


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 ... 4 5 6 7 8 9 10 ... 18 ряду с подшипниками-опорами определяет надежность и срок службы двигателя. На рис. 5-3 приведена конструкция электродвигателя постоянного тока мощностью 200 Вт.   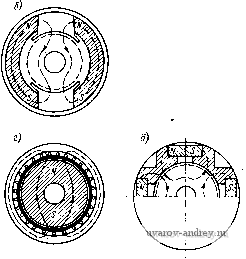 Рис. 5-4. Конструкция магнитных систем двигателей с постоянными магнитами: а - радиальные магниты; б - скобообразные магниты; в - кольцевой магнит; г - внутренний цилиндрический магнит; д - плоские магниты с полюсными наконечниками В двигателях с постоянными магнитами магнитные системы отличаются большим разнообразием; оно связано с тем, что постоянным магнитам, не имеющим обмоток, легче придавать различную форму, чем электромагнитам. На рис. 5-4 приведены некоторые типы магнитной системы двигателей с постоянными магнитами, получившие наибольшее распространение. Магнитная система с радиальными магнитами (рис. 5-4, а) наиболее 4 5 4 у/шг/у/шшттю 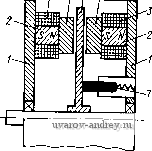 Рис. 5-5. Конструктивная схема дискового двигателя с печатным якорем / - подшипниковые щиты; 2 - постоянные магниты полюсов; 3 - обмотка намагничивания; 4 - полюсный наконечник; 5 - дисковый якорь; 6 - корпус; 7 - щетка Проста; ее главный недостаток - слабая НС магнита и неиспользуемое пространство между полюсами. Магнитная система со скобообразными магнитами (рис. 5-4, б) обеспечивает значительно большую НС и лучшее заполнение пространства между 126 якорем и корпусом; ее недостаток - трудность в создании нужного направления магнитного поля при намагничивании магнитов. Кольцевой магнит (рис. 5-4, в) имеет наиболее простую конструкцию и широко применяется в двигателях малой мощности; вследствие значительного поля полюсов и реакции якоря в коммутационной зоне коммутация в двигателях этого типа сильно затруднена. Магнитная система с внутренним магнитом применяется в двигателях с полым якорем, который выполнен в виде тонкостенного стакана и вращается между неподвижным ярмом и внутренним магнитом (рис. 5-4, г). В качестве материалов для постоянных магнитов применяются магнитно-твердые сплавы с широкой петлей гистерезиса. Качество этих сплавов, так же как и для синхронных двигателей с постоянными магнитами, определяется коэрцитивной силой Не, остаточной индукцией В, и максимальной удельной энергией Шмакс- В остальном конструкция двигателей с постоянными магнитами принципиально не отличается от конструкции двигателей с электромагнитным возбуждением. Рядом зарубежных фирм налажен серийный выпуск двигателей постоянного тока с дисковым печатным якорем. Двигатели этого типа имеют хорошие энергетические показатели и отличные условия коммутации. Роль коллектора в машине выполняюТЛобовые соединения обмоток. Печатная обмотка часто выполняется штамповкой из листовой меди (рис. 5-5). 5-2. Уравнения ЭДС и момента Приложенное к якорю двигателя напряжение равно сумме противо-ЭДС вращения, падению напряжений под щетками, на активном сопротивлении якоря, а также ЭДС самоиндукции: г/=С(0рФ-4-Аг/щ+1л+1, (5-1) для двигателей с параллельным электромагнитным возбуждением и с постоянными магнитами; и = Са>рФ + АОщ + ia (Га + ff) + (La -f Ц (5-2) для двигателей с последовательным электромагнитным возбуждением. Здесь и - приложенное напряжение; ia - ток якоря; Ф - магнитный поток полюсов; Af/щ - падение напряжения под щетками; Га - активное сопротивление якоря; La и Lf - индуктивности якоря и обмотки возбуждения; - активное сопротивление последовательной обмотки возбуждения; Юр - угловая скорость ротора; С = -----постоянная (ЛГ - число проводников об- 2я а мотки якоря, р - число пар полюсов, а - число параллельных ветвей обмотки). Электромагнитный момент двигателя Мэ=ааФ. (5-3) При последовательном электромагнитном возбуждении для ненасыщенной машины можно принять Ф=/1а, где kf-постоянная. Тогда МзсА. (5-4) Уравнение момента двигателя имеет вид con, (5-5) где Мсоп = Мо -Ь Мн - момент сопротивления, равный сумме моментов холостого хода и нагрузки. В установившемся режиме работы (юр = const; ia = Ia = =const) уравнения ЭДС примут вид: для двигателя с параллельным возбуждением {/ = С(ОрФ + А(/щ + /аГа; для двигателя с последовательным возбуждением f/ = Cft)pO + Af/ + /a(/-a+//) (5-6) Выражение для момента у них общее; м,=Мсоп=Мо+Мн=с/аФ=с/оФ+с; Ф. В двигателях малой;мощности с параллельным возбуждением момент холостого хода Mq и соответствующий ему ток холостого хода /о = Мо/(СФ) могут быть сравнимы соответственно с моментом нагрузки и с током якоря /а = /© + /н этого же двигателя. Из уравнений (5-6) находим угловую скорость при холостом ходе и пусковой момент М„ = С/а„Ф=С u - u Щ (5-8) 5-3. Рабочие и пусковые характеристики двигателей с параллельным возбуждением и постоянными магнитами Рабочими характеристиками двигателей постоянного тока называются зависимости юр, h, Рг, Pi и т] от момента нагрузки Ми при постоянном потоке возбуждения Ф и напряжения якоря U. Основными режимами работы электродвигателя являются: режим холостого хода (Мн =0; /д = / ; сор = Юро); режим номинальной нагрузки (Мн = Мидг; 1 = 1,; = copjv); режим максимальной полезной мощности (Pj = Ргмакс); пусковой режим (М = М„; 1а - In, &>р = 0). Рабочие характеристики двигателей расчетным путем определяются по формулам, которые следуют непосредственно из выражений, приведенных в § 5-2: и - Д(/щ- laa = Юро- = (Оро- Ml- Рг = и1а, Л = СФ С=Ф= Ра = Мн(Ор = Мн(Оро - (5-9) Эти характеристики приведены на рис. 5-6. Иногда возникает необходимость построения механических характеристик по данным пускового режима и режима холостого хода. Зависимости (Ор (Мн) н /а (Мн) представляют собой прямые, и их можно построить по опытным данным (U, In, <0р о> Мп) нлн выразить формулами: (Ор = (Оро(1 - Мн/Мп); /а = /о-Ь(/п-/о)Мн/Мп, (5-10) а затем по формулам (5-9) найти Pi (Мн). Pi (Мн). Ti (Мн). Пуск двигателей постоянного тока малой мощности производится непосредственным включением двигателя в сеть. Рассмотрим вначале пуск двигателя в режиме холостого хода, полагая, что индуктивность якоря La мала и ЭДС самоиндукции La - можно не учитывать. dt 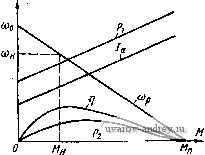 Рнс. 5-6. Рабочие характеристики двигателей с параллельным возбуждением Уравнение ЭДС (5-1) и уравнение момента (5-5) примут вид и = СшрФ + АУщ -f £аГа, г dap =С1 Ф-Ма. (5-11) Представим ток якоря в виде ia= /о + где /о - ток холостого хода. Тогда, учитывая, что С/оФ = М^; V = СмроФ + АУщ + /о Га, получаем СсороФ = СмрФ Ч- ifa, J -- = С(Ф. Исключая ток i из этих уравнений, находим ((Оро -Wp). Согласно (5-7) и (5-8) dt С2ф2 уравнение запишем в виде 5 Заказ № 678 dap dt tOpo f (Op = Wpo (1---[o- , и последнее V, и -Шщ ) (5-12) 129 mJi--Va 4 V и-Аищ) ~ электромеханическая постоянная времени двигатрля Решение дифференциального уравнения fs 12) Wp = й)ро (l - е ~м). --- <щЛ РоР^ двигателя от вре- Учете индуктивности якоря икже Ronn о* оменте нагрузки и Ток в якоре представимте виде °= ° У =я Уравнениями (5-1) и (5-5). ia = /и + ь (6-13) м оиу^а?р\зГвклТч7;1меГ1 -ному 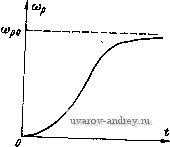 Рис. 5-7. Кривая изменения скорости ротора при пуске двигателя 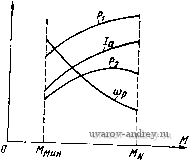 Рис. 5-8. Рабочие характеристики двигателя с последовательным возбуждением -f Га( + СФ((йр (йр ) = о; (5-14) здесь Ир. н - скорость двигателя под нагрузкой Исключая из уравнений (5-14) ток г и обочначяя / магнитная постоянная времени якоря), находим ~ ( Р du)p (Wp - (Bp. h) = 0. Заменяя, как и выше, на на т„, получаем + Wp = Wp. н. Решение этого дифференциального уравнения при нулевых начальных условиях имеет вид = Wp.hl -f (5-15) 1 -оса где Mj и 2 - корни характеристического уравнения ТэТма^ + -f 1 = 0. При Тэ С т„ можно приближенно принять = - 1/тэ; 2 = - 1/Тм. В этом случае формула (5-15) примет вид Г Wd - W р. н (5-16) Тм -Тэ На рис. 5-7 представлена кривая изменения угловой скорости ротора при пуске двигателя. 5-4. Рабочие и пусковые характеристики двигателей с последовательным возбуждением В двигателях постоянного тока с последовательным возбуждением магнитный поток не остается постоянным, а изменяется для ненасыщенных машин пропорционально току якоря. Наибольшие значения магнитного потока возбуждения и момента двигателя будут в пусковом режиме. Режим холостого хода в двигателях этого типа исключен, так как получающаяся при этом скорость ротора весьма велика. Действительно, из формул (5-4) и (5-6) для двигателя последовательного возбуждения получаем и - Uщ - Ia(ra + rf) (У - А(;щ - (Ла-f rf) У (Мо-f МнУСГ УСг{Мо+М„) . (5-17) Отсюда для угловой скорости холостого хода находим (ОрО- -. - Момент сопротивления нагрузки может изменяться от номинального Мни ДО некоторого минимального Ми. мин, при котором угловая скорость не превосходит допустимой для данного двигателя. Расчетные формулы для определения рабочих характеристик двигателя имеют вид Р2 = Мн(0р; PiUIa, У\- (5-18) Зависимость шр от Мн описывается формулой (5-17). Примерный вид рабочих характеристик двигателя с последовательным возбуждением приведен на рис. 5-8. Анализ пускового режима двигателя с последовательным возбуждением в силу нелинейности зависимости момента от тока двигателя в общем виде выполнить нельзя. Уравнения ЭДС (5-2) и момента (5-5) принимают вид и = Ci(Opia + + ia {Га + Г,) + {La + Lf) = Cif-Mc (5-19) Представим ток якоря в виде суммы двух составляющих: ia - ~ h-\-i, где /и - ток якоря, соответствующий данному сопротивлению нагрузки в установившемся режиме. Учитывая, что U = Cicop. и/и + AU + 1 {га + rf), а Cll = = -Мсоп, уравнения (5-19) запишем в виде (La + Lf) --- -f {Га + rf) i -f C,(Bp/ = Ci/ (Cup. H- Cup); p = 2Ci/ t + Cit2. (5-20) Для конкретных значений параметров двигателя и момента нагрузки система дифференциальных уравнений (5-20) может быть решена с помощью АВМ. 5-5. Стабилизация угловой скорости двигателей постоянного тока При изменении напряжения питания и момента нагрузки скорость двигателей не остается постоянной. Зависимость угловой скорости ротора от напряжения и момента сопротивления нагрузки  О 4т Рис. 5-9. Центробежный регулятор скорости Рис. 5-10. Принципиальная схема стабилизированного двигателя с добавочным сопротивлением в цепи обмотки возбуждения для двигателей с параллельным электромагнитным возбуждением и постоянными магнитами определяется выражением (5-9) Из этой формулы следует, что поддержание постоянной скорости ротора двигателей может достигаться путем изменения тока возбуждения для двигателей с электромагнитным возбуждением или изменения активного сопротивления якоря для обоих типов двигателей. Наиболее просто эта задача решается путем включения в цепь возбуждения или якоря дополнительного активного сопротивления с помощью центробежного выключателя (регулятора скорости). Центробежный регулятор скорости выполняется в виде плоской пружины с контактами на конце. Пружина закреплена на диске, который установлен жестко на валу двигателя (рис. 5-9). При не- подвижном роторе, а также при скорости, меньшей чем стабилизируемая, контакт пружины / соединен с неподвижным контактом 2. Когда скорость ротора превышает стабилизируемую, то под действием центробежной силы, приложенной к пружине, ее контакт / соединяется с неподвижным контактом 3. При работе регулятора скорости добавочное сопротивление, включаемое в цепь якоря, 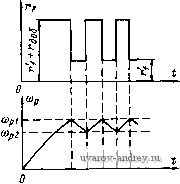 Рис. 5-11. Изменение скорости при включении добавочного сопротивления в цепь обмотки возбуждения Рис. 5-12. Принципиальная схема стабилизации скорости с добавочным сопротивлением в цепи якоря соединяется с контактами / и 2, а добавочное сопротивление в цепи обмотки возбуждения - с контактами / и 5. На рис. 5-10 приведена принципиальная схема стабилизированного двигателя с добавочным сопротивлением в цепи обмотки возбуждения Гдоб- При включении двигателя в сеть его скорость возрастает по кривой 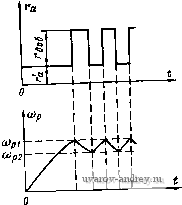 С=£1 Рис. 5-13.. Изменение скорости при включении добавочного сопротивления в цепь якоря Рис. 5-14. Схема стабилизации скорости двигателя с полупроводниковым триодом оазгона (рис. 5-11), соответствующей току возбуждения /f -== (7/(rf Ч- гпоб). Когда скорость достигает некоторого значения Шр, при котором замыкаются контакты / и 3, ток возбуждения увеличивается до =-Vlrf\ это приводит к снижению скорости. При некот6р9Й скорости (0р2 контакты / и 5 разомкнутся, скорость будет вновь возрастать и т. д. Таким образом, скорость вращения ротора двигателя будет совершать колебания около некоторого среднего значения (copi + сйр2)/2, которое принимается за стабилизированную скорость (рис. 5-П). Принципиальная схема стабилизации скорости путем включения добавочного сопротивления в цепь якоря приведена на рис. 5-12. При включении двигателя его скорость увеличивается по номинальной пусковой характеристике, так как добавочное сопротивление отключено (контакты / и 2 замкнуты). При скорости сор i контакты / и 2 размыкаются и последовательно с якорем оказывается включенным добавочное сопротивление; это приводит к уменьшению скорости до некоторого значения сорг, при котором контакты / и 2 вновь замкнутся, а скорость вновь начнет возрастать (рис. 5-13). За стабилизированную принимают некоторую среднюю скорость, примерно равную (copj +сйро)/2. Основные недостатки центробежного регулятора скорости: сравнительно низкая точность стабилизации (1-2 %) и малый срок службы вследствие электрической эрозии контактов. Для увеличения срока службы применяют полупроводниковые приборы, которые позволяют уменьшить ток, разрываемый контактами, регулятора, (рис. 5-14). Для получения более высокой точности стабилизации скорости (с погрешностью не выше 0,5 %) применяют системы регулирования, в которых в качестве датчика скорости используется тахогенератор того или иного типа. Но эти вопросы выходят за рамки нашего курса. Применительно к бесконтактным двигателям постоянного тока они рассмотрены в гл. 6. 5-6. Универсальный коллекторный двигатель Универсальным коллекторным двигателем называется коллекторный двигатель последовательного возбуждения, работающий как от сети постоянного тока, так и от сети переменного тока при одинаковой угловой скорости в режиме номинальной нагрузки. Принципиальная схема двигателя приведена на рис. 5-15. При работе от сети переменного тока того же напряжения, что и постоянного тока, обмотка возбуждения должна иметь меньшее число витков, поэтому для включения двигателя в сеть переменного тока используется только часть обмотки возбуждения. По своему устройству универсальный коллекторный двигатель аналогичен двигателю постоянного тока с последовательным возбуждением. Для уменьшения потерь на вихревые токи при работе от сети переменного тока магнитная система универсального коллекторного двигателя выполняется шихтованной из листовой электротехнической стали. На полюсах двигателя размещаются две обмотки возбуждения: одна предназначена для работы от сети переменного тока. Другая включается последовательно с первой при работе двигателя от сети постоянного тока. . Рассмотрим более подробно работу двигателя при питании переменным напряжением. Потребляемый из сети ток 1 создает в двигателе два пульсирующих магнитных потока: - продольный магнитный поток полюсов и Ф, - поперечный магнитный поток якоря. Под действием этих потоков индуцируются: трансформаторная ЭДС в обмотке возбуждения £,= -/-ад; Трансформаторная ЭДС в цепи якоря тр - / где Wa = NJiia) - число витков одной параллельной ветви обмотки; ko6 = 2/я - обмоточный коэффициент однофазного якоря; ЭДС вращения в цепи якоря £,Bp = C(0pOd/l/2-Приложенное к зажимам электродвигателя напряжение должно уравновешивать ЭДС Ё/, Ё^гр и Ёдвр, а также падения напряжения на активных сопротивлениях якоря и обмотки возбуждения /а {Га + ff) И на индуктивных сопротивлбниях рассеяния этих обмоток / (Xas + Xfs) I а- Уравненис ЭДС для вращающегося двигателя примет вид U=-Ef-Eg гр - Ёд BP + К {Га + rf) + j {Xas + X,s) L- Рис. 5-15. Электрическая схема универсального коллекторного двигателя Этому уравнению соответствует векторная диаграмма напряжений, приведенная на рис. 5-16. Из векторной Диаграммы следует, что коэффициент мощности универсального двигателя тем выше, чем меньше трансформаторные ЭДС Ef и Ё^р в обмотках возбуждения и якоря, а также падение напряжения на индуктивных сопротивлениях рассеяния и чем больше скорость якоря. Если пренебречь небольшим углом потерь е между током / и магнитным потоком возбуждения Ф^, то выражение для тока двигателя можно записать в виде f cos ф - Eg BP la--;- Га + r Угловая скорость якоря (ротора) /2 £ СФа среднее значение момента т J=-lV2Ia COS а1Фа COS Ш1 = . При работе двигателя от сети постоянного тока ЭДС вращения якоря должна быть EqfVi Eg . СФй СФ i (v *rf) -Jm. 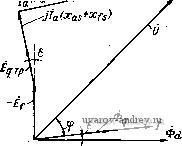 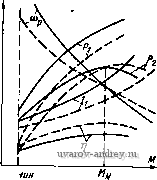 Рис. 5-16. Векторная диаграмма иа-прижений Рис. 5-17. Рабочие характеристики универсального коллекторного двигатели Это означает, что при работе от сети постоянного тока на полюсах должна быть дополнительная обмотка возбуждения. Рабочие характеристики универсального коллекторного двигателя представляют собой зависимости потребляемых тока и мощности, полезной мощности на валу, угловой скороюти и КПД от момента на валу двигателя при U = const. На рис. 5-17 приведен примерный вид этих зависимостей при питании двигателя переменным током (сплошные линии) и постоянным током (штриховые линии). Главв шествя БЕСКОНТАКТНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА 6-1. Принцип работы Двигатели этого типа получили широкое распространение главным образом за последние десятилетия благодаря успехам полупроводниковой техники. Щеточно-коллекторный узел обычного и двигателя постоянного тока удалось заменить флее надежной полупроводниковой схемой, управляемой сигналами бесконтактного датчика положения ротора. В отличие от коллекторного двигателя постоянного тока бесконтактный двигатель имеет обмотку якоря на статоре, а систему возбуждения (полюсы) на роторе. Электронный коммутатор (/С), изменяющий направление тока в секциях, выполняется обычно в виде отдельного блока, соединенного проводниками с обмоткой статора двигателя Д и датчиком положения ротора (Д/7) (рис. 6-1). По своей конструкции бесконтактный двигатель постоянного тока напоминает синхронный двигатель, ток в фазах которого изменяется в зависимости от положения ротора. Вследствие этого имеются два подхода к рассмотрению электромагнитных процессов в бесконтактном двигателе. При первом дви- * к Рис. 6-1. Структурная контактного двигателя тока схема беспостоянного т 
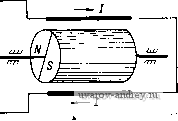 Рис. 6-2. Принципиальная схема односекционного бесконтактного двигателя постоянного тока гатель рассматривается как машина постоянного тока, в которой коммутатор поддерживает направление НС обмотки, перпендикулярное оси магнитного потока возбуждения. При втором подходе двигатель считается синхронным с переменной частотой питающего напряжения, зависящей от угловой скорости ротора. В настоящей главе принята первая точка зрения как наиболее полно отражающая сущность физических явлений в двигателе. Для уяснения принципа работы двигателя обратимся к рис. 6-2, на котором схематически показаны: ротор - постоянный магнит; обмотка статора в виде одного витка; датчик углового положения, состоящий из чувствительных элементов / и 2 и якоря; электронный коммутатор, выполненный в виде моста из четырех транзисторов {VT1, VT1, УТ2, VT2). В положении ротора, указанном на рисунке, якорь ДП взаимо. действует с чувствительным элементом /, триоды VT1 и VT2 от крыты, а VT2, УТГ закрыты. Ток / в витке имеет направление, указанное стрелкой. В результате взаимодействия этого тока с полем постоянного магнита к ротору прикладывается момент, направленный против часовой стрелки (если смотреть со стороны датчика положения). Под действием этого момента ротор двигателя вращается в том же направлении. Когда ротор примет положение, при котором ось полюсов станет перпендикулярна плоскости витка, момент окажется равен нулю и при дальнейшем вращении ротора будет его тормозить, если направление тока витка останется неизменным. Однако этого не происходит, поскольку в указанном положении ротора якорь ДП взаимодействует уже с чувствительным элементом 2, вследствие чего триоды VT1, VT2 закрываются, а VT2 и VT1 открываются. Ток в витке получает обратное направление, и вращающий момент, приложенный к ротору двигателя, сохраняет свое направление. При повороте ротора на 180° картина повторяется. Переключение тока в витке на обратное направление коммутация) происходит в положении ротора, при котором ЭДС в витке 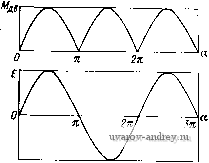 Рие. 6-3. Зависимость момента и ЭДС от угла поворота ротора односекцион-ного двигателя 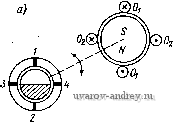 - т' vTf - -т' т' - Oi о, VTf VT2}~ - пз т - Рис. 6-4. Схема двухсекционного бесконтактного двигателя постоянного тока: а - двигатель; б -электронный коммутатор И момент равны нулю. На рис. 6-3 приведены кривые изменения ЭДС и момента в функции угла поворота ротора а в предположении, что индукция постоянного магнита имеет синусоидальное распределение по окружности ротора. Очевидный недостаток двигателя с одним витком (впрочем, как и обычного двигателя постоянного тока с одной секцией и двумя коллекторными пластинами) состоит в том, что момент двигателя имеет явно Пульсирующий характер, а во время переключения 16ка становится равным нулю. Для устранения этого недостатка необходимо увеличивать число секций (витков) обмотки. При этом чем больше будет витков, тем меньше можно получить пульсации момента. Однако значительное увеличение числа секций приведет к росту числа коммутирующих полупроводниковых элементов и усложнению датчика положения ротора. Поэтому на практике ограничиваются двумя, тремя или четырьмя секциями. На рис. 6-4, а показана схема двухсекционного двигателя. Датчик положения двигателя содержит уже две пары чувствительных элементов 1-2 и 3-4, каждая из которых управ- ляет коммутацией секций О, и О, соответственно. Секции обмотки 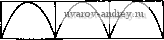 а   Рис. 6-5. Зависимость момента от угла поворота ротора двухсекционного двигателя Oi И О2 подключены к диагоналям транзисторных мостов, как показано на рис. 6-4, б. Последовательность переключения направления тока в каждой секции аналогична изложенной выше при рассмотрении односекционного двигателя. Пространственный сдвиг секций на 90° полностью исключает мертвое положение ротора, поскольку при нулевом моменте, развиваемом одной секцией, в другой секции в этом положении ротора момент максимален. На рис. 6-5 изображены угловые характеристики моментов и Ма, создаваемых секциями 0 и 0, и суммарный момент двигателя Мдв = Ml -f М2. Из графиков можно видеть, что наличие двух секций заметно выравнивает пульсации суммарного момента двигателя. С целью упрощения схемы коммутатора двухсекционного двигателя, содержащей восемь силовых транзисторов, каждую из секций двигателя можно расщепить на две секции, а среднюю точку вывести на зажим источника питания, как это показано на рис. 6-6. Схема такого четырехсекционного двигателя будет содержать только четыре силовых транзистора. Секции 0\ и Oi, а также 0 и О2 сдвинуты по отношению друг к другу на 180° и таким образом взамен реверсирования, тока в секции 0 или 0 двухсекционного двигателя (рис. 6-4) производится поочередное включение секций О'ги 0\ и соответственно О2 и О2 у четырехсекционного двигателя. Упрощение схемы коммутатора (рис. 6-6) привело к появлению в схеме пассивных (не работающих часть времени) секций. Получили распространение схемы трехсекционных двигателей. Две из них с соединением секций в звезду приведены на рис. 6-7 и 6-8. Схема на рис. 6-7 представляет собой вариант нереверсив- ного (однополуперйодного) питания секций двигателя. Ток в каждой секции может протекать по ней только в одном направлении. Схема обмотки имеет вывод средней точки, а коммутатор содержит три силовых транзистора. Датчик положения ротора ЦП состоит из трех чувствительных элементов 1, 2, 3, ориентированных отно- 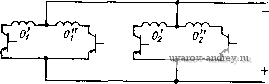 Рис. 6-6. Схема коммутатора четырехсекцйон-ного бесконтактного двигателя постоянного тока еительно обмотки, как в односекционном двигателе, т. е. чувствительные элементы лежат в плоскостях эквивалентных витков, заменяющих соответствующие секции, а якорь представляет собой  w-m- VT3 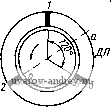  Рис. 6-7. Нереверсивный трехсекционный двигатель с соединением секций в звезду сектор, ось симметрии которого совпадает с осью полюсов магнита ротора. Угловой размер сектора обычно принимается равным 120°. Нумерация чувствительных элементов датчика на рисунке совпадает с нумерацией управляемых ими транзисторов коммутатора. Моменты All, Мг, -Л^з, развиваемые секциями 1,2, 3, и суммарный момент двигателя Мдв в зависимости от угла поворота ротора а представлены на том же рис. 6-7. При повороте ротора в направлении стрелки возбуждается чувствительный элемент 1, а сигнал с элемента 3 исчезает. Сигнал с элемента 1 отпирает транзистор VTl, в результате чего секция 1 запитывается током и создает электромагнитный момент М^. Секция 1 подключена к источнику питания на интервале 120°, совпадающем с угловым размером сектора ДП. После поворота на 120° происходит отключение секции 1 и подключение секции 2, поскольку чувствительный элемент 2 входит во взаимодействие со следующим сектором ДП и оказы- 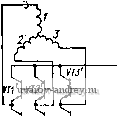 vTi-m-VT3- Н г* г  Q О CL п П Q d D Q Q С 2Х Рис. 6-8. Реверсивный трехсекционный двигатель с соединением секций в звезду вается в возбужденном состоянии. Работа рассматриваемого трех-секционного двигателя состоит в последовательном подключении его секций к источнику питания, что обеспечивается благодаря воздействию на коммутатор сигнала обратной связи, снимаемого с ДП. На рис. 6-8 представлена схема трехсекционного двигателя с реверсивным питанием секций. Благодаря мостовой схеме коммутатора, содержащего шесть силовых транзисторов, ток в каждой секции может менять направление, что обеспечивает лучшее использование обмотки и всего объема двигателя. Датчик положения ротора имеет шесть чувствительных элементов, каждый из которых управляет соответствующим транзистором коммутатора. При этом чувствительные элементы 1, 2, 3, расположенные как и в предыдущей схеме, управляют нижними транзисторами коммутатора VT1, VT2, VT3, а чувствительные элементы Г, 2, 3, комплект которых смещен по отношению к комплекту У, 2, 3 на 180°, управляют транзисторами VT1, VT2, VT3. Таким образом, если возбуждение одного из чувствительных элементов приводит к протеканию тока no соответствующей севдий в одном Направлении, то возбуждение чувствительного элемента, сдвинутого на 180°, изменяет направление тока в этой секции йа противоположное. Поскольку сдвиг между соседними чувствительными элементами составляет 60°, а угловой размер сектора якоря датчика положения равен 120°, то в возбужденном состоянии практически всегда находятся два чувствительных элемента и открытыми - два транзистора. К источнику всегда оказываются подключенными две секции двигателя. В положении, показанном на рис. 6-8, возбуждены элементы 1 и 2. Открытыми оказываются транзисторы VT1 и VT2, а ток от источника проходит по секциям У и 2. Послеповорота ротора на 60° будут возбуждены элементы 3 и J, секция 2 будет отключена, а цепь тока будет образована секциями У и 5. Диаграммы моментов, создаваемых парами секций У-2, J~3, 2-3, и диаграмма суммарного момента также представлены на рис. 6-8. - Трехсекционный двигатель с реверсивным питанием имеет преимущество перед аналогичным двигателем с нереверсивным питанием, обусловленное лучшим использованием меди обмотки и объема активных частей, а также, как правило, более высоким КПД- Однако более сложная схема коммутатора и датчика положения такого двигателя заставляет отдавать ей предпочтение в тех случаях, когда к двигателю предъявляются жесткие требования по габаритным размерам, массе, пульсациям момента и КПД. Заметим, что трехсекционные схемы с реверсивным питанием можно выполнить на том же коммутаторе и датчике положения при соединении секций в треугольник (замкнутая обмотка). Особенность такой схемы будет состоять в изменении угла установки обоймы чувствительных элементов датчика по отношению к магнитным осям секций двигателя. Если в схеме соединения звездой чувствительные элементы 1, 2, 3 установлены по нормалям к магнитным осям секций, то при соединении секций в треугольник комплект чувствительных элементов должен быть смещен на 30° по отношению к этому положению. По энергетическим показателям и использованию объема двигателя характеристики схем с реверсивным питанием при соединении секций в звезду и треугольник практически равноценны. 6-2. Классификация и конструктивное выполнение Прежде чем рассмотреть некоторые реальные конструкции дви^ гателей, остановимся на особенностях их классификации (рис. 6-9). По способу возбуждения, определяющему конструкцию ротора, бесконтактные двигатели постоянного тока могут выполняться: а) с постоянными магнитами на роторе; б) с явнополюсным реактивным ротором (без возбуждения); в) с электромагнитным возбуждением. По типу коммутатора и способу питания силовой обмотки статора бесконтактные двигатели разделяются на: а) двигатели с реверсивным питанием секций (двухполу пер йодный коммутатор, см. рис. 6-4, б); б) двигатели с нереверсивным питанием Секций (одно-полупериодный коммутатор, см. рис. 6-6). По типу обмотки двигатели можно разДелить следующим образом: а) с замкнутой обмоткой по типу якорной обмотки машин постоянного тока с числом секций не менее трех; б) с разомкнутой обмоткой без вывода средней точки по типу многолучевой звезды или последовательно соединенных, сдвинутых на соответствующий угол секций, каждая из которых включена в диагональ мостового коммутатора; в) с разомкнутой обмоткой с выводом средней точки. По типу а строятся схемы с реверсивным питанием, по типу Бесконтактные двигатели постоянного тока С постоянными магнитами С реактивным ротором С электромагнитным возбуждением Реверсивное питание секций Нереверсивное питание секций
Рис. 6-9. Классификация бесконтактных двигателей постоянного тока В - с нереверсивным и по типу б - с реверсивным и нереверсивным питанием. Данная классификация отражает основные особенности схем бесконтактных двигателей, хотя и не затрагивает типа коммутатора и датчика положения, которые являются самостоятельными элементами и должны классифицироваться отдельно. В настоящее время наибольшее распространение в диапазоне малых мощностей получили бесконтактные двигатели с постоянными магнитами и транзисторным коммутатором как обладающие наибольшей. простотой и надежностью при высоких энергетических показателях. Полупроводниковый коммутатор может быть выполнен либо в виде отдельного блока, соединенного жгутом с силовой обмоткой и с датчиком положения, либо в виде блока, встраиваемого в корпус двигателя. То или иное конструктивное решение диктуется назначением двигателя, условиями эксплуатации, габаритными ограничениями и экономическими факторами. На рис. 6-10 представлена конструкция двигателя БДС-0,2, предназначенного для привода лентопротяжных механизмов кассетных магнитофонов. Ротор двигателя состоит из постоянного магнита возбуждения 4 и магнита якоря датчика положения 8, которые спрессованы пластмассой совместно с валом 1. Пакет статора 3 набирается из листов электротехнической стали; в пазы пакета машинным способом укладьшается силовая и тахогеиератор-ная обмотки. В обойме датчика положения закреплены трансформаторы 6, выполненные на ферритовых кольцах; намотка трансформаторов датчика производится на станке. Статор двигателя кре- 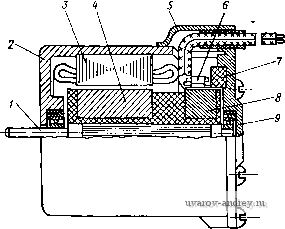 Рис. 6-10. Конструкция двигателя БДС-0,2 / - вал; 2 - корпус; 3 - статор; 4 - постоянный магнит ротора; 5 - крышка; 6 -трансформаторы ДП; 7 - обойма ДП; 8 - постоянный магнит ДП; 9 - щит пится в корпусе 2 клеем, а обойма датчика 7 - на щите 9 винтами. Провода от обмоток статора и датчика положения выводятся через отверстие в корпусе и прижимаются к нему крышкой 5. В двигателе используются подшипники качения. Для снижения механического шума подшипники расположены в спрессованных резиной втулках. Коммутатор выполнен печатным монтажом на гетинаксовой плате и соединяется с двигателем жгутом. Для управления электродвигателем часто используется сигнал, пропорциональный его скорости. Так, в рассмотренной конструкции двигателя БДС-0,2 в качестве такого сигнала используется напряжение обмотки, размещенной на статоре совместно с силовой обмоткой двигателя. Однако качество такого сигнала не всегда удовлетворяет требованиям регулирования, поэтому применяются более сложные схемы, в частности в корпус двигателя встраивается отдельный бесконтактный тахогенератор. 6-3. Электродвижущие силы, токи и моменты двигателя В общем случае мгновенное значение момента, создаваемого некоторой секцией двигателя, обтекаемой током, определяется формулой Mi = P3i/( p = £i/i/< p, (6-1) где Рэ1 - электромагнитная мощность, создаваемая секцией; Е^, - ЭДС вращения и ток секции; юр - угловая скорость. Если индукция в зазоре близка к синусоидальной, то ЭДС вращения секции Может быть записана в виде Е^ = Emi sin а, где а - угол поворота ротора, . . . °. Амплитуда ЭДС Етг = бРФа 1<0р - -4- кобрФЫгСОр. (6-2) Здесь коб = кокукск - обмоточный коэффициент; кр - коэффициент распределения секции по пазам статора; ку - коэффициент укорочения шага; ск - коэффициент скоса пазов; р - число пар полюсов; Ф - магнитный поток на пару полюсов; w, - число витков и число проводников секции. Учитывая, что процессы в двигателе имеют период, равный межкоммутационному интервалу , мы должны рассматривать изменение противо-ЭДС на участке изменения угла поворота ротора в пределах от до -f ак, где угол определяется начальной установкой датчика положения. Так, например, для односекционного двигателя = 0; к = п. Таким образом, принимая во внимание (6-1) и (6-2), можем записать выражение момента и противо-ЭДС вращения для одной секции двигателя в виде £, = COa)pSin(a + ao); Mi = CO/isin(cc + cco), 1 > где С = -- kosNip, О < а < к. Если обмотка двигателя имеет ветвь, состоящую из нескольких секций, одновременно работающих на межкоммутационном интервале, то для определения суммарного момента и противо-ЭДС надо учитывать пространственный сдвиг магнитных осей секций и способ их соединения между собой. Например, для трехсекционной обмотки с соединением секций в звезду при реверсивном питании (см. рис. 6-8) цепь тока состоит из двух последовательно включенных секций, магнитные оси которых смещены относительно друг друга иа угол 2л/3. В этом случае = Ei-E2 = СФюр sin (а + щ) - СФюр sin (а + о-2я/3) = У±- СФюр COS(а + оо- (6-4) 1 ... 4 5 6 7 8 9 10 ... 18 |
||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |