


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 2 3 4 5 6 7 ... 18 Прйбедейное к фазе D;rQ=(l/K) = 3 гф - axtHbHoe coйpotи6ЛeЯйe фазы Q. приведенное к ф1зе D; Qs = (1 С^;.ф. = 3 ;.ф, - индуктивное сопротивление рассеяния фазы Q, приведенное к фазе D. Приведенные сопротивления взаимной индукции ротора и фазы О равны сопротивлениям взаимной индукции ротора и фазы D: XmQ - -Гп = 2г 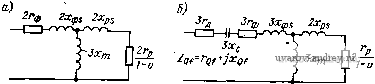 Рис. 3-21. Схемы замещения для токов прямой последовательности: о - фазы D; б - фазы Q Схемы замещения фаз D и Q для токов прямой последовательности изображены на рис. 3-21, Для общности в схеме замещения вспомогательной фазы кроме емкости учтено добавочное активное сопротивление лд. Схемы замещения для токов обратной последовательности получаются путем замены 1-и на 1 -f у. Из полученных схем замещения находим: 2d/ = (2лф -Ь лр Di) -Ь / (2д;ф S -Ь дгр Di)\ ZD6 = (2/-ф-f-Лр оь)-f-/ (2Жф S-f-л:р оь); ZQf = (Згф -Ь Згд -Ь гр Di) Л- i (Зд:ф 5 - Зйсс -Ь АГр £./); Zq6 = (Злф + 3,-д -Ь /-р Ой) -Ь / (За:ф5 - Зл:с -Ь ;Ср дб). (3-27) W /-pDf, л:ро/ и т-роб, д:роб - активные и индуктивные сопротивления цепей разветвления для токов прямой и обратной последовательности. 1оки прямой н обратной последовательности находим по формулам (3-24), полагая К = 1/л/3: ZDfZQb + ZDbZqf (3-28) Для получения условий кругового вращающегося поля приравняем /ftc = 0; тогда из второго уравнения (3-28) найдем ZQf + iVi ZDf=0. Подставляя в это уравнение выражения (3-27) и приравнивая нулю вещественные и мнимые части, получаем Згф-{-3/-д--гро/-Уз (2л:ф5-Ь д:ро/) = 0; Зд:ф5-Зд:с-ЬдгрО/-Ь Кз(2гф--Гро/) = 0. J (3-29) Согласно схеме замещения для токов прямой последовательности фазы D (рис. 3-21, а) имеем 2 Лф -f rDf = rDf\ 2 дгф^ -f xDf = Df- При этом из уравнений (3-29) находим rDf -f Гф XDf+*ф5 (3-30)  Рис. 3-22. Векторная диаграмма токов н напряжений для симметричного режима 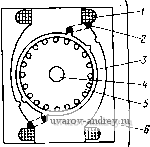 Рис. 3-23. Конструктивная схема двигателя с экранированным полюсом / - обмотка возбуждения; 2 -экранирующий виток; 3 - Шунт; 4- вал; 5- магиитопровод ротора; 6 - магиитопровод статора Очевидно, что эти условия могут быть выполнены только для определенных значений rDf Df зависящих от скорости ротора двигателя. Если двигатель всегда работает под нагрузкой, то емкость и добавочное сопротивление выбирают, исходя из условий получения кругового вращающегося магнитного поля в номинальном режиме, а для обеспечения необходимого пускового момента предусматривают включение добавочной пусковой емкости. При работе двигателя как в режиме холостого хода, так и под нагрузкой емкость выбирают по допустимым потерям в режиме холостого хода и под нагрузкой. Обычно емкость в этом случае находится экспериментально. Удовлетворительная работа двигателя во всех режимах может быть получена, если Гд и хс определить по формулам (3-30) для скольжения, соответствующего мо- менту нагрузки, равному Мр]. Для схемы, изображенной на рис. 3-20, б, круговое поле также может быть получено только при вполне определенном значении cos ф. В случае кругового поля векторная диаграмма напряжений имеет вид, приведенный на рис. 3-22. Фазовый сдвиг между токами и напряжениями в обмотках должен быть равен 60°, так как вектор тока фазы А перпендикулярен вектору напряжения на конденсаторе, что соответствует cos ф = 0,5; напряжение конденсатора равно напряжению сети U. Емкостное сопротивление 1/к и а /З Хг = (а 1а Реактивная мощность конденсатора Это несколько меньше, чем для схемы на рис. 3-20, а. По этой причине схема включения универсального двигателя 3-20, б применяется чаще. Кроме того, при этой схеме двигатель можно выполнять с меньшим числом выводов обмотки статора. 3-8. Двигатель с экранированными полюсами Принципиальная конструктивная схема асинхронного двигателя с экранированными полюсами приведена на рис. 3-23. На полюсах двигателя расположена обмотка возбуждения, часть полюсных наконечников экранируется короткозамкнутыми витками, между полюсами сделаны насыщающиеся магнитные перемычки (шунты). Короткозамкнутые витки создают фазовый сдвиг между магнитными потоками под экранированной и неэкра-нированной частями полюса. Вследствие этого в воздушном зазоре двигателя образуется эллиптическое вращающееся магнитное поле. В результате взаимодействия этого поля с короткозамкнутым ротором возникает вращающий момент. Электромагнитные процессы в этом двигателе при учете насыщения магнитопровода и высших гармоник поля, создаваемых обмотками, имеют весьма сложный характер. Рассмотрим электромагнитные процессы для простейшего случая, когда насыщением стали можно пренебречь, магнитный шунт заменен некоторым сосредоточенным участком с магнитной проводимостью Яш, воздушный зазор равномерный, а обмотка ротора имеет синусоидальное распределение НС. Магнитная система такого двигателя двухполюсного исполнения и расположение обмоток приведены на рис. 3-24. Линия 00, проходящая через выточки на полюсах (места расположения магнитных шунтов), представляет собой физическую нейтраль, отделяющую разноименные полюсы. От этой линии против часовой стрелки будем отсчитывать расстояние х по поверхности статора. Обмотки возбуждения и ко-роткозамкнутая обмотка - сосредоточенные с числами витков о ! 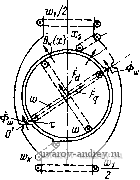 Рис. 3-24. Магнитная система и обмотки в двигателе с экранированными полюсами и Шк; ширина экранированной части полюса равна Хэ (обычно х,<т/2, где т-полюсное деление, а Шк - 1). Обмотка ротора заменена двумя взаимно перпендикулярными, синусоидально распределенными обмотками d и с НС Uwbmx ,. Piqwcos-x, (3-31) где W - эффективное число витков; h, iq - векторы токов. Магнитную индукцию в воздушном зазоре двигателя определяем по формуле B() = a.[F,(x)-fFp(x)]; (3-32) о здесь h (лг) и Рр ix) - намагничивающие силы обмоток статора -и ротора: 1Ш- [1 (X) - 2 1 (Аг-т)] -f /кШк У2\\(х)-\ (Х-Хз) - - 1 (дг-т) Ч- 1 (дг-т-X,)], (3-33) где единичная функция х<0; я uf li sin-x-f/,cos Магнитный поток шунта Фш = 1/ 2 ( /ix -1- /кСУк), (3-34) (3-35) где Яш - магнитная проводимость шунта. Потокосцепления обмоток: VaOd + VWid; WqOqW + VuJKiq- Здесь - магнитный поток обмотки возбуждения; ф^ = Фщ + И В{х)йх - магнитный поток короткозамкнутой обмотки; и Ф, - магнитные потоки пфвых гармоник магнитной индукции в воздушном зазоре, сцепляющиеся с обмотками dug; Я^, Ks, К - магнитные проводимости потоков рассеяния обмоток. Используя приведенные выше выражения для Фш и В (х) получаем = V2W, [(Я + 2К + Н ) ,/,+(2 V + tie f-) wj. + I 4т/ = с to + ( 1 - COS Хз) .4 + -sin-WK+(x.+ ,.o)4 Уравнения ЭДС контуров двигателя имеют вид (3-36) здесь и - О)р/шс - относительная скорость ротора двигателя-r-L, Гк, г - активные сопротивления обмоток. Подставляя в (3-36) выражения для потокосцеплений обмоток и вводя приведенные к обмоткам возбуждения токи и параметры 1к - 1к-; /d = /<i - ПолучйеМ уравнения ЗДС, Kotopbie запишем в МаТричнбМ вйДб Ik d q Zi+i {2x+xn) i{2x-\-x) ]Xm 0 / (2a:-f Vs) Z->rl{x->r2xQk) jx{l-cosnk) jxsinnk im iXm{-cosnk;)+ r+]{x+x\) v{x-x,) -{vxmsmnka - m ix&mnk-vxX -v{x + x,) г+л:;) X (1 - cos пкэ) Здесь
(3-37) Я 0 6 8 Xm = 2nf-Kf!iA\ ks = xjx; Zi = ri+ jxi,; Z = r + Jxks, Xi, = 2nhKiwb xKs==4nfiKM; лг5=2.тт/АйУ1. По общему правилу (см. § 1-2) находим обобщенный вектор индукции 1 d[ xjnsinnks + ix + xs)ig 2я/1 -xJ{l-cosnk,)-xJi-{xm + Xs)id. и момент М = Re (В) =-- Re - / Jd sin якэ+ iJс, X 2я/1 Х(1 -cosnfe)]. (3-38) Решая уравнения (3-37) относительно токов и подставляя в формулу (3-38) результат для заданных параметров двигателя, можно определить зависимость момента от относительной скорости. В частности, можно методом планирования эксперимента найти при данном воздушном зазоре б значения кэ и Яш, при которых двигатель будет иметь желаемую механическую характеристику. Рассмотрим два частных режима работы двигателя с экранированными полюсами: идеальный холостой ход, соответствующий отсутствию обмотки на роторе (г = оо), и режим короткого замыкания (у = 0). Уравнения ЭДС для первого режима работы полу- чим из (3-37), полагая h К ~ 1 к .1 Г Zl + / (дго + 2хш) / (Хо&э + 2хш) к L ЦХокэ + 2Хш) Z + j{2Xok,-\-Xm) (3-39) Этой системе уравнений соответствует схема замещения, изображенная на рис. 3-25. Используя эту схему; нетрудно построить векторную диаграмму токов, ЭДС, магнитных потоков двигателя. Магнитный поток обмотки возбуждения представим в виде Ф1 = 2Фш + Фэ-1-Ф„, 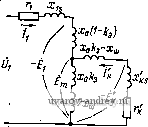 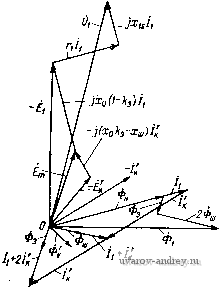 Рис. 3-25. .Схема замещения асинхронного двигателя с экранированными полюсами (режим идеального холостого хода) Рис. 3-26. Векторная диаграмма асинхронного двигатели с экранированными полюсами (в режиме идеального холостого хода) где Фш - У^ЯшШ1(/1--/к)- магнитный поток шунта [см. формулу (3-35)1; Ф. = 11 B{x)dx=y2Kk,w{ii + 2i:) - магнитный поток экранированной части полюса; г Ф„==Ц B{x)dx=Y2Ki\-h) wiii - магнитный поток неэкранированной части полюса. Здесь Ав= ji-- магнитная проводимость воздушного зазора для магнитного потока возбуждения. 72 Построение векторной диаграммы (рис. 3-26) начинаем с векторов Ui и 1\. Вычитая из Ui падения напряжения rj и jXisiu получим вектор протию-ЭДС - i&i и перпендикулярный ему вектор магнитного потока возбуждения Ф^. Вычитая из -Е^ вектор jxo (1-) il, получим вектор = / (ХоэЧ-Зхш) (/i + /к). Строим вектор /i + /к, отстающий по фазе от на 90°, а также векторы и ii + 2il Используя приведенные выше выражения для Фш, Фэ и Фн, строим векторы магнитных потоков. Вычитая из Ет вектор - / {Xok, + хш) /к, находим вектор -К, который перпендикулярен магнитному потоку Фк = Фш + Фэ- Xts Xs*Tm (i-C0S7lkj} 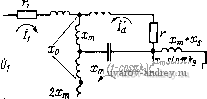 Рис. 3-27. Схема замещения асинхронного двигателя с экранированными полюсами (режим короткого замыкания) Для второго режима работы в уравнениях (3-37) положим о = 0. Уравнения ЭДС примут вид О 1 к d Zi + l(Xo+ 2хш) / (кэХо + 2хш) jXm Цхокэ + 2хш) Z + i(xok+x) /д: (1 - cos nfe,) /х„8шяйэ }Хт . JXm (1 - cos яйэ) г' + j (х^ + х') О О ixmsinnk, О г' + }{хт + х',)
(3-40) Соответствующая этой системе уравнений схема замещения приведена на рис. 3-27. Здесь х' = xis - Хш Л- х^Х [2-cos я- -sin яА;, - (л78) {\ - 2k,)\. Построение векторной диаграммы для этой схемы замещения аналогично описанному, и его рекомендуется выполнить читателю в качестве упражнения. Анализ структуры магнитного поля в воздушном зазоре двигателей с экранированными полюсами показывает, что оно имеет эллиптический характер и содержит 3-ю пространственную гармонику. Это приводит к более низким энергетическим характеристикам этих двигателей по сравнению с конденсаторными (кратность пускового момента MJMn < 0,6; перегрузочная способность MuiKc/Ms = 1,1-ь1,3; КПД Т1 = Юч-ЗО %), а также к провалам в механической характеристике при частоте вращения около 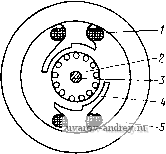 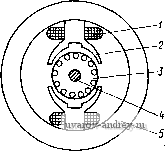 Рис. 3-28. Асинхронный двигатель с асимметричными полюсами I - обмотка возбуждения; 2 - магиитопровод ротора; 3 - вал; 4 - асимметричный полюс; 5 - магиитопровод статора Рис. 3-29. Асинхронный асимметричный двигатель с пазом на полюсе I - обмотка возбуждения; 2-полюс статора; 3 - магиитопровод ротора; 4 - вал; 5 - магиитопровод статора Vs ОТ синхронной. Поэтому двигатели этого типа применяются в изделиях бытовой техники, где указанные показатели их работы менее существенны. Главное достоинство двигателей с экранированными полюсами: простота конструкции, надежность в эксплуатации, низкая стоимость. В этом отношении еще большие преимущества имеет модификация двигателей, в которых роль коротко-замкнутого витка выполняют насыщенные участки полюса. Это двигатели с асимметричным магнитопроводом. На рис. 3-28 приведена его принципиальная конструктивная схема. Полюс двигателя можно условно разбить на два участка: ненасыщенный (большего сечения и с большим воздушным зазором) и насыщенный (малого сечения магнитопровода и с меньшим воздушным зазором). Это позволяет в некоторой степени уравнять магнитные потоки на указанных участках. Степень насыщения выбирается таким образом, чтобы получить наибольший фазовый сдвиг между магнитным потоком и НС. Для большего пространственного сдвига магнитных потоков насыщенного и ненасыщенного участков в некоторых конструкциях двигателей предусматривается специальный неглубокий паз на полюсе (рис. 3-29). По своим характеристикам двигатели с асимметричными полюсами несколько уступают двигателям с экранированными полюсами. Уравнения ЭДС и момента асинхронного двигателя с экраиированиым полюсом легко получить из уравнений обобщенной электрической машины, если учесть, что короткозамкнутая обмотка статора п смещена на угол а по отношению к обмотке возбуждения (рис. 3-30). Пусть К= wjwt - коэффициент трансформации обмоток, при этом матрицы сопротивлений и момента двигателя имеют вид Го + ho jXmKcosa VXmd jXmK COS a (rn + ixdnCosa + -j-jxqnsma) (jXmd cos a - - XmgV sin a) к (jXmq Sin a -f -f Xmdv COS a) К jXmd IXmiK COS a iXmqKsm a r -f jXd XdV - XnV r -f jxc (3-41)   Рис. 3-30. Электрическая схема двигателя, с экранированным полюсом Рис. 3-31. Приведенная к осям d и q электрическая схема двигателя с экранированным полюсом (oG = D О . Xmd - XmqK sin а XmdK COS a 0 -Xn 0 J (3-42) Матрица Z отличается от соответствующей матрицы обобщенной машины (1-13) наличием ЭДС взаимной индукции между обмотками D к п, пропорциональной jXmK cos а, появлением в контурах ротора d к q как трансформаторной ЭДС, так и ЭДС вращения, а также более сложным выражением для индуктивного сопротивления обмотки п, определяемой с учетом формулы (1-4). Матрица момента (oG состоит из коэффициентов при относительной скорости V в матрице Z. Уравнение напряжения двигателя Z[ = U, (3-43) 75 где бекторы токй н Приложенного вайряжевия будут
М = Re{lGi), (3-44) Решение уравнения (3-43) относительно токов в общем виде приводит к громоздким формулам, поэтому расчеты выполняют для конкретных двигателей с помощью ЦВМ. Уравнение напряжения (3-43) н матрицу сопротивлений можно преобразовать к более простому виду, если ввести на статоре токи /<ic н [дс, пропорциональные НС, действующим по осям йи q (рис. 3-31): Idc = iD+inKcosa; iqc = UKsina.
Используя формулы преобразования, приведенные в § 1-4, получаем rD + iXD - (D + №s)ctga - {.Го + ixDs)ctg a гп + jxgn + (гп + + jxns -f / D +ixDs) ctg2 a IXmd XmdO U=Ud - XmqV jXmq - ctga 0 0 iXmd г + jxa, XaP Я IXmq - XgV r + jXq (3-45)
Эти уравнения отличаются от уравнений, обобщенной электрической машины наличием членов, отражающих электромагнитные связи между обмотками статора, а также добавочного члена (г„ + jXns + -f jxds) ctg*a в собственных параметрах обмотки статора по поперечной оси. Расчет по этим уравнениям может оказаться более удобным, так как позволяет использовать стандартную программу для обобщенной электрической машины (см. § 1-6). 3-9. Линейный двигатель Линейными двигателями называются электрические машины, в которых электрическая энергия преобразуется в механическую энергию поступательного движения без механических передач. 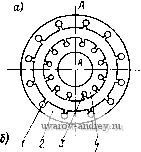 blJLRJLOJLOJULSLJtlULflJLOJL  Рис. 3-32. Асинхронный двигатель вращательного (а) и поступательного (б) движения 1,3 - обмоткн статора н ротора (вторичного элемента); 2,4 - магнитопроводы статора и ротора; а - а - след плоскости разреза двигателя вращательного Движения Рнс. 3-33. Линейные асинхронные машины с различными относительными размерами статора {!) н вторичного элемента (2): а - статор и вторичный элемент одинаковой длины; б - машина с коротким статором; в - с коротким вторичным элементом Такого типа машины малой мощности нашли применение в приводах конвейеров, линейных транспортеров, промышленных роботов, насосов, ткацких станков и других устройств, в которых требуется поступательное или возвратно-поступательное движение. В линейных асинхронных двигателях так' же, как и в обычных асинхронных машинах, для образования тягового усилия используется принцип бегущего электромагнитного поля. По конструктивным признакам и особенностям физических процессов линейные двигатели разделяются на машины с поперечным и с аксиальным магнитным потоком. Двигатель с поперечным магнитным потоком можно представить как разрезанный по образующей и развернутый в плоскость обычный асинхронный двигатель (рис. 3-32). В отличие от мащин вращательного движения перемещающийся элемент двигателя называют бегуном. Для получения постоянного по величине усилия при движении бегуна размеры статора и бегуна выбирают различными (рис. 3-33). Соответственно этому линейные асинхронные ма-щины подразделяются на две группы: мащины с коротким статором и мащины с коротким бегуном. Статор плоских линейных асинхронных двигателей может Рис. 3-34. Линейные асинхронные двигатели с листовым вторичным элементом: а - магнитно-двусторонний двигатель с односторонним статором; б - двигатель с двусторонним статором; в - магнитно-односторонний двигатель / - статор; 2 - вторичный элемент; 3- ферромагнитный сердечник выполняться в трех вариантах: односторонний, двусторонний, магнитно-односторонний (рис. 3-34). Бегуны в этих машинах обычно выполняются в виде листа из меди, алюминия или ферромагнитного 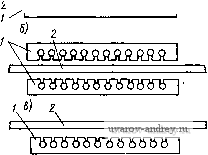 А-А  Рис. 3-35. Трубчатая линейная асинхронная машина с односторонним статором 1,2 - обмотка н сталь статора; 3,4 - ферромагнитный н проводниковый материалы вторичного элемента материала; перспективными являются бегуны, состоящие из омедненных ферромагнитных листов. Простейшим типом линейного асинхронного двигателя с аксиальным магнитным потоком является трубчатый двигатель (рис. 3-35). В этом двигателе обмотка статора состоит из цилиндрических катушек, уложенных в определенной последовательности, а может состоять из двух или трех непрерывных слоев (рис. 3-36). Бегун двигателя представляет собой ферромагнитный стержень, армированный хорошо проводящим материалом. Обмотки . линейных асинхронных двигателей имеют схемы соединений, аналогичные схемам в обычных асинхронных двигателях. В некоторых типах линейных двигателей предусматриваются переменные по длине полюсное деление статора и параметры обмоток бегуна, что позволяет гибко изменять тяговые усилия двигателя и его скорость. Для приближенной оценки характеристик двигателя его рассматривают как обычный двигатель с развернутым статором. Линейная скорость бегущего магнитного поля статора Vc = 2t/i, где т - ~-полюсное деление. Скольжение двигателя определяется по формуле 1= =- 6 1, 2Tfi
Рис. 3-36. Обмотка линейной асинхронной машины в виде непрерывных слоев провода для каждой фазы где Иб - линейная скорость бегуна. большинстве приводов линейный в двигатель - осуществляет возвратно-по- С ступательное движение. Это означает, что двигатель должен иметь хорошие пусковые свойства, т. е. критческое скольжение, близкое к единице] При этом скольжение, соответствующее номинальному режиму, s, = 0,1-4-0,3. Скорость бегуна в номинальном режиме будет U6n = Mi (1-%) (0,7-f-0,9)-2T/i. Одной из особенностей линейного двигателя является наличие краевого эффекта, обусловленного разомкнутой магнитной системой статора; краевой эффект проявляется в том, что в бегуне образуются добавочные потери от пульсирующего поля статора и тормозные силы. Интенсивность эффекта зависит от типа бегуна, схемы обмотки статора и числа пар полюсов. При ориентировочных расчетах для машин с числом пар полюсов р > 3 можно принять, что сила, создаваемая линейным двигателем, на 10-20 % меньше силы, создаваемой аналогичным по параметрам асинхронным двигателем с кольцевым статором. Сила для двигателя с кольцевым статором находится по формуле F = 2M/D=nM/(pT), где М - момент двигателя, который для данного скольжения и типа первичной и вторичной обмоток можно рассчитать по формулам, приведенным в предыдущих параграфах. Для двигателей с бегуном в виде медного или алюминиевого листа расчет характеристик ведется по формулам, описывающим асинхронные управляемые двигатели с полым немагнитным ротором (см. § 10-6). Зависимости, наиболее удобные для расчета магнитного поля в воздушном зазоре линейного асинхронного двигателя, получены А. И. Воль-деком [28]. При отсутствии насыщения в ярме статора магнитная индукция в воздушном зазоре в пределах обмотанной части статора В = В„ fsin(2nht-5. Л ( 1)р sin , (3-46) где Вт = yiQpJ - максимальная индукция бегущего поля; --амплитуда НС статора; Я™ - отношение, яр магнитной проводимости шунтирующих участков магнитной цепи к магнитной проводимости активной зоны воздушного зазора; б' - приведенный воздушный зазор с учетом наличия пазов и насыщения зубцовой зоны; - число фаз обмотки статора; w - число 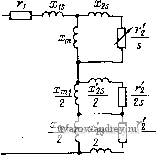 m-s) Рис. 3-37. Схема замещения линейного асинхронного двигателя с длинным бегуном типа беличья клетка> : 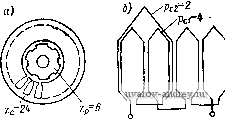 Рис' 3-38. Стальной лист статорного и роторного пакета (а) и принципиальная схема первичной и вторичной обмоток статора (б) витков в фазе обмотки статора; o6i - обмоточный коэффициент. Формула (3-46) показывает, что в простейшем случае при пренебрежении высшими гармониками поля и отсутствии насыщения ярма статора линейный асинхронный двигатель можно рассматривать как совокупность двух асинхронных машин - с бегущим и пульсирующим магнитным полем/ Соответственно этому схему замещения линейного асинхронного Двигателя с длинным бегуном типа беличья клетка представим в виде, изображенном на рис. 3-37./ Здесь Хт - индуктивное сопротивление, соответствующее бегу щему магнитному полю; Xmi - индуктивное сопротивление, соответствующее пульсирующему магнитному полю; r-i, x-s, r2, X2s - активные сопротивления и индуктивные сопротивления рассеяния первичной и вторичной обмоток. С помощью этой схемы можно приближенно выполнить расчет основных характеристик линейного асинхронного двигателя.  3-10. Индукторный асинхронный двигатель Индукторными двигателями называются электрические машины с зубчатым безобмоточным ротором. У этих машин все обмотки (первичные и вторичные) располагаются на статоре, электромагнитная связь между обмотками статора осуществляется за счет изменения магнитной проводимости воздушного зазора при вра-щетии зубчатого ротора. В настоящее время предложено большое число различных модификаций индукторных асинхронных двигателей. Для выяснения принципа работы этих двигателей и физической сущности электромагнитных процессов в них рассмотрим простейший Тип индукторног® асинхронного двигателя с гладким статором и зубчатым ротором (рис. 3-38). В пазах статора рас- ,) полагаются многофазные первич- fV ные и вторичные обмотки с числами пар полюсов Pi и для устранения трансформаторной связи между обмотками по первой гармонике НС числа пар полюсов обмоток выбираются из условий Pi = 2kp2 и Pa = 2Pi, где k - целое число. Найдем индукцию магнитного поля в воздушном зазоре при следующих допущениях (рис. 3-39): 1) НС первичной обмотки статора имеет синусоидальное распределение и может быть выражена формулой 1 =cos (pia-(aO. где а - угол, отсчитываемый по окружности статора; 2) магнитная проводимость воздушного зазора вследствие зубчатости ротора имеет постоянную составляющую и первую зубцо-вую гармонику, т. е. X = Xo-fAiCOS2pP, где р - угол по окружности ротора, отсчитываемый от оси зубца; Р = а- 1 = а-шр if- 01 где - угол между осью зубца и лучом OA, отвечающим максимуму НС. Имеем B = XFi = koFim cos {pia - ml!) + KPim COS Zp (a - (Upt- о) cos x 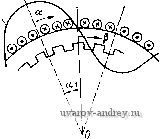 Рис. 3-39. К определению магнитной индукции в воздушном зазоре индукторного двигателя X (Pitt-at) = XoFimCOS {pia-(dt) -f -cos[(Zp-pi)a-f -f {(d-ZpOip) t - ZpOo] + COS [{Zp -f pi) a-(m-ZpCOp) t-Zpao]. Из этого выражения следует, что магнитное поле в воздушном зазоре содержит три составляющие: основное вращающееся маг- нитное поле с числом периодов по окружности статора, равным числу пар полюсов первичной обмотки, и два вращающихся маг-. нитных поля, возникающих вследствие зубчатости ротора; одно из этих полей имеет число периодов по окружности статора Zp-р и вращается при гр(Лр<1(л в сторону, противоположную направлению вращения основного магнитного поля; другое - с числом периодов Zp + Pi - вращается в направлении основного магнитного поля. Последние две составляющие магнитного поля могут взаимодействовать со вторичной обмоткой двигателя, если ее число пар полюсов равно рг = Zp ±Pi- По конструктивным соображениям целесообразно выбрать меньшее число пар полюсов, поэтому обычно Р2 = Zp-pi или Zp = Pi + Рз- В этом случае электромаг- Рис. 3-40. Т-образная схема замещения с учетом потерь в стали нитное взаимодействие между вторичной и первичной обмотками осуществляется за счет зубцовой гармоники магнитного поля, вращающейся навстречу основному магнитному полю. При замыкании вторичной обмотки на некоторое сопротивление в нее будет передаваться электромагнитная мощность. Поскольку эта гармоника генерируется зубчатым ротором, то к нему будет приложен электромагнитный момент в направлении основного вращающегося магнитного поля. Угловая частота ЭДС и токов, индуцируемых во вторичной обмотке, он 2= а - Zpcop. При вращении ротора со скоростью, лежащей в диапазоне скоростей от О до (o/Zp, угловая частота тока вторичной обмотки изменяется от со до 0. <ЦЗ аналогии с обьиными асинхронными двигателями можно ввести понятие скольжения = < р- с - Цр й)/гр - (Ор 0) - ZpWp Из изложенного следует, что в индукторных асинхронных двигателях угловая скорость ротора в режиме холостого хода oipo (o/zp, где Zp = pi -f Рг = (1 -f 2k) Pi. В аналогичном двигателе с ротором типа беличья клетка угловая скорость холостого хода равна a/Pi, г. е. ъ \ + 2k раз большеакого типа двигатели могут найти применение в устройствах, где понижающий механический редуктор нежелателен. Кроме того, характеристики этих двигателей можно изменять путем включения во вторичную 82 обмотку добавочных сопротивлений, например, емкостного. Для более существенного снижения угловой скорости ротора следует использовать машины с двусторонней зубчатостью на статоре и роторе и осуществлять работу при более высоких зубцовых гармониках поля. Расчет характеристик асинхронного индукторного двигателя при симметричном питании можно выполнить аналогично расчету обычного асинхронного двигателя, исходя из схемы замещения двигателя [13], изображенной на рис. 3-40. Здесь Хт - индуктивное сопротивление фазы первичной обмотки, соответствующее основному магнитному потоку; и xs - активное сопротивление и индуктивное сопротивление рассеяния первичной обмотки; Гг я х^- приведенные к первичной обмотке активное сопротивление и индуктивное сопротивление рассеяния вторичной обмотки; л:2 = Хт (4A,o/i - 1) - добавочное индуктивное сопротивление рассеяния вторичной обмотки, вызванное ее основным потоком; и х'с2 - приведенные добавочные активное и емкостное сопротивления во вторичной цепи. Глава четвертав СИНХРОННЫЕ ДВИГАТЕЛИ 4-1. Общие сведения Синхронными двигателями называются электродвигатели переменного тока, у которых угловая скорость ротора жестко связана с частотой сети. Они широко используются в установках проводной связи и радиосвязи, в самопишущих приборах, устройствах видео- и звукозаписи, звуковом кино, часовой промышленности, системах синхронных передач и программного автоматического управления. Статор синхронного двигателя имеет обмотку, образующую вращающееся магнитное поле. Так же как и в асинхронных машинах, это может быть трехфазная обмотка, двухфазная обмотка с пусковой емкостью (конденсаторный синхронный двигатель) или с пусковым сопротивлением, однофазная обмотка в двигателях с экранированным полюсом и т. д. Принципиальное отличие синхронных двигателей малой мощности друг от друга состоит в конструкции ротора, в зависимости от кбт^юй различают следующие типы синхронных двигателей: а) с постояннкми магнитами, б) гистерезисные, в) реактивные, г) субсинхронные, д) с катящимся или волновым ротором. Основным режимом работы синхронных двигателей малой мощности является синхронный режим, при котором ротор вращается с постоянной угловой скоростью, зависящей от частоты сети. В действительности, угловая скорость не остается строго постоянной, поскольку ротор двигателя может совершать колебания около положения, соответствуюш,его равенству электромагнитного момента моменту нагрузки. Запуск синхронных двигателей (исключение составляют гисте-резисные двигатели и двигатели с катящимся или волновым ротором) обычно осуществляется с помощью пусковой обмотки типа беличья клетка , располагаемой на роторе. При пуске двигатель находится в асинхронном режиме работы, электромагнитные процессы в нем достаточно сложны и зависят от типа двигателя. Синхронный двигатель как электрическая машина характе- 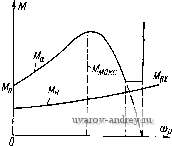 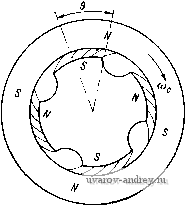 Рис. 4-1. Пусковая характери- Рис. 4-2. Принципиальная схема син-стика синхронного двигатели хронного двигателя с постоянными с беличьей клеткой магнитами ризуется следующими величинами: номинальной (синхронной) угловой скоростью со с; номинальной полезной мощностью Pgw или номинальным моментом Мд,; номинальным потребляемым током при номинальных напряжении питания и частоте сети; коэффициентом полезного действия т)д, и коэффициентом мощности cos ф^, в номинальном режиме; пусковой механической характеристикой-зависимостью асинхронного момента от угловой скорости ротора сор (рис. 4-1) или ее основными данными Мп, М„акс, sx, моментом входа в синхронизм Мвх и моментом выхода из синхронизма Мвых- Очевидно, что момент сопротивления нагрузки Мн должен быть меньше М^\ послевхода двигателя в синхронизм Мн можно увеличить, но не более чем до Мвых- 4-2. Синхронный двигатель с постоянными магнитами - Принцип работы. Устройство. Принцип работы синхронных двигателей с постоянными магнитами основан на взаимодействии врап1,ающегося магнитного поля обмотки статора с полем постоян- ных магнитов, расположенных на роторе. Если числа пар полюсов статора и ротора равны, а скорости вращения полей одинаковы (синхронный режим), то возникает постоянное электромагнитное притяжение разноименных полюсов статора и ротора (рис. 4-2), что вызывает появление электромагнитного момента. Этот момент, называемый синхронным, в среднем равен нулю, если скорость ротора отлична от синхронной. Поэтому синхронный двигатель только с постоянными магнитами не имеет пускового момента. Для пуска двигателя на роторе устраивают короткозамкнутую обмотку типа беличьей клетки, с помощью которой ротор двигателя разгоняется до скорости, близкой к синхронной, и под действием синхронного  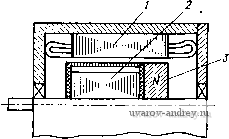 Рис. 4-3. Синхронный двига- Рис. 4-4. Синхронный двигатель с акси-тель с радиальным располо- альным расположением постоянных маг-жением постоинных магнитов нитов и короткозамкнутой обмотки и короткозамкнутой обмотки / - статор; 2 - короткозамкнутый ротор; 3 - 1 - статор; 2 - пусковое устрой- постоянный магнит ство; 3 - постоянный магнит момента входит в синхронизм. Таким образом, ротор двигателя должен сочетать в себе элементы синхронного двигателя (постоянные магниты) и асинхронного (короткозамкнутую обмотку). Наибольшее распространение на практике получили две конструкции синхронных двигателей с постоянными магнитами: с радиальным расположением постоянного магнита и пусковой короткозамкнутой обмотки (рис. 4-3) и с аксиальным их расположением (рис. 4-4). Статоры двигателей обоих конструктивных исполнений ничем не отличаются от статоров обычных асинхронных машин переменного тока: их пакеты набираются из изолированных листов электротехнической стали, а в пазах укладывается трехфазная или двухфазная обмотка. В первой конструктивной форме (рис. 4-3) пакет стали ротора выполнен в виде кольца, напрессованного на постоянный магнит. В кольцевом пакете имеются пазы для стержней беличьей клетки и междуполюсные прорези для исключения замыкания магнитного потока внутри ротора. Во второй (рис. 4-4) пакет стали ротора - обычный для асинхронного двигателя; располагается он на валу рядом с постоянными магнитами. Уравнения ЭДС н момент двигателя в синхронном режиме. Положим, что ротор синхронного двигателя вращается по часовой стрелке; тогда в системе координат, связанной с полюсами, обмотка 1 2 3 4 5 6 7 ... 18 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |