


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 ... 3 4 5 6 7 8 9 ... 18 CHMVM ?nfn Py параметров можно получить условие мак-гос7на Rt пп?п7°°/° двигателя, т. е. момента, приходяще- гося на 1 Вт потребляемой активной мощности, m - Pi+Рг Ы Pl+Pr 2я/ 1 + Pi/Pr Р/(2я/) l + z-i/ReZs где Pj - мощность, рассеиваемая в активном сопротивлении статора; Рг - мощность потерь на гистерезис в роторе. Из формул (4-29), (4-30) и (4-31) следует здесь а = DV(4 р^Дцтб) для ротора с немагнитной втулкой; а = Д/(Цтб) для ротора с магнитной втулкой. Отсюда Re Zs = Re hc6 1 + аеУ a sin 7 (4-32) 1 -f 2a cos Y + a* Удельный пусковой момент имеет наибольшее значение, если Re Zs максимальна. Исследуя выражение (4-32) на максимум как функцию а, получаем а = 1. Это соответствует оптимальным значениям толщины гистерезисного слоя: Допт - D/(ip4 ]im) для ротора с немагнитной втулкой; Допт = 6jim для ротора с магнитной втулкой. Приведенные выше выражения для вектора НС при условии, что а = 1, примут вид: для ротора с немагнитной втулкой; Fm = 6(l+e/v) для ротора с магнитной втулкой. Отсюда следуют два вывода: 1) при оптимальной толщине гистерезисного слоя амплитуда НС, приходящаяся на воздушный зазор и иа активный гистерезисиый слой ротора, одинакова; 2) при заданной максимальной индукции в гистерезисном слое НС меньше у двигателя с немагнитной втулкой, если Цт>0/(2рб), и у двигателя с магнитной втулкой, если [х^ <0/(2рб). Особенности характеристик гистерезисных двигателей. Рассмотренные выше соотношения справедливы для идеального гистерезисного двигателя, имеющего синусоидальное распределение НС по расточке статора и петлю гистерезиса активного материала ротора в виде эллипса. В действительности кривая НС имеет высшие пространственные гармоники, а магнитное поле испытывает зубцовые пульсации. Это приводит к появлению на некоторых скоростях и в синхронном режиме тормозных моментов, обусловленных потерями на так называемые частные циклы (рис. 4-28). Вследствие этого механиче-106 екая характеристика двигателя имеет провал (рис. 4-29). Для уменьшения потерь от высших гармоник целесообразно увеличение в некоторых пределах воздушного зазора двигателя. Характерная особенность гистерезисного двигателя - это низкий коэффициент мощности (cos ф = 0,2-=-0,5). Причина низкого cos ф вытекает из необходимости использовать для магнитопровода ротора материалы с малой магнитной проницаемостью, вследствие чего гистерезисные двигатели имеют большой намагничивающий ток. Большая . составляющая реактивного тока по сравнению с активной приводит к тому, что ток, потребляемый гистерезис-ным двигателем, практически не зависит от нагрузки; это, в частности, позволяет в конденсаторном двигателе получить хорошие пусковые и рабочие моменты при одной и той же фазосдвигающей емкости. Характеристики двигателя зависят от магнитных свойств применяемых материалов, которые, в свою очередь, весьма критичны к режиму термообработки. Это приводит к тому, что на практике наблюдается значительный разброс в свойствах и номинальных данных двигателей. Существенно улучшить характеристики двигателя в синхронном режиме (увеличить КПД и cos ф, снизить потребляемый ток и мощность) можно путем кратковременного перевозбуждения дви- 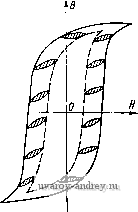 Рис. 4-28. Добавочные потери на частные циклы намагничивания
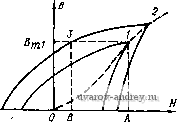 Рис. 4-29. Механическая характеристика реального гистерезисного двигателя Рис. 4-30. Характеристика намагничивания гистерезисного двигателя при перевозбуждении гателя после входа его в синхронизм, например, за счет повышения напряжения питания. При перевозбуждении гистерезисного двигателя получаем синхронный двигатель с лучшим использованием энергии магнитного поля постоянных магнитов. Это явление можно объяснить на основании кривых намагничивания, изображенных на рис. 4-30. Рабочая точка гистерезисного двигателя при номи- нальном напряжении - вершина / петли гистерезиса с максимальной индукцией При повышении напряжения рабочая точка перемещается в вершину новой петли (точка 2), и при дальнейшем снижении напряжения индукция вновь принимает значение Bmi, но по другой нисходящей ветви петли гистерезиса (точка 3). В процессе перевозбуждения НС статора снижается пропорционально отношению отрезка OA к отрезку ОВ, что приводит к снижению потребляемого из сети тока и улучшению рабочих характеристик гистерезисного двигателя. Следует отметить, что эти качества перевозбужденного двигателя при колебаниях нагрузки, выходе из синхронизма, внешних вибрациях утрачиваются и двигатели вновь приходится подвергать перевозбуждению. На практике перевозбуждение применяется только для двигателей относительно большой мощности. Важной особенностью гистерезисных двигателей является по-лисинхронизм, т. е. возможность получения многоскоростных синхронных двигателей за счет выполнения нескольких обмоток статора на разное число пар полюсов. Как уже отмечалось, гистерезисный двигатель легко входит в синхронизм; по существу, условие входа в синхронизм - это Mr>M . Поэтому гистерезисные синхронные двигатели незаменимы при получении синхронного привода с большими маховыми массами (в частности, в гиродвига-телях и центрифугах). Недостатком гистерезисного двигателя является склонность к качаниям в синхронном режиме и в некоторых случаях проскальзывание ротора; это ограничивает применение гистерезисных двигателей в прецизионных приводах, в которых необходима высокая точность поддержания скорости. 4-5. Субсинхронный двигатель Низкие скорости в обычных малогабаритных синхронных двигателях достигаются с помощью присоединения к двигателю понижающего механического редуктора, поскольку электромагнитная редукция скорости за счет значительного увеличения числа пар полюсов практически невозможна. За последние годы благодаря исследованиям советских ученых П. Ю. Каасика, А. С. Куракина и Ф. М. Юферова были разработаны и внедрены в промышленное производство субсинхронные двигатели, в которых электромагнитная редукция скорости осуществляется за счет зубцовых гармоник магнитного поля. Иногда двигатели этого типа называют редуктор-ными или двигателями с электромагнитной редукцией скорости. Принцип электромагнитной редукции скорости за счет зубцовых гармоник поля. Рассмотрим магнитную систему, состоящую из двух коаксиальных магнитопроводящих цилиндров, имеющих равномерно расположенные зубцы (рис. 4-31). Положим, что число зубцов ротора Zp больше числа зубцов статора Zc. Пусть в некоторый момент времени два зубца статора и ротора совпадают (рис. 4-31, а); это положение соответствует максимуму магнитной проводимости! Повернем ротор (рис. 4-31, б) на угол р = 2n/zc - 2n/zp; при этом совпадут два следующих зубца статора и ротора, а это эквивалентно тому, что положение максимальной магнитной проводимости сместилось на угол с = 2n/Zc, который может быть значительно больше угла поворота ротора. Положим, что на статоре имеется обмотка с малым числом пар полюсов, которая может создать поле, вращающееся со скоростью изменения магнитной проводимости, а это означает, что можно получить синхронный двигатель, скорость ротора которого значительно меньше скорости поля.   Рис. 4-31. В поясиеиие принципа электромагнитной редукции скорости Отношение Лред = с/Ор = (Ос/(Ор = Zp/(Zp - Zc) называется коэффициентом электромагнитной редукции и при сравнительно небольших габаритах машины составляет несколько десятков. При Zp>Ze положение максимальной магнитной проводимости перемещается по направлению вращения ротора, а при Zp<Zc -в обратную сторону. Принцип работы. Основные типы субсинхронных двигателей. Принцип работы субсинхронных двигателей и их возможности наиболее просто проследить, пользуясь методом гармонических зубцовых проводимостей, предложенным проф. А. И. Вольдеком для исследования полей в асинхронных машинах. Удельная магнитная проводимость воздушного зазора при двусторонней зубчатости определяется как произведение удельных магнитных проводимостей воздушного зазора при зубчатом статоре и гладком роторе Хс и при гладком статоре и зубчатом роторе Х^; при этом полная проводимость Л = (и</б)ЯЛ. (4-33) где Ho/S - удельная магнитная проводимость равномерного воздушного зазора. Относительную магнитную проводимость статора и ротора Лс и Хр представим каждую в виде ряда Фурье с периодом, равным зубцовому делению: A.= -i-Z(-l)XciCOSZel>; - Е (- 1) Kj cos 2р/ (ф- (Apt), у / -PJ VT (4-34) где k/jc, - коэффициенты воздушного зазора, учитываюш,ие зубчатость статора и ротора; Xcj, Яр/- амплитуды гармоник соответствующих магнитных проводимостей; ф - угол по расточке статора; ыр - угловая скорость ротора. Исследования структуры магнитного поля при двусторонней зубчатости показывают, что при ЬшИг = 0,5 и 6ш/б>20 (где - ширина шлица) наибольшую амплитуду имеет первая гармоника магнитной проводимости, поэтому ею и ограничиваются при анализе субсинхронного двигателя. Формулу (4-33) запишем в виде
1 + *6cclC0S 2сф -f- kpXpi cos 2р(ф - - fflpO + hlKl cos [(Zp -f- Zc) Ф -f -f-ZpfflpO -f- hhXpi cos [(Zp - Zc) Ф - ZpCOp/] j. (4-35) Рис. 4-32. Конструктивная схема субсинхронного двигателя с осевым возбуждением С точки зрения использования принципа электромагнитной редукции скорости представляет интерес только последняя, 4-я составляющая магнитной проводимости 4 = KlKl cos [(Zp-Zc) ф -Zp(Op] , (4-36) которая вращается со скоростью, значительно большей скорости ротора, (p=(OpZp/(Zp -Zc). Рассмотрим магнитное поле в воздушном зазоре двигателя, соответствующее этой гармонике проводимости при, двух способах возбуждения: осевом и радиальном. Осевое возбуждение (рис. 4-32). В этом случае НС обмотки возбуждения постоянна и индукция магнитного поля в воздушном зазоре, соответствующая удельной магнитной проводимости Л4, равна B2 = A4fo = 6ozCO?[(Zp-Zc) ф-Zp(Op/], где Эта составляющая магнитной индукции будет взаимодействовать с НС обмотки статора, если число периодов индукции, уклады- Бающееся на окружности статора, равно числу полюсов обмотки Zp-Zc = р, а угловые скорости одинаковы Р Zp -Zc отсюда (Ор = (o/zp. Коэффициентом редукции скорости субсинхронного двигателя называется отношение угловой скорости поля его рабочей обмотки к синхронной угловой скорости ротора (О р. Для двигателя с осевым возбуждением Кред - (4-37) 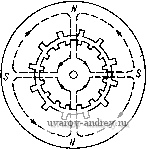 Радиальное возбуждение (рис. 4-33). Пусть НС возбуждения создается многофазной обмоткой, расположенной на статоре (в частном случае она может быть однофазной и питается постоянным током) и имеющей р' пар полюсов: /=со5(р'ф-csV). Индукция магнитного поля, соответствующая удельной проводимости А4, равна в; = KF = ЯсхЯр! cos [(Zp-Zc) ф-2р(0р0 cos (р'ф- (о'0= =.-1-Btecos[(zp-Zc-t-р') Ф- (zp(Op-f- (о>]-f- -J-Btecos [(2p-Zc- Phc. 4-33. Магнитная система субсинхронного двигателя с радиальным возбуждением где - р')ф -(Zp(Op -(о')0, Boz = ЛсхЛр! . Эти две гармоники индукции магнитного поля будут взаимодействовать с НС рабочей обмотки, имеющей число пар полюсов р, если Zp -Zc-f-p = P или Zp-Zc-р' = р. Для получения рабочей обмотки с меньшим числом пар полюсов целесообразно выполнить второе условие Zp-Zc = Р + Р'. (4-38) Это означает, что в качестве рабочего магнитного поля рассматривается поле с индукцией Вг = ЯсЛр1 cos [(Zp - Zc - р') ф - (zp(Ор - о') ]. 4о Выберем оси d и 9 совпадакщими с иаправлеиием соответст-веиио максимальной и минимальной магнитной проводимости. При этом Во-В - = 1--- eil (4-39) здесь В о - максимальная индукция, соответствующая равномерному воздушному зазору. Формулы (4-39) показывают, что по отношению к НС, создаваемой рабочей обмоткой, рассматриваемая гармоника индукции эквивалентна магнитному полю некоторой явнополюсной машины с коэффициентами ka и k , известными из теории синхронных машин. Рабочая обмотка образует магнитное поле, вращающееся с угловой скоростью ф =о)/р; в синхронном режиме Ш' (B-t-(B Р или (Ор = (4-40) гр -2с -р' Рассмотрим частные случаи. 1. Возбуждение постоянным током (& = 0; р ф р'). В этом случае о)р = o)/zp, что совпадает с выражением для частоты ротора при осевом возбуждении. 2. Обмотка возбуждения замкнута на выпрямитель (© = 0; Р = р')- Такой двигатель называется субсинхрониым двигателем с самовозбуждением; для него Zp-Zc = 2р; (Op = (o/zp; /гре„=Zp/p; 3. Рабочая обмотка является одновременно и обмоткой возбуждения (о) =0); р - р'). Такой двигатель называется субсинхронным реактивным двигателем; для него Zp-Zc = 2р; (Op = 2(o/zp; Лре„ = Zp/(2p). 4. Угловая частота сети ю' изменяется от - ф др -\- &>, р Ф р'. Субсинхронный двигатель работает в режиме двойного питания, и его угловая скорость может регулироваться от О до 2u)/zp. При включении в обмотку возбуждения сопротивления или емкости частота индуцируемого в ней тока зависит от скорости ротора двигателя, которая в свою очередь изменяется с нагрузкой. Двигатель работает в асинхронном режиме. Для этого режима работы Zp = Zc-l-p4-p; (Op = (l S,), где Wzp -Шр ш -грШр скольжение. Устройство субсинхронных двигателей. Все перечисленные выше типы субсинхронных двигателей имеют общие конструктивные черты. Пакет статора двигателя набирается из листовой электротехнической стали. Число пазов статора Zt выбирается таким образом, чтобы образовать симметричную многофазную обмотку. Паз зубцовой зоны статора занимает 0,5 зубцового деления. Зубчатый ротор набирается из листов электротехнической стали либо изготавливается из сплошной (})ерромагнитной заготовки с последующим фрезерованием пазов. Число пазов ротора выбирается в соответствии с соотношениями, приведенными в табл. 4-1. Пазы открытые, ширина паза равна ширине зубца. Статор[с обмоткой располагается в корпусе, который в реактивныхрдвигателях и в двигателях с ра- 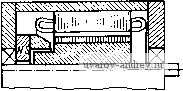 Рис. 4-34. Конструктивнаи схема субсинхронного реактивного двигателя Рис. 4-35. Конструктивная схема субсинхронного двигателя с осевым возбуждением диальным возбуждением изготовлен из алюминиевого сплава, а в двигателях с осевым возбуждением - из стали 10. Для устранения электромагнитной связи между обмотками, имеющими разное число пар полюсой, необходимо р'/р = 2k или р/р' = 2k, где k - целое число. На рис. 4-34 и 4-35 приведены конструктивные схемы субсинхронных двигателей наиболее распространенных типов: реактивного и с осевым возбуждением. Пуск двигателя. Условие входа в синхронизм. Для запуска двигателя на его роторе размещается короткозамкнутая обмотка, сопротивление которой подбирается таким образом, чтобы асинхронный момент Мя от вращающегося магнитного поля рабочей обмотки при (Ор.с =(Ос/ед был меньше максимального синхронного момента Ммакс, но больше момента сопротивления нагрузки Ms (рис. 4-36). Х1ля получения такого асинхронного момента критическое скольжение выбирают достаточным большим, 5к = 7ч-10. Под действием асинхронного момента ротор двигателя раскручивается до скорости, близкой к синхронной, и затем под влиянием синхронного момента входит в синхронизм. В отличие от реактивного двигателя обычной конструкции асинхронный момент субсинхронного двигателя в синхронном режиме не равен нулю, так как по отношению к вращающемуся полю ротор вращается со скольжением S = с -Ц>р (Ос - Мс/Йред J 1 fi)c с fen - ред I которое близко к единице. Двигатель Синхронный С осевым возбуждением с радиальным возбуждением с самовозбуждением реактивный двойного питания Асинхрон- ный с радиальным возбуждением Субсинхронные двигатели Схема соединении и пятаиия обмоток 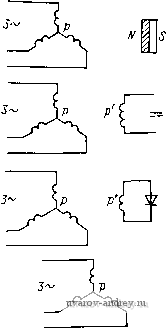 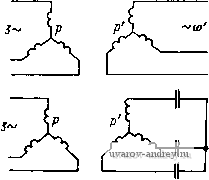 Число зубцов г. гс+Р + гс + 2р гс-f P-f Угловая скорость й)р 2и и -f ш' и (1-%) Примечание. Коэффициент редукции двигателей всех типов, кроме синхронного реактивного, kpep,= 2p/p; для синхронного реактивного двигателя крея = гр/(2р)- Рассмотрим более подробно процесс входа ротора в синхронизм. Уравнение движения ротора при пуске имеет вид Решением этого дифференциального уравнения при нулевом начальном условии (юр = О при / = 0) будет = Jfl JUi expf--A . Р У Мп Я у J(i> ).
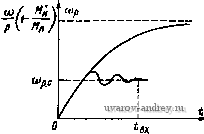 синхронного двигателя в синхронизм Рис. 4-37. Измененне угловой скорости ротора в процессе входа в синхронизм При угловой скорости (Ор.с = -5-= (о/(р^ред) НЭ рОТОр действует синхронный момент Мс =л5с. макс sin УЬредб и ротор продолжает вращаться с этой скоростью, совершая в начальный момент затухающие колебания около положения равновесия, соответствующего синхронной скорости (рис. 4-37). Время от начала пуска до момента затухания колебаний называют временем входа двигателя в синхронизм. Для пуска и синхронизации двигателя без беличьей клетки необходимо, чтобы разница между импульсами синхронного момента и момента нагрузки за время синхронизации была больше изменения кинетического момента ротора Мс. макс - Ми tc> 1 (x>/{pkpep), где Zp<u/{pkpeg). - время синхронизации. 2р^о ред (2Мсмакс -ЯМ ). (4-41) в частности, для двигателей с осевым и радиальным возбуждением J<- (2Мс. макс- яМя); для синхронных реактивных двигателей У<-(2Л1е. зкс-яЛ1 ). Из этих формул следует, что с повышением частоты сети вход в синхронизм требует существенного снижения момента инерции ротора. Уравнения ЭДС и момента субсинхронного двигателя. В общем случае субсинхронный двигатель имеет следующие обмотки: двухфазную или трехфазную симметричную обмотку на статоре, создающую круговое вращающееся магнитное поле; короткозамкнутую (пусковую) обмотку на роторе, которую можно заменить эквивалентной короткозамкнутой двухфазной обмоткой; обмотку возбуждения (или систему постоянных магнитов), сЪздающую осевое или радиальное возбуждение. Как было показано на стр. 111, рабочая гармоника магнитной проводимости воздушного зазора, число периодов которой равно числу пар полюсов рабочей обмотки, перемещается по расточке со скоростью редЮр ПО ОТНОШСНИЮ К СТаТОру И^(А:ред- 1)(0р - по отношению к ротору. Примем систему координат, в которой составляются уравнения ЭДС, вращающуюся с угловой скоростью рабочей гармоники. Обмотки статора и ротора заменим двумя взаимно перпендикулярными обмотками, квазинеподвижными в этой системе координат; это означает, что в обмотках кроме трансформаторных ЭДС надо учитывать ЭДС вращения. Тогда уравнения ЭДС примут вид: для обмоток статора dc = tdc/rfc+ --редйрЧс; ДЛЯ короткозамкнутых обмоток ротора -редЮрЧйс; dt dt -(Vfl-l) p¥,p = 0; + (Vfl-l) p¥,p = 0; ДЛЯ обмотки возбуждения dV dt Здесь Гас = rp = Гс - активное сопротивление обмотки статора; гар = Гдр = г~ приведенное к обмотке статора активное сопротивление беличьей клетки ; г/ - активное сопротивление обмотки возбуждения; idc, iqc idp, iqp - токи в эквивалентных продольных и поперечных контурах статора и ротора; Wac, qc. dp, %р - потокосцепления этих контуров; % - потокосцеплеиие обмотки возбуждения. Выражения для потокосцеплений обмоток запишем в виде de = Ldcde + Mcfif + М ас-pi dp, Wqc = Lqclqe + Mqc-ptqp-, Wdp-=Ma e.pid с + Mp fif -f- Ld pid p, p = M c-pt, e + Lq pig p; VfMfac + Lfif--Mfpidp. Здесь Lde = La ed + Lge, с - co -f L Ma c.p = Ma e-pka; Mq c-p - Ma e-pkg, la e-piqt Ldp - La pkd -f- Lgp, Lg gP - Ea fkq -f- Lgp, La c, La p, Ma c-p - индуктивность И взаимная индуктивность обмоток; kd, kq - коэффициенты реакции якоря по продольной и поперечной осям, определяемые по формулам (4-39). Вектор индукции, определяющий момент двигателя, имеет в качестве составляющих коэффициенты в уравнениях ЭДС при юр (см. § 1-2): Момент двигателя dp Яр kpend с (КеА 1) Р . (kp-l)Wap М = /т5 = (< с , =-. ctd с) + (W- 1) aVd plq р-У, pid р). (4-42) Для машин с числом пар полюсов р это выражение должно быть умножено на р. 4-6. Двигатели с катящимся ротором Принцип работы. Устройство. Электродвигатель с катящимся ротором (ДКР) выполняет функции электродвигателя, редуктора и тормозной муфты. В общем случае ДКР, как и обычные электродвигатели, имеют статор и ротор (рис. 4-38). Статор ДКР снабжен обмоткой, ротор ее не имеет. Характерная особенность ДКР состоит в том, что ротор занимает по отношению к статору эксцентричное положение и может свободно обкатываться по статору, не будучи ограниченным в этом движении подшипниками. Принцип действия ДКР основан на одностороннем притяжении ротора к статору под действием электромагнитных сил, создаваемых токами в обмотках статора. Допустим, что магнитное поле в зазоре между статором и ротором несимметрично и имеет максимум, который в некоторый момент времени совпадает с точкой А на статоре (рис. 4-38, а). В этом случае под действием силы магнитного притяжения ротор притягивается к точке А статора. При повороте маг- нитного ПОЛЯ на угол Р сила магнитного притяжения повернется также на угол р (рис. 4-38, б). Эту силу можно разложить на две составляющие: нормальную Qn и тангенциальную Q<. Под действием тангенциальной силы Qt ротор будет обкатываться по внутренней поверхности статора синхронно с полем. Также синхронно с полем по малой окружности с центром Ос будет перемещаться и центр ротора Ор. При этом ротор будет вращаться вокруг своей оси в обратном направлении с угловой скоростью Юр, которая значительно меньще угловой скорости поля. Действительно, при повороте магнитного поля на угол 2я радиан точка А на поверхности ротора, которая в начальный момент совпадала с точкой касания на статоре, не дойдет до своего прежнего положения на расстояние nDc-nDp (рис. 4-39). Это означает, что ротор повернется в обратную сторону на угол, равный разности длин окружностей статора и ротора, деленной на раднус ротора: Аа яДс-яРр Dp/2 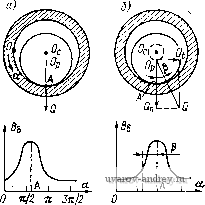 Dc - Do или %/2 % 5lt/2 Рис. 4-38. К образованию вращающего момента в двигателе с катящимся ротором (4-43) Поскольку Dc-Dp -С Dp, то скорость ротора Д КР может быть сделана весьма малой, несколько оборотов в минуту. Несимметричное вращающееся магнитное поле, необходимое для работы ДКР, обычно получают путем наложения униполярного магнитного поля на круговое вращающееся поле двухполюсной мащины (рис. 4-40). В реальных конструкциях ДКР пакет стали ротора не соприкасается с пакетом стали статора. При вращении ротора осуществляется обкатывание специального катка ротора по неподвижному кольцу на корпусе двигателя. При определении угловой скорости ротора в формулу (4-43) надо подставлять диаметры катка ротора и внещнего кольца. На рис. 4-41 показано устройство ДКР с вращающимся полем и униполярным подмагничиванием. Двигатель состоит из стального корпуса 6, в который запрессованы: пакет статора 8 с трехфазной обмоткой 7, кольцевые магнитопроводы статора / для замыкания униполярного потока и катки статора 5. Между обмоткой статора и кольцевыми магнитопрбвЬдами помещена обмотка постоянного тока 9. На валу ротора 3 расположены пакеты ротора 10 и катки ротора 4. Поскольку ось ротора двигателя совершает дви- жение по окружности вокруг центра статора, то передача вращающего момента к нагрузке должна осуществляться с помощью специальной механической передачи, выполненной по типу передачи Альстома или Кардана. 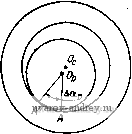
Рис. 4-39. К определению скорости ротора Рис. 4-40. Магнитное поле в воздушном зазоре ДКР с униполярным подмагничиванием Вращающую силу в ДКР можно получить путем создания в статоре трехфазных зон, сдвинутых в пространстве на 120° (рис. 4-42). В каждой из зон образуется пульсирующее магнитное поле; обмотки 6 7 8 1 5 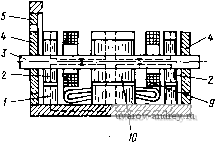 Рис. 4-41. Конструктивная схема ДКР с вращающимся полем и униполярным подмагничиванием 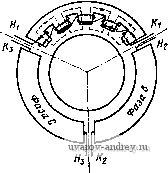 Рис. 4-42. ДКР с пульсирующим магнитным полем / кольцевые магнитопроводы статора; 2 - кольцевые магнитопроводы ротора; 3 - вал ротора; 4 - катки ротора; 5 - катки статора: б - корпус; 7 - трехфазная обмотка; 3 - пакет статора; 9 - обмотка постоянного тока; 10 - пакет ротора фазных зон соединены в звезду и питаются от трехфазной сети переменного тока. Если пренебречь падением напряжения на собственных сопротивлениях обмоток, то максимальная магнитная индукция в зазорах каждой из зон не будет зависеть от положения ротора и окажется одинаковой. Выражения для индукции магнитного поля по оси фазных зон имеют вид: BA = B COS(i>t] Вв BmCOS(i>t+ Be = Вт COS at--.   Рис. 4-43. Пространственная векторная диаграмма сил одностороннего притяжения Рис. 4-44. Силы в ДКР Силы одностороннего притяжения, приложенные к ротору, пропорциональны квадрату индукции и относительно друг друга сдвинуты в пространстве на 120° (рис. 4-43): Яа = Qm COS* at = (1 + COS 2(о0; qB = QmCos(at+ А я) = -[14-cos (2(0-Ь )] Яс = Qm COS* ((0- -- л) = 1 1 + cos (2Ы + -- л . где Qm В]п-- максимальная сила, создаваемая одной фазой. Силы q, Яв, Яс содержат каждая по две составляющие: постоянную и переменную; переменные составляющие пульсируют с угловой частотой 2со и сдвинуты по фазе на 120°. При сложении этих сил с учетом их пространственного сдвига сумма постоянных составляющих равна нулю, а переменные составляющие образуют результирующий вектор силы q, который имеет амплитуду % Qm и вращается по расточке статора с частотой 2(в = 4л/. 1ри симметричном расположении ротора относительно статора эти силы не образуют вращающего момента; при эксцентричном расположении статора и ротора образуется вращающий момент, если точка касания статора и ротора не лежит на линии действия результирующей силы. ДКР, работающие по такому принципу, предложил проф. В. П. Наний [6]. Они называются ДКР с пульсирующим полем в отличие от ДКР с вращающимся полем, рассмотренными выше. Угловая скорость вектора результирующей силы в ДКР с пульсирующим полем в два раза выше, чем в ДКР с вращающимся полем. В конструктивном отношении эти двигатели проще, так как не имеют обмотки униполярного подмагничивания. Момент ДКР. В ДКР различают два момента: электромагнитный, действующий относительно оси статора, = eQ sin в и механический (момент на валу), действующий относительно оси ротора, M = /?pT = -Q (рис. 4-44). Очевидно, что 2е Знак минус означает, что в ДКР с внутренним ротором моменты Мз и Мм имеют противоположное направление. Выражение для Мм зависит от типа двигателя, способа питания и электромагнитных нагрузок. Для рассмотренных в этом параграфе двух типов ДКР оно имеет вид: для двигателя с униполярным намагничиванием [6] Мм= PД f== / (е) sin Р; для двигателя с пульсирующим полем Мм = 2ЙмЙг Bf(8)sinp. Здесь / (е) = 1/ ]/ 1-е,-1; F, / о - амплитуды НС вращающегося поля и НС униполярного намагничивания; В^ - индукция магнитного поля в воздушном зазоре; кг - отношение ширины зубца к зубцовому делению; 4 - активная длина статора; Dc - диаметр расточки статора; б -средний воздушный зазор; йм = (2-6)Х X 10~ - коэффициент, зависящий от типа ДКР и числа зубцов. Преимущества й недостатки ДКР. Основное достоинство ДКР - это возможность его использования в безредукторном электроприводе. Принципиально малоинерционный ДКР можно выполнить на значительную мощность (до нескольких сотен ватт). Важным положительным свойством ДКР является его способность к самоторможению при останове. ДКР не имеет подшипников, поэтому применение ДКР перспективно, когда по условиям смазки обычные подшипники неприменимы. Основными недостатками ДКР являются: быстрый износ катков вследствие проскальзывания поверхностей соприкосновения; надобность в специальных муфтах для передачи вращающего момента на привод; значительные вибрации ротора, вызывающие шум при работе двигателя. 4-7. Волновой электродвигатель Волновой электродвигатель (ВД) осуществляет волновую передачу, в которой генератором механических волн является статор 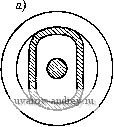 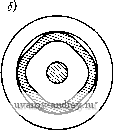 Рис. 4-45. Схемы двигателей с гибкими волновыми роторами: а - с двумя точками каса нии; б - с четырьмя точками касании С многофазной обмоткой, образующей вращающееся или пульсирующее магнитное поле. Особенность двигателя состоит в том, что его ротор, выполненный в виде стакана из ферромагнитного сплава, может деформироваться под действием сил магнитного тяжения. Рассмотрим статор с многофазной обмоткой, образующей в его расточке двухполюсное вращающееся магнитное поле. Разместим в расточке тонкостенный (гибкий) стальной полый ротор (рис. 4-45) Под действием сил магнитного тяжения в местах, соответствующих максимуму индукции, ротор, деформируясь, притягивается к статору. Волна деформации ротора будет перемещаться синхронно с магнитным полем, при этом ротор обкатывается по статору, касаясь его в двух точках. Так же как и в ДКР, за один оборот поля ротор повернется в противоположную сторону на угол, равный разности длин окружностей статора и ротора, деленной на радиус ротора. Угловая скорость ротора определяется по формуле (4-43). В отличие от ДКР волновой двигатель может работать не только в двухполюсном (рис. 4-45, а), но и в многополюсном поле (рис. 4-45, б). По сравнению с ДКР ВД имеет определенные преимущества: центры 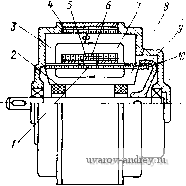 Рис. 4-46. Синхронный волновой электродвигатель /, 10 - зубчатые венцы гибкого стакана; 2 - центрующее эластичное кольцо; 3 - сердечник статора; 4 - обмотка статора; 5 - обмотка возбуждения; 6 - жесткий зубчатый венец; 7 - тонкостенный гибкий стакан; 8 - сектор-маги нтопровод; 9 - жесткий зубчатый венец Вращения ротора и вращающегося магнитного поля совпадают, вследствие этого отсутствуют неуравновешенные центробежные силы, что обеспечивает работу двигателя без вибраций и шума; быстродействие вследствие меньшего момента инерции ротора. Изображенная на рис. 4-45 магнитная система ВД не является эффективной, так как магнитный поток должен замыкаться по тонкостенному ротору. Поэтому на практике ВД имеют другое конструктивное исполнение. Одна из возможных схем ВД приведена на рис. 4-46. На П-образных стержнях статора расположены катушки фазной обмотки 4, создающей вращающееся магнитное поле. К статору крепится зубчатый венец 6 с числом зубцов Zj. Ротор выполнен в виде цилиндрического тонкостенного стакана 7 и может деформироваться в радиальном направлении. На стакане сделаны зубчатые венцы /, а внутри стакана в виде секторов - магнитопроводы 8; секторы могут перемещаться относительно друг друга в пределах максимальной деформации стакана. Электромагнитная сила, действующая на поверхность гибкого ротора, пропорциональна квадрату индукции. Число волн деформации стакана и равно числу полюсов, О = 2р. Эти волны деформации перемещаются со скоростью поля (Ос, при этом венсад 1 на де(}юрмиро-ванном участке находится в зацеплении с жестким зубчатым венцом 6. Происходит обкатывание тонкостенного ротора по этому венцу статора. Поскольку число зубцов венца Z2<Zi, то ротор будет вращаться с угловой скоростью Юр= Юс.(22-Zi)/Z2. Это вращение ротора через зубчатую передачу 9 а 10 передается на вал двигателя. Волновой электродвигатель обладает всеми достоинствами волновых механических передач и характеризуется большим вращающим моментом, практическим отсутствием выбега и самохода, возможностью работы в шаговом режиме. В отличие от ДКР ротор волнового двигателя сбалансирован, вследствие этого в машине отсутствуют вибрации. Однако необходимость иметь эластичный ротор вызывает значительные конструктивные и технологические трудности в реализации волновых электродвигателей с высокими энергетическими показателями. Для повышения энергетических показателей двигателя используется униполярное возбуждение с помощью кольцевой обмотки постоянного тока 5. В данном случае число волн деформации U = р и обмотка двухволнового двигателя должна быть четырехполюсной. Расчет момента волнового двигателя представляет собой довольно сложную задачу и в настоящей книге не рассматривается. Глава пятая КОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА 5-1. Основные типы. Конструктивные особенности двигателей Электродвигатели постоянного тока мощностью от долей ватта до сотен ватт широко применяются для привода различных механизмов в автономных системах, размещенных на судах, самолетах, автомобилях, орбитальных космических стациях, в роботах, а также в переносных бытовых приборах, игрушках. В зависимости от способа возбуждения различают двигатели с электромагнитным возбуждением и с постоянными магнитами. Двигатели с электромагнитным возбуждением обычно проектируются на относительно большую мощность (несколько десятков ватт и выше). Обмотка возбуждения двигателей выполняется параллельной или последовательной; смешанное возбуждение в малогабаритных машинах не О Рис. 5-1. Схемы включения обмоток возбуждения двигателей постоянного тока; а - параллельная; б - последовательная; в - последовательная реверсивная Применяется. На рис. 5-1 приведены схемы включения обмоток возбуждения двигателей постоянного тока. Конструктивно двигатели имеют закрытое или защищенное исполнение. Магнитная система выполняется, как правило, двухполюсной в виде сплошной стальной станины с объемными цельными или шихтованными полюсами (рис. 5-2, а) или же в виде шихтованной вместе с полюсами станины (рис. 5-2, б). Якорь двигателя представляет собой пакет, набранный из листовой электротехнической стали толщиной 0,35 или 0,5 мм. Пазы якоряимеют скос на одно зубцовое деление для уменьшения пульсаций магнитного потока и устранения реактивных моментов. Обмотка якоря выполняется как простая петлевая или волновая с относительно небольшим числом секций. Коллектор представляет собой узел, получаемый запрессовкой пластин в пластмассовую втулку. Двигатели не имеют дополнительных полюсов и компенсационной обмотки. Щетки для реверса машины устанавливаются на геометрической нейтрали. Поскольку частота вращения двигателей малой мощности относительно велика (4000-10 ООО об/мин), то условия коммутации получаются тяжелыми, поэтому значительное внимание при конструировании должно быть уделено щеточно-коллекторному узлу, который на- а) 1,.. пл 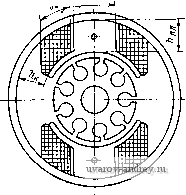 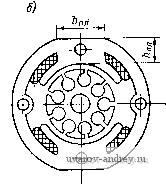 Рис. 5-2. Магнитные системы двигателей постоянного тока: а- с объемными полюсами; б - в виде шихтованной станины *пл пл ~ Р высота полюса; 6 и - ширина и высота катушки 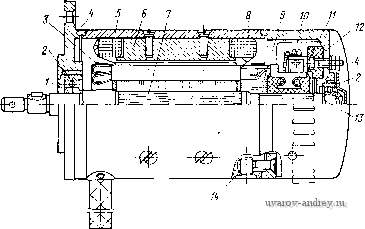  Рис. 5-3. Конструкция электродвигателя постоянного тока мощностью 200 Вт / - крышка подшипника; 2 - шарикоподшипник; 3 - бандаж; 4 - подшипниковый щит; 5 - корпус (ярмо); 6 - полюс; 7 - вал; 8 - обмотка возбуждения; 9 - изоляционное заполнение между лобовой частью обмотки и валом; 10 - коллектор; - армирующее кольцо коллектора; 12 - траверса; 13 - изоляция вала со стороны коллектора; 14 - прилив для крепления подшипниковых щитов 1 ... 3 4 5 6 7 8 9 ... 18 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |