da. Подставляя сюда значение Mj j (а) из формулы (6-6) с учетом последнего выражения для тока /i, будем иметь Щ м ср 2п SCOS fa - V СФШр X п/З 5 cos (a--) da Выполняя интегрирование, получим  Рис. 6-12. Механическая характеристика двигателя Мср= Мн = 3 Уз СФи 4п - (О (6-19) При пренебрежении индуктивностью обмоток механическая характеристика двигателя линейна относительно угловой скорости ротора (Ор, как и у обычного двигателя постоянного тока с независимым возбуждением. Полагая в (6-19) Мн = О, находим угловую скорость холостого хода (Оро = и/{С'Ф), (6-20) где я -f 3 ]/ 3/2 4Уз С ж 0,83С. Аналогичные соотношения можно получить для бесконтактных двигателей с другим числом секций при различных способах коммутации обмоток. Для приближенной оценки влияния индуктивности обмоток на механическую характеристику двигателя вводят коэффициент (фэ) 1. учитывающий уменьшение момента от ЭДС самоиндукции обмоток: Мн = МсрА;л (Фэ). (6-21) Удовлетворительные результаты получаются, если принять k (фэ) = = cos фэ, причем фэ определяется формулой Учет индуктивности показывает, что механическая характеристика двигателя (6-21) отличается от линейной (6-19). На рис. 6-12 1 - линейная характеристика при пренебрежении индуктивностью; 2 - характеристика, учитывающая влияние индуктивности. Обе характеристики имеют две общие величины: пусковой момент и скорость идеального холостого хода. На- личие этих общих величин понятно: при М„ = Мер. (Ор = О и cos фэ = 1; при Мн = О Мр = (Оро определяется по формуле (6-20) независимо от значения км (Фэ)- КПД бесконтактного двигателя постоянного тока без учета добавочных потерь можно приближенно оценить по формуле Т) = МсрСОр/Рер, (6-22) где Рср - средняя за межкоммутационный интервал потребляемая мощность к J э 1 к J Для рассматриваемого нами трехсекционного двигателя получаем ъУг СФи 3 f, , 31/3 С2ф2 L 4п V 2п ) г 2г (6-23) Введя относительную угловую скорость (в долях скорости холостого хода) V = (Ор/шро, формулу (6-23) можно привести к более простому виду \ = -i= v. (6-24) где fli ж 1,02. Формула (6-24) показывает, что КПД идеализированного бесконтактного двигателя определяется таким же выражением, как и КПД идеализированного коллекторного двигателя постоянного тока. 6-5. Стабилизация и управление скоростью двигателя Если рассмотреть структурную схему бесконтактного двигателя (рис. 6-13, а), состоящую из коммутатора К, собственно двигателя Д и датчика положения ДП, то можно видеть, что схема содержит две цепи, воздействующие на коммутатор, который распределяет поток мощности по секциям двигателя. Первая цепь - силовая и подключена непосредственно к источнику силового питания U, а вторая - слаботочная цепь обратной связи / (а), идущая с выхода датчика положения ротора и воздействующая на те или иные транзисторы коммутатора в зависимости от углового положения а ротора по отношению к статору. Наличие этих цепей дает возможность управлять скоростью двигателя двумя методами: путем воздействия на силовую цепь или на цепь обратной связи. На рис. 6-13, а показана схема первого метода управления, при котором управляющий усилитель У, рассчитанный на пропускание полной мощности, потребляемой двигателем во всех режимах, включен между источником силового питания U и коммутатором К- В результате поступления сигнала управления Uy на вход регулятора на его выходе вырабатывается управляющая выходная функция / (f/y), воздействующая на коммутатор. Усилитель У может быть линейного, релейного или импульсного типа, что определяет регулировочные характеристики двигателя. В случае линейного усилителя, когда f Фу) - kyUy, к коммутатору, а следовательно, и на обметку двигателя подается напряжение, линейно изменяющееся с изменением сигнала управления Uy. При этом если речь идет о малых двигателях с постоянными магнитами, в которых влияние индуктивности пренебрежимо мало, скорость двигателя изменяется линейно в зависимости от управляющего сигнала, что соответствует полученной выше характеристике (6-19). а) Uy к Рис. 6-13. Схемы управления скоростью двигателя: а - при воздействии на силовую цепь; б - при воздействии иа цепь обратной связи Ж
Рис. 6-14. Зависимости управляющих импульсов и тока в обмотках двигателя от времени На рис. 6-13, б изображен второй метод управления, при котором воздействие на коммутатор К осуществляется по слаботочной цепи обратной связи. Усилитель У, включенный в эту цепь, управляет сигналом малой мощности и поэтому может быть выполнен на значительно меньшую установленную мощность, чем на схеме рис. 6-13, а. Схема рис. 6-13, б оказывается особенно простой при релейных и импульсных способах управления двигателем, при которых отключение цепи обратной связи приводит к торможению двигателя, а включение цепи - к его разгону. Рассмотрим характеристики, получаемые, при некоторых способах импульсного и релейного управления скоростью. Пусть управляющая функция / {Uy) представляет собой импульсную функцию с периодом Ту (рис. 6-14). Длительность импульса в зависимости от управляющего сигнала может быть записана в виде соотношения = kUy, причем О < у < Гу. Ток, протекающий по обмотке двигателя, в результате воздействия импульсной функции на коммутатор К по каналу обратной связи (см. рис. 6-13, б) будет представлять собой последовательность импульсов того же периода Ту. Поскольку частота 1/Гу импульсной функции может быть достаточно высокой, фронт импульсов тока двигателя не будет крутым, так как будет сказываться влияние индуктивности обмотки двигателя. В зависимости от высоты импульсов тока и их длительности будет изменяться среднее значение электромагнитного момента и вид механической характеристики. На рис. 6-15 приведены примерные кривые механических и регулировочных Характеристик бесконтактного двигателя в относительных единицах. Здесь v&p/apo, l. = MJM ср, у = - ty/Ty. Регулировочные характеристики двигателя, как правило, нелинейны. Нелинейность характеристик особенно заметна при малых моментах нагрузки (ц.н<0,2). Здесь незначительное приращение сигнала может привести к резкому изменению угловой скорости, что затрудняет глубокое и устойчивое регулирование скорости двигателя. Практически данный способ импульсного регу- 7,0 0,8 0,6 О 0,2 д4 0,6 0,8 1,0  0,2 /7, 0,6 0,8 1,0 Рис. 6-15. Механические и регулировочные характеристики двигателя лнрования не позволяет обеспечить кратность изменения скорости 1520. Значительно большими возможностями обладает релейно-им-пульсное регулирование с обратной связью по угловой скорости. На рис. 6-16, а изображена структурная схема такого регулирования. Двигатель Д имеет измерительный тахометрический узел в виде встроенного тахогенератора ТГ. В качестве сигнала тахогенератора в некоторых случаях может &лть использована ЭДС пассивных секций обмотки, пропорциональная скорости юр. Сигнал тахогенератора поступает на узел сравнения (сумматор) J), где сравнивается с сигналом управления (7у. Разность этих сигналов поступает на релейный полупроводниковый усилитель Р, включен-ный-в цепь датчика положения ДЯ. Если релейный усилитель имеет характеристику, показанную на рис. 6-16, б, то срабатывание реле, приводящее к включению двигателя, происходит при сигнале Oi, а отпускание реле, соответствующее отключению двигателя, при сигнале о%. Таким образом, реле имеет гистерезис -©2 и зону нечувствительности о^. В результате в установившемся режиме при подаче на вход системы сигнала управления {/у скорость двигателя совершает колебания между двумя крайними порого- выми значениями, соответствующими уровням настройки реле Oi и а2- Имеем очевидные соотношения a2=f/y -*,<0р2, j где - крутизна ЭДС тахогенератора. 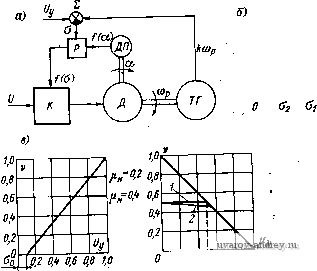 Жор\¥ 0,8 1,0 Рис. 6-16. Релейно-импульсное регулирование скорости двигателя: а - структурная схема; б - характеристика релейного усилителя; в - механические и регулировочные характеристики Складывая эти выражения, находим, что средняя угловая скорость в автоколебательном установившемся режиме будет topi -f 0)р2 L/y 01 - 2 -о **р. ср---------- - -- ity- cpl- 2 К 2ke ke (6-26) Отсюда видно, что средняя скорость двигателя изменяется линейно по отношению к изменению управляющего сигнала Uy. Наличие гистерезиса и зоны нечувствительности, среднее значение которой равно (Oi -- а2)/2, приводит к тому, что регулировочная характеристика v = / (t/y), построенная по формуле (6-26) на рис. 6-16, в, проходит не через начало координат. На рис. 6-16, в все величины нанесены в относительных значениях: скорость v = = (Ор/соро. момент нагрузки fin = Л1 Шп, сигнал управления Uy = t/y/(fejft)po). Из графика v ([д,н) видно, что линейная регулк-ровочная характеристика имеет горизонтальные участки, которые ограничивают максимальную скорость двигателя в зависимости от нагрузки на валу. Так, например, если нагрузка двигателя [Хн = = 0,2, то его скорость в режиме регулирования не может превзойти скорости, соответствующей точке на естественной механической характеристике V = 1-[д-н = 1-0,2 = 0,8. Эта обстоятельство получило отражение на левом графике рис. 6-16, в для различных нагрузок на валу. На правом графике приведена искусственная механическая характеристика /, показывающая, что при данном управляющем сигнале Uy в, диапазоне нагрузок О < [Хн < [д-н. макс средняя скорость двигателя сохраняет строго постоянное значение, т. е. характеристика является абсолютно жесткой. Это согласуется и с формулой (6-26), в которой средняя скорость в режиме управления не зависит от нагрузки, если [д-н < [Хн. макс, а определяется только значением управляющего сигнала. В реальных условиях искусственная механическая характеристика не является абсолютно жесткой и соответствует прямой 2, наклон которой, определяющий степень жесткости, зависит от ряда факторов, важнейшие из которых пульсация напряжения тахоге-нератора и запаздывание, вносимое индуктивностью обмоток, емкостью фильтров в канале управления. Даже при строго постоянном управляющем сигнале эти факторы совместно с температурной погрешностью параметров элементов схемы не позволяют на практике обеспечить точность стабилизации скорости двигателя выше чем 0,3-0,5*%. Во многих случаях эта точность является вполне достаточной. В режиме регулирования скорости, когда сигнал Uy может измениться, рассматриваемая система обеспечивает регулирование скорости с кратностью 100-200, однако на малых скоростях обычно наблюдается неравномерность вращения двигателя. Неравномер-\ ность вращения в автоколебательном установившемся режиме оценивается как отношение Мр2 - tOpl рср Воспользовавшись формулой (6-26), получаем соДр Oi - 02 Да feeCOp. ср ip. ср feeCOp. ср (6-27) Отсюда следует, что меры, уменьшающие нерайномерность вращения при малых скоростях сор. ср, должны быть направлены на уменьшение зоны гистерезиса релейного усилителя Ао и увеличение крутизны сигнала тахогенератора k. Система стабилизации скорости, обеспечивающая значительно более высокую точность, чем в предыдущем примере, основывается на сравнении эталонной частоты задающего генератора и частоты, пропорциональной скорости двигателя. Если при этом в системе отсутствует преобразование дискретных величин в аналоговые а значит, не появляются дополнительные погрешности, то в принципе удается получить точность стабилизации скорости двигателя, определяему|о точностью задания частоты эталонного генератора, которая может быть весьма высокой (например, если использован кварцевый генератор). Структурная схема такой системы изображена на рис. 6-17, а; она аналогична рассмотренной ранее схеме на рис. 6-16, а. Отличие заключается в том, что вместо тахогенератора двигатель имеет датчик импульсов ДЯ, частота которых строго пропорциональна скорости двигателя. В частном случае таким датчиком импульсов может служить датчик положения ротора. При вращении двигателя импульсы ДЯ поступают на логическую схему Л, где их частота сравнивается с частотой импульсов задающего генератора ЗГ. Логическая схема построена так, что при л ппп г- Р ш ш fsr fun шшшшш Рис. 6-17. Стабилизация скорости двигателя с помощью эталонного генератора частоты: а - структурная схема; б - переходный режим; в - установившийся режим far ¥=!ди каждый импульс ЗГ формирует фронт импульсной функции о, а каждый импульс ДЯ формирует спад. В результате на релейный усилитель Р поступает периодическая последовательность импульсов функции а, приводящая к попеременному включению и отключению двигателя. В переходном режиме, когда скорость двигателя меньше стабилизируемого значения (/зг>/ди), последовательность импульсов ЗГ, ДИ и импульсная функция включения имеют вид, представленный на графике рис. 6-17, б. Под действием импульсов момента скорость двигателя возрастает до тех пор, пока не наступит неравенство частот [зг<-!ди- После этого логическая схема Л перераспределяет команды на включение и отключение таким образом, что уже импульс ДЯ формирует фронт импульсной функции о, а импульс ЗГ- ее спад. При этом сама функция меняет знак, и момент двигателя становится тормозящим, с тем чтобы обеспечить снижение скорости двигателя. По окончании переходного процесса в системе устанавливается периодический импульсный режим, при котором fgp = fдpl, т. е. обеспечивается требуемая стабилизация скорости, основанная на автоматической синхронизации частоты ДЯ с частотой задающего генератора. Длительность импульсов а в установившемся режиме зависит от нагрузки на валу двигателя, причем логическая схема Л всегда приводит систему в состояние равновесия, при котором длительность импульса строго отвечает этой нагрузке. Система, построенная по данному способу, перспективна для создания высокоточных схем стабилизации скорости бесконтактных двигателей постоянного тока. В режиме управления скоростью, как правило, необходимо обеспечивать реверс двигателя. Для этого в общем случае требуется пфеключение секций Обмотки статора, связанное с изменением полярности управляющих импульсов. Можно указать следующие способы реверса, считая, что полярность магнита ротора не меняется: 1) взаимное переключение начал и концов всех, секций обмотки; 2) изменение полярности подводимого к коммутатору напряжения в случае использования в коммутаторе биполярных ключей переменного тока; 3) переключение чувствительных элементов датчика положения или входных цепей коммутатора. При всех пфечисленных способах возможны разнообразные технические решения, которые зависят прежде всего от типа используемых элементов датчика положения и пфеключателей. Описанные способы управления скоростью бесконтактных двигателей постоянного тока показывают большие возможности этих двигателей для использования их в различных системах автоматики и приборной техники. 6-6. Датчики положения Этот элемент двигателя служит для определения относительного положения осей магнита ротора и статорных обмоток двигателя и для управления схемой коммутатора. Датчик положения должен удовлетворять довольно сложному комплексу требований, а прежде всего должен иметь небольшие размеры и быть экономичным. Особое внимание при проектировании датчика необходимо уделять возможно большей кратности максимального и минимального выходного сигнала, а также большой крутизне нарастания и спада сигнала, что позволяет без дополнительных усложнений схемы коммутатора предусмотреть работу транзисторов в наиболее надежном и экономичном режиме пфеключения. Важным условием является согласование датчика с входными цепями коммутатора. Самое широкое распространение получили бесконтактные датчики, работающие на переменном токе: индуктивные и трансформаторные. Обилие конструктивных и электрических схем этих датчиков и использование их в самых разнообразных приборах и устройствах объясняется простотой исполнения, высокой надежностью и экономичностью. Из датчиков, работающих на постоянном токе, используются генераторы Холла и магниторезисторы. Их применение в двигателях с вращающимся магнитом ротора естественно, так как управ- ляющим параметром для них является магнитный поток. Однако генераторы Холла еще довольно дороги и не всегда имеют удовлетворяющий по мощности выходной сигнал, а магниторезисторы обладают неудовлетворительными частотными свойствами и недостаточной кратностью изменения сопротивления. Рассмотрим устройство и принцип работы датчиков положения, выполненных в виде управляемых дросселей и трансформаторов насыщения. Конструкция датчика положения с дросселями насыщения для четырехполюсной машины показана на рис. 6-18. Обойма 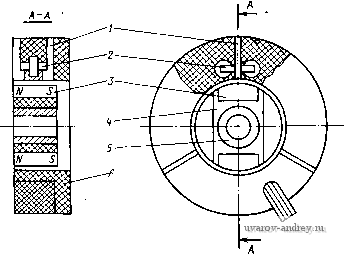 Рис. 6-18. Датчик положения с дросселями насыщения / - магиитопровод; 2 - дроссель насыщения; 3 - постоянные магниты; 4 - экранирующие пластины; 5 - втулка; 6 - обойма датчика 6 содфжит L-образные магнитопроводы У и дроссель насыщения 2. Сердечник дросселя может быть любой формы, в частности лучше использсюать ферритовые кольца с прямоугольной петлей гистерезиса сфийного производства. Обмотка дросселя наматывается на Сфдечник с двух краев так, чтобы он непосредственно мог касаться L-образных магнитопроводов. Применением последних позволяет расположить сердечник дросселя так, что уменьшается диаметр обоймы датчика и обеспечивается гарантированный зазор между обоймой и якорем путем расточки внутреннего цилиндра обоймы. При этом исключается передача механических усилий на сердечник и его повреждение, а следовательно, и изменение магнитных свойств. Дроссель заливается компаундом, что в значительной степени повышает надежность конструкции. Ротор датчика изготовляется из немагнитного материала прессованием или литьем, при этом ротор содержит постоянные магниты 3 в виде сегментов, экранирующие пластины 4 и втулку 5. Цилиндрическая поверхность ротора обрабатывается после на- прессовки его на вал двигателя одновременно со шлифовкой магнита ротора и шеек вала под подшипники. Применение в роторе ферромагнитных пластин 4 позволяет экранировать потоки рассеяния магнитов и значительно повысить крутизну нарастания и спада выходного сигнала дросселя. Одна из схем подклк)чения дросселя датчика к коммутатору показана на рис. 6-19, а. Обмотка дросселя датчика положения и обмотка питания высокочастотного генератора соединены последовательно и включены на вход выпрямительного моста. Нагрузкой моста является входной транзистор силового ключа коммутатора. е 7 37 П и п в □ Рис. 6-19. Схемы подключения датчиков к коммутатору: а - дроссельного; б - трансформаторного При насыщении сердечника дросселя потоком постоянного магнита якоря датчика резко уменьшается индуктивное сопротивление дросселя и почти все напряжение питания датчика прикладывается через выпрямительные диоды к нагрузке. Когда сердечник не насыщен потоком постоянного магнита, сопротивление дросселя велико и к нагрузке прикладывается не(5ольшое напряжение, которое в схеме коммутатора может быть полностью скомпенсировано. На рис. 6-19, б показана схема включения трансформаторного датчика положения. Первичные обмотки трансформаторов соединены последовательно и подключены к генератору питания датчика с напряжением (/ .д, выходные обмотки через выпрямительные диоды соединены с транзисторами ключей коммутатора. В тех случаях когда сердечник трансформатора датчика не насыщен потоком постоянного магнита якоря, напряжение первичной обмотки трансформируется во вторичную и поступает на соответствующий силовой ключ. Если же сердечник насыщен потоком магнита, то нарушается электромагнитная связь между первичной и вторичной обмоткой и выходной сигнал будет минимальным. Конструктивно датчик с трансформаторами аналогичен дроссельному датчику, за исключением якоря, в котором сигнальный сектор постоянного магнита имеет дугу 2я/р-р, где р - дуга сигнального сектора дроссельного датчика. Основными параметрами, 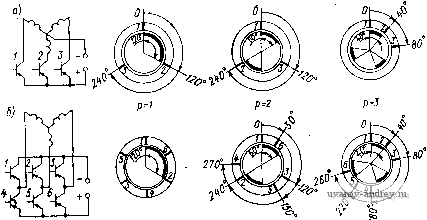 Рис 6-20 Расположение чувствительных элементов трехсекционного двигателя: а - при однополупериодном питании обмотки; б - при двухполупе- риодиом питании 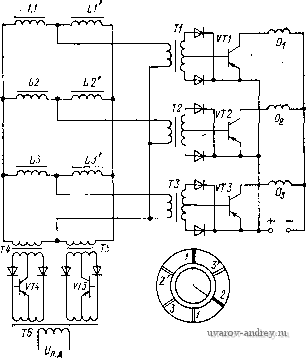 Рис. 6-21. Дроссельный датчик поЛожейиЯ реверсивного двигателя с трехсекционной обмоткой 6 Заказ № 678 определяющими качество дросселя Или трансформатора, счйтаюй кратность тока в сопротивлении нагрузки при насыщенном и ненасыщенном сердечнике и выходная мощность. Исследования показали, что частота питания датчика должна быть в пределах 30-100 кГц. Повьшение частоты позволяет при заданных размерах дросселя увеличить выходную мощность и уменьшить остаточную ЭДС. Кратность тока в нагрузке дросселя в лучших случаях составляет 100 и более, что вполне удовлетворяет требованиям. Для уменьшения потерь на перемагничивание еле' дует выбирать сердечники с более узкой петлей гистерезиса. Для электродвигателей с различным числом полюсов датчики положения будут отличаться угловым расположением чувствительных элементов в обойме и числом сигнальных секторов якоря. Угловой размер сектора якоря (в радианах) р = 2n/{ps), где s - число секций силовой обмотки. Число сигнальных секторов равно числу пар полюсов р. В качестве примера на рис. 6-20 показано наиболее целесообразное расположение чувствительных элементов трехсекционных двигателей с однополупериодным (а) и двухполупериодным (б) питанием секций для различного числа пар полюсов. В реверсивных управляемых двигателях применяют более слож-ные схемы датчиков положения. Как правило, реверс достигается с помощью двух комплектов чувствительных элементов, сдвинутых относительно друг друга на угол л/р. Направление вращения двигателя зависит от того, на какой из комплектов чувствительных элементов подано питание. Такое решение позволяет упростить схему коммутатора, исключив специальные переключатели выходных концов чувствительных элементов или силовых концов обмотки. На рис. 6-21 приведена схема дроссельного датчика положения реверсивного двигателя с трехсекционной обмоткой и однополупериодным питанием секций. Датчик содержит комплект дросселей L1-L3 правого вращения и комплект Ы'-ЬЗ левого вращения. Питание дросселей осуществляется от двух трансформаторов Т4, Т5, первичные обмотки которых подключаются к выходным обмоткам трансформатора Т6 генератора питания датчика с помощью ключей переменного тока - правого (транзистор VT4) и левого (транзистор УГ5) вращения. Применение на входе транзисторных ключей VT1-VT3 трансформаторов Т1 - ТЗ позволяет существенно уменьшить число выходных концов датчика положения. 6-7. Полупроводниковые коммутаторы Одновременно с выполнением своей основной функции - переключения силовой обмотки по сигналам датчика положения - схема коммутатора должна позволять наиболее простым способом управлять двигателем: регулировать скорость, осуществлять реверс, пуск и остановку, причем с возможно меньшими потерями энергии. Независимо от типа используемой обмотки схемы отдельных ключей коммутатора могут быть одинаковы, Это обстоятельство существенно упрощает изготовление, эксплуатацию и расчет транзисторного коммутатора бесконтактного двигателя. Следовательно, основным в задаче построения схемы коммутатора является разработка управляемого от датчика положения бесконтактного экономичного ключа, способного надежно коммутировать обмотку двигателя. Большая кратность сопротивления транзисторов в запертом и открытом состоянии, хорошие частотные свойства и полная управляемость обусловили их подавляющее применение в коммутаторах бесконтактных двигателей постоянного тока. Использование тиристоров в коммутаторах рационально только при повышенных напряжениях питания (выше 100 В) и для больших мощностей машин, так как падение напряжения на силовом переходе у тиристоров примерно в 4-5 раз выше, чем у транзисторов; кроме того, из-за специфических свойств тиристоров возникают дополнительные трудности при построении тиристорных коммутаторов, управляемых по скорости двигателей. Применение кремниевых силовых транзисторов снижает КПД, поэтому использовать их следует только для коммутаторов, рассчитанных на работу при температуре выше 50-60 °С. Полупроводниковый коммутатор в зависимости от назначения двигателя содержит различные узлы. Для управляемых двигателей основными узлами коммутатора являются: силовые ключи коммутации обмотки, генератор напряжения питания датчика положения, регулятор скорости. Схемы силовых транзисторных ключей. Силовые транзисторы ключей в большинстве случаев должны быть рассчитаны на пропускание максимального тока, определяемого активным сопротивлением коммутируемых секций обмотки двигателя. Максимальное допустимое напряжение перехода эмиттер-коллектор силового транзистора должно быть несколько больше, чем напряжение питания для двигателей с двухполупериодным питанием секций и чем удвоенное напряжение питания для двигателей с однополупериодным питанием. Необходима защита силовых транзисторов ключей от выбросов напряжения в моменты отключения секции, если напряжение питания сравнительно высоко. В мостовых схемах коммутаторов защита осуществляется включением диодов параллельно силовым транзисторам. Для двигателей с однополупериодным питанием секций обмоток наиболее часто применяют два способа защиты. Суть одного из них состоит в том, что секция обмотки или сам транзистор шунтируются цепочкой из последовательно соединенных стабилитрона и диода. Другой способ защиты состоит в том, что секция или транзистор шунтируется цепочкой из последовательно включенных резистора и конденсатора. Рассмотрим некоторые электрические схемы силовых ключей. На рис. 6-22 показаны три принципиальные электрические схемы, которые при соответствующем выборе их параметров могут удовлетворять предъявляемым требованиям. Схема а проста и не требует пояснений, так как содержит всего один силовой транзистор. Две другие схемы собраны на основе составного транзистора; здесь сопротивления, включенные в цепь коллекторов силовых транзисторов, выполняют две функции: выводят силовой транзистор в режим насыщения и выравнивают коллекторные токи, когда параллельно включено несколько транзисторов. Схема составного транзистора в данном случае привлекает vu..m -0 + Рис. 6-22. Электрические схемы силовых ключей: а - с одним силовым транзистором; бив - с составным транзистором  ТОТ Г У . т и -0 + нце и тем, что позволяет автоматически регулировать ток базы силового транзистора ключа пропорционально коммутируемому току. С увеличением мощности двигателей построение схемы ключей может оставаться неизменным, увеличивается лишь число параллельно включенных транзисторов и их мощность. При этом, как уже отмечалось, для обеспечения необходимого входного тока выходная мощность датчика должна увеличиваться. Естественно, что в более мощные двигатели нужно встраивать более мощные датчики положения. Для двигателей, выполняющих сложные функциональные задачи, часто между выходом датчика и входами ключей помеи;аются формирующие, логические, усилительные, регулирующие и другие элементы и узлы, однако их использование каждый раз должно быть оправдано, так как увеличение числа элементов схемы снижает надежность, повышает стоимость и усложняет производство двигателей. Вспомогательный источник питания. Для питания датчика положения ротора переменным напряжением и получения дополнительных источников низкого напряжения постоянного тока, используемых для запирания транзисторов, а также для питания других узлов коммутатора (например, реле управления) в схеме коммутатора используется вспомогательный генератор переменного напряжения прямоугольной формы. Входным напряжением для генератора является напряжение постоянного тока. Из большого числа схем генераторов предпочтительна двухтактная симметричная схема транзисторного преобразователя. КПД таких генераторов, рассчитанных на мощность от долей ватта до нескольких ватт, довольно высок и составляет 60-80 %. Схема имеет небольшое число надежных малогабаритных элементов. В двигателях с дроссельным или трансформаторным датчиком положения частота генератора связана с параметрами чувствительных элементов датчика и, как уже отмечалось, выбирается в пределах от 30 до 100 кГц. Выходная мощность генератора определяется мощностью, необходимой для питания датчика положения, мощностью источников запирающего напряжения и источника питания регулятора скорости. В большинстве случаев регулятор может питаться непосредственно от источника питания двигателя, и поскольку потребляемая им мощность практически не зависит от мощности двигателя, эта мощность в расчетах может учитываться некоторым постоянным коэффициентом. Суммарная выходная мощность генератора в зависимости от мощности двигателя и схемы коммутатора составляет 0,2-3 Вт (для двигателей от 1 до 100 Вт). Пример схемы двигателя с коммутатором. Полная схема двигателя БДСЮ,2 с коммутатором приведена на рис. 6-23. В верхней части рисунка показаны обмотки двигателя Д, тахогенератора ТГ и датчика положения ротора ЦП трансформаторного типа {Т1, Т2, ТЗ). Коммутатор состоит из силовых ключей коммутации секций обмотки двигателя, генератора питания датчика положения и регулятора скорости. На схеме цифрами 1-13 показаны соединения коммутатора с двигателем. Силовые ключи выполнены на транзисторах VT1, VT2 и VT3, на входы которых включены диоды VD5, VD6, VD7 для выпрямления выходного напряжения вторичных обмоток трансформаторов датчика положения ротора. Первичные обмотки трансформаторов Т1, Т2 и ТЗ соединены последовательно и подключены к выходной обмотке Т4 (контакты 9-10) генератора питания датчика, собранного на транзисторах VT5, VT6. Напряжение с цепочки VD19 - C6 служит для запирания силовых транзисторов при отсутствии на их входе сигналов датчика положения. Стабилитрон VD2 и диоды VD1, VD3, VD4 служат 1 ... 5 6 7 8 9 10 11 ... 18 |
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |