


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 2 3 4 5 6 ... 18 которую можно получить формальным образом из уравнений (2-15) путем исключения токов ротора. Решая уравнения (2-16) относительно токов If и /ьс, получаем j UD(ZDb + Z)-iUoZDb 2ZDfZDb + Z(ZDf+ZDb) UD(ZDf + Z) + jUoZD! 2ZDfZDb + Z(ZDf + ZDb) Ho ZDf + Z = ZQ + - сопротивление прямой по- 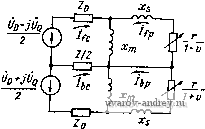 Uq-JUq 2 и a Фа z 7ш Рис. 2-8. Схема замещения двухфазной неявнополюсной машины следовательности фазы Q; Zob + Z = Zq-\- Рис. 2-9. Упрощенная схема замещения двухфазной асинхронной машины 1 + г; - со- противление обратной последовательности фазы Q, а 2ZDfZDb + Z {ZDS + Zi>b) = Zd! (ZDb + Z) + ZDb {Zd! + Z) = = ZDfZQb + ZobZqf, поэтому ffc - ZQb - iUQZpb . ZDfZpb + ZDbZqf : OpZQf + jUQZDf be-- ZofZQb + ZpbZQf что совпадает с полученными выше выражениями для токов (2-12), Момент двигателя находим по формуле (2-17) (О где Е'- вектор, составляющие которого равны коэффициентам при v в вн-Ражении Z/. Получим М = А R е [ /fp ( - jxjfc - jxifp) + I bp {]xm / be + ixf bp)} (0 = Jf Re i-ilfpifc + ftp/be) (2-18) Из (2-15) имеем Ifp= -- ix + Подставляя в формулу (2-18), находим 1 -г;  Рис. 2-10. Схема замещения однофазного асинхронного двигателя = - и% Re Ы - о) - 1с Re Ы - d)1 (2-19) Если в сеть включена только одна обмотка D. а вторая обмотка Q разомкнута (Zq = °о), то асинхронная машина работает в режиме однофазного двигателя. Соответствующая этому режиму работы схема замещения получится из рис. 2-8 при (/q = О и Z = 00. Она изображена на рис. 2-10. В том случае, когда фазы D и Q не перпендикулярны, а смещены на некоторый угол а (см. рис. 2-1), формулы для НС прямой и обратной последовательности имеют вид 2 (2-20) L (f/ f>-/ ); sin a sin a (2-21) вид Соответственно этому матрица преобразования для токов статора имеет sin а j L sin а sin a -/ sin a Матрица сопротивлений такой машины получается по общему правилу и в осях, связанных с обмотками статора, имеет вид Для перехода к уравнениям ЭДС симметричных составляющих используем матрицу преобразования для токов
Новая матрица сопротивлений и вектор напряжений находятся по формулам т : С ZC; и =си. Соответствующие вычисления предлагается читателю выполнить самостоятельно. В результате получаем /р + fXm - -/2a 2sinia > 2sinia Z -fZ,2a z + Z 2sin2a ixm(l-v) 0 2 sin* a fp jXm jXm(l+V) r+jx(l-v) 0 fXm 0 r + ix(l + v) ЧАСТЬ ВТОРАЯ ЭЛЕКТРОДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ ОБЩЕГО ПРИМЕНЕНИЯ Глава, третья АСИНХРОННЫЕ ДВИГАТЕЛИ 3-1. Основные типы асинхронных двигателей Асинхронные двигатели малой мощности общего применения используются для электропривода постоянной скорости вращения, в котором требования по поддержанию скорости сравнительно невелики. В зависимости от вида питающего напряжения и обмотки статора различают трехфазные, двухфазные и однофазные асинхронные двигатели. Трехфазные асинхронные двигатели имеют на статоре трехфазную распределенную обмотку, ротор двигателя короткозамкнутый (обычно беличья клетка ). Теория работы этих двигателей при симметричном трехфазном питании изложена в общих курсах электрических машин и в настоящей книге рассмотрена весьма кратко (см. § 3-3). Двухфазные асинхронные двигатели малой мощности с короткозамкнутым ротором обычно используются как конденсаторные двигатели, в которых в одну из фаз включена емкость, обеспечивающая фазовый сдвиг токов в обмотках, близкий к 90°. Такие двигатели питаются от однофазной сети. Для получения малых скоростей рртора иногда применяют асинхронные индукторные двигатели, имеющие трехфазную или двухфазную обмотку на статоре и вторичную однофазную или многофазную обмотку, располагаемую также на стато^еУЧисло пар полюсов этих обмоток выбирается таким образом, чтобы исключить трансформаторную связь между обмотками. Ротор зубчатый, обмоток не имеет и выполняет роль модулятора магнитного поля. Во вторичную обмотку асинхронного индукторного двигателя включается активное сопротивление или емкость. Большинство асинхронных электродвигателей малой мощнти выполняется однофазными; они имеют однофазную рабочую обмотку на статоре и короткозамкнутый ротор. При наличии только одной обмотки на статоре и симметричном магнитопроводе однофазный асинхронный двигатель имеет пусковой момент, равный нулю, поэтому для получения пускового момента, отличного от нуля, в двигателе предусмотрена вторая, вспомогательная обмотка на статоре, ось которой сдвинута относительно оси основной обмотки на 90°. Асинхронные Двигатели малой мощности можно разделить на следующие группы: 1) однофазные двигатели с реостатным пуском - включением активного сопротивления во вспомогательную обмотку (фазу) на время пуска; 2) однофазные двигатели с дросселем, включаемым во вспомогательную фазу на время пуска (на практике этот тип машин встречается весьма редко); О О и а О О а о О
о Рис. 3-1. Схемы включения однофазных асинхронных двигателей в сеть: а - с пусковым сопротивлением; б- с пусковым дросселем; в - с пусковым конденсатором; г - с рабочим конденсатором; д - с пусковым и рабочим конденсаторами; е - с экранированным полюсом 3) однофазные двигатели с включением конденсатора во вспомогательную фазу на время пуска; 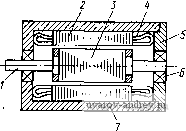 Рис. 3-2. Конструктивная схема асинхронного двигателя ; - вал; 2 - пакет статора; 3 - корот-козамкнутый ротор; 4 - обмотка статора; 5 - подшипниковый щит: 6 - подшипник; 7 - корпус 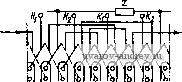 Г \( \< \( V \А Рис. 3-3. Принципиальная схема асинхронного двигателя с двухзуб-цовыми обмотками 4) двухфазные конденсаторные двигатели с постоянно включенным рабочим конденсатором; иногда эти двигатели имеют дополнительный пусковой конденсатор, включаемый параллельно рабочему на время пуска; 5) универсальные асинхронные двигатели, рассчитанные для работы как от трехфазной, TajtJH однофазной сети переменного тока; 6) однофазные асинхронные двигатели с экранированными полюсами; 7) асинхронные индукторные двигатели. На рис. 3-1 даны схемы включения однофазных асинхронных двигателей в сетьо своей конструкции однофазные асинхронные двигатели (исклк е1Гие составляют двигатели с экранированными полюсами) выполняются как неявнополюсные электрические машины с распределенными обмотками на статоре; ротор - коротко-замкнутый типа беличья клетка , как правило, со скосом пазов на одно зубцовое деление (рис. 3-2). У двигателей первых трех типов, имеющих вспомогательную пусковую обмотку, главная фаза занимает */з всех пазов статора, а вспомогательная обмотка - V3 пазов. Иногда вспомогательная пусковая обмотка частично выполняется бифилярной; такой двигатель не требует внешнего пускового активного сопротивления, его функции выполняет бифилярная часть обмотки. Конденсаторные двигатели имеют на статоре две однотипные обмотки, сдвинутые в пространстве относительно друг друга на 90°. Универсальные асинхронные двигатели имеют симметричную трехфазную обмотку. Асинхронные двигатели с экранированными полюсами выполняются как явнополюсные машины с числом полюсов от двух до восьми. Полюсы имеют пазы, и часть полюса охвачена короткозамкнутым витком, служащим для образования вращающегося поля (см. § 3-8). Асинхронные индукторные двигатели имеют большое число различных модификаций как по форме магнитопровода, так и по схемам обмоток [13]. На рис. 3-3 в качестве примера приведена схема двухфазного асинхронного индукторного двигателя с двух-зубцовыми обмотками. 3-2. Величины, характеризующие работу асинхронного двигателя , Асинхронные двигатели общего применения работают при номинальных напряжении и частоте сети, их частота вращения при изменении нагрузки колеблется незначительно: от частоты холостого хода По Л5 Пс = 60 fjp до номинальной частоты nj = = (1-Sf) Пс, где Sfj - номинальное скольжение. Зависимость момента, развиваемого двигателем, от частоты вращения имее вид, представленный на рис. 3-4. Здесь М„ - пусковой момент при п = 0; Mfj,- номинальный момент; Л1 акс - максимальный момент; Пк - критическая частота, соответствующая максимальному моменту. Основным режимом работы асинхронных двигателей является номинальный режим; он характеризуется следующими данными: номинальной мощностью на валу Ралг! номинальной частотой вращения tif], об/мин; синхронной частотой поля с, об/мин; номи- ййльным током /jv; КПД в номинальном режиме Т1д^; коэффициентом мощности cos фд,. По приведенным данным можно рассчитать и другие величины: номинальный момент и - - I потребляемую мощность номинальное скольжение = 1 - П^Пс.
Рис. 3-4. Механическая характеристика трехфазного асинхронного двигателя 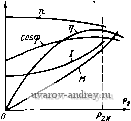 Рис. 3-5. Рабочие характеристики асинхронного двигателя Для приближенной оценки пусковых свойств асинхронного двигателя приводят: кратность пускового тока 1 /1и; кратность пускового момента MJMif-, кратность максимального момента, или перегрузочную способность Двигателя М^кс/М^; максимальную добротность при пуске Мп пмакс; момент инерции ротора J; Свойства двигателя при изменении момента на валу определяются его рабочими характеристиками, которые представляют собой зависимости потребляемого тока /, момента М, частоты вращения п, КПД т) и коэффициента мощности cos ф от полезной мощности на валу при. U = Uf а fi = fitj- На рис. 3-5 представлены типовые рабочие характеристики трехфазного асинхронного двигателя малой мощности. 3-3. Асинхронный двигатель в симметричном режиме Многофазный асинхронный двигатель работает в симметричном режиме, если его обмотки одинаковы, а приложенные напряжения равны по амплитуде и смещены по фазе на угол 2я/т, где/п число фаз. В трехфазной машине фазовый сдвиг между напряжениями равен 120°, а в двухфазной 90°. Двухфазную машину можно условно рассматривать как машину с четырьмя симметричными обмотками (рнс. 3-6), токи в которых смещены по фазе на 90°: /i = /d; /2 = /q = d = Отличительная особенность Симметричной асинхронной машййы tottont в том, что в ней образуется круговое вращающееся магнитное поле и электромагнитные процессы в фазах протекают одинаково, со смещением во времени на угол 2л/т. Рассмотрим уравнения ЭДС и момента симметричного двухфазного двигателя (рис. 3-7). Напряжение, приложенное к фазе Q, при выбранном направлении вращения ротора опережает напряжение фазы D на 90 , т. е. On = jUd- Полагая Zd = Zq, уравнения ЭДС (2-15), выраженные через симметричные составляющие, запишем в виде (для удобства переставлены местами строки и столбцы и fp) 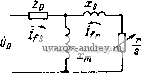 Рис. 3-6. Представление двухфазной машины в виде четырехфазиой Рис. 3-7. Электрическая схема двухфазного асинхронного двигателя Рис. 3-8. Схема замещения асинхронного двигателя в симметричном режиме Zd + jXm jXm 0 0 6c 0
+ix (3-1) Как видно из этих уравнений, токи прямой и обратной последовательности в симметричной машине не зависят друг от друга. Поскольку при симметричной системе напряжений напряжение обратной последовательности равно нулю, то и токи, ему соответствующие, также равны нулю: /ьс = = hp = 0. Уравнения ЭДС двигателя примут вид Zd+ jXm jXm
где s = 1-t; - скольжение. Этой системе уравнений соответствует общеизвестная схема замещения асинхронного двигателя, изображенная на рис. 3-8. Токи в фазах статора и ротора равны /fC = ; Ud . (3-3) здесь L s J V s или, если ввести обозначение а = 1 + Ео/Цхт), А = /ДСт o + Zd 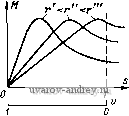 Рис. 3-9. Механические характеристики асинхронного двигателя при различном активном сопротивлении ротора
Рис. 3-10. Кривые моментов однофазного асинхронного двигателя ДИМ Подставляя эти выражения для токов в формулу момента (2-18), нахо- М = 2 Полагая приближенно а = 1 + (r/s + jXs)a + ZD Г Го + ixD (3-4) яй 1 --= 0, получим IXm Хт известную из общего курса электрических машин формулу момента симметричного двухфазного асинхронного двигателя ris с ( D + Orlsf + (JCDs + OXsf (3-5) Скольжение, при котором момент имеет наибольшее значение, называется критическим и находится из условия dMids = 0: (3-6) Соответствующий ему максимальный момент Ломаке = - rD-lrl + {xDs + X,f (3-7) Важная особенность этого выражения состоит в том, что максимальный момент симметричного асинхронного двигателя не зависит от активного сопротивления ротора; с изменением активного сопротивления ротора смещается максимум в кривой момента (рнс. 3-9). Зависимости момента двигателя от скольжения можно придать более простую форму, если выразить момент в долях Ммакс- Используя приведенные выше выражения, нетрудно получить М 1 + fltSK = 2- s/Sk + Sk/s -f 2aSK (3-8) где a= ro l(pr). Выражение для момента (3-8) называется формулой Клосса. 3-4. Момент однофазного асинхронного двигателя При включении в сеть одной обмотки асинхронного двигателя момент на валу образуется только при вращении ротора и направлен он в сторону вращения ротора. Качественно зависимость момента от угл,овой скорости наиболее просто проследить, исходя из теории вращающихси полей. Разложим пульсирующее магнитное поле однофазного двигателя на два вращающихся в противоположные стороны круговых поля. Кривые моментов, создаваемых каждым из этих полей, рассматривались в предыдущем параграфе; они имеют вид, представленный на рис. 3-10. Результирующий момент двигателя равен разности моментов от прямого и обратного вращающихся полей Как видно из кривой, результирующий момент равен нулю при неподвижном роторе {v = 0); это обусловливает необходимость включения вспомогательной обмотки с фазосдвигающим сопротивлением при пуске двигателя (см. рис. 3-1). Для получения Зависимости момента однофазного асинхронного двигателя От его параметров и угловой скорости используем уравнения обобщенной электрической машины (1-23). Для данного случая неявнополюсной машины с одной обмоткой на статоре они имеют вид r+}xU) VX{j) r + jx }
(3-9) где r -\- jx - полное сопротивление обмотки ротора при разомкнутой обмотке статора; г -f jx Q) - полное сопротивление обмотки ротора при замкнутой накоротко обмотке статора; Ё = - jx----ЭДС , rD + j(Xm + Xds) индуцируемая в обмотке ротора в режиме холостого хода. Момент двигателя в соответствии с формулой (1-25) будет Л1 = Re [ - Idigx + Igiax (j) + j/gEl ,COc (3-10) Из уравнений (3-9) находим выражения для токов Ё , . . , Ё .lr + jx(\-v)]; irv; A==r + ir(x + x (/)] - XX (/) (l-v). Подставляя выражения для токов в формулу (3-10), получаем £2 (Ос lai rvlx(l-v) - r]. (3-11) Отсюда видно, что при v = О момент двигателя равен нулю. В отличие от идеального трехфазного двигателя относительная скорость холостого хода однофазного асинхронного двигателя всегда меньше синхронной и равна Уо = --, а максимальный момент дви- r >r >r 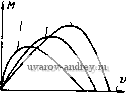 Рис. 3-11. Механические характеристики однофазного асинхронного двигателя при различном активном сопротивлении ротора гателя зависит от активного, сопротивления ротора. На рис. 3-11 приведены кривые зависимости момента однофазного двигателя от скорости при различном активном сопротивлении ротора. Аналогичную формулу момента можно найти из схемы замещения однофазного двигателя, полученной по методу симметричных составллющих и изображенной иа рис. 2-10. В этом случае с = /ьс = и согласно формуле (2-19) 1 -V + / (.Хт + Us) Выполняя несложные алгебраические квадратных скобках, находим преобразования выражения в М = - -2xrv{x+x) получим 2е)с -f 2г/ (Xm + Xs)- (Хт + Xs) (1 - г;) Освобождаясь от мнимости в знаменателе и обозначая Хт + JCs = х, ХтХГО Формулы (3-11) и (3-12) отличаются тем, что в первой момент выражен через ЭДС в режиме холостого хода, а во второй - через ток, потребляемый главной фазой двигателя. Из обеих формул следует, что при г> X однофазная асинхронная машина при малых скоростях работает в тормозном режиме. Расчеты и опыт показывают, что максимальный момент однофазного асинхронного двигателя на 30-40% меньше, чем у трехфазного двигателя, выполненного в тех же габаритах. 3-5. Однофазный двигатель с пусковым сопротивлением Как указывалось в § 3-1, для получения пускового момента, отличного от нуля, и улучшения пусковых свойств однофазного асинхронного двигателя на статоре размещают вспомогательную обмотку, включаемую в сеть через пусковое сопротивление. В качестве такого сопротивления обычно используют активное сопро- (3-12) №йлёнйе или емкость; При эТоМ активное сбпроТивлбнйе МОже* быть либо внешним, либо внутренним (за счет выполнения вспомогательной обмотки из провода меньшего сечения или укладки бифи-лярных витков). Индуктивность в качестве пускового сопротивления применяется сравнительно редко. На рис. 3-12 даны векторные диаграммы токов в фазах двигателя при неподвижном роторе для различных типов пусковых сопротивлений. Как видно из диаграмм, при включении во вспомогательную фазу активного сопротивления или индуктивности фазовый сдвиг между токами и соответственно между НС всегда меньше 90°; это означает, что образуемое в двигателе магнитное- поле является эллиптическим; при включении во  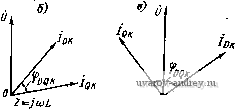 Рис. 3-12. Векторные диаграммы токов однофазного асинхронного двигателя при фазосдвигающем сопротивлении разного типа вспомогательную фазу емкости можно в принципе подобрать ее значение таким образом, чтобы магнитное поле при пуске было круговым. Выбор способа пуска, значения пускового сопротивления и числа витков вспомогательной и главной фаз в однофазном двигателе представляет собой довольно сложную задачу, которая должна решаться с учетом заданных кратностей пусковых момента и тока, а также экономических затрат при производстве и эксплуатации двигателей. Рассмотрим более подробно эту задачу для однофазного двигателя, у которого главная фаза занимает в два раза больше пазов, чем вспомогательная, а последовательно со вспомогательной фазой в общем случае включено активное сопротивление Гн и емкость С (рис. 3-13). Пусть К = Q да --коэффициент трансформации фаз Q и D (обмоточные коэффици- еиты ko6Q и *об D принимаем равными); t = Sp/Sq - отношение площадей поперечного сечеиия проводов обмоток. Используя известные выражения для активного сопротивления обмотки и индуктивного сопротивления рассеяния, можно найти связь между этими параметрами фаз D и Q [21]: г|=2/С<Гд; х1=2К^х^. Здесь и в дальнейшем индексом сверху обозначены действительные (неприведенные) сопротивления, токи и напряжения фазы Q. Приведенное к фазе D полное сопротивление фазы Q будет к 2XDS--- и, следовательно, Z = - Zo = (2- l) .о + + / {xos - . (3-14) Приведенные значения приложенных напряжений: Ud = U; Uq=U/K. Для пускового режима (а = 0) сопротивления фаз прямой и обратной последовательности равны между собой: Df=ZjJi - Zjj; Zgf = Zqj == Zjr, + Z. Подставляя эти значения в формулы (2-17), получим токи  и L Zo k{zd + z) J L Zo K{Zd+Z) (3-15) a затем no .формуле (2-19) при у = О - пусковой момент Рис. 3-13. Электрическая схема однофазного двигателя с емкостью и пусковым сопротивлением во вспомогательной фазе (3-16) где Qi-jbi = \IZd - проводимость главной фазы в пусковом режиме; - приведенная проводимость вспомогательной фазы в Si - ibi = Zd+Z пусковом режиме. Из формулы (3-16) следует что, уменьшая коэффициент трансформации К, можно получить необходимое значение пускового момента. Однако следует иметь в виду, что значение К ограничено снизу значением пускового тока. Отношение общего пускового тока к пусковому току главной фазы -=1+. = 1 + K{za+Z) =1 + - k{\ + z]zd) (3-17) Dv. Dk Совместное решение уравнений (3-16) и (3-17) позволяет иайти коэффициент трансформации и пусковое сопротивление. В общем виде эта задача неразрешима; для данного типа пускового сопротивления оиа может быть решена с помощью ЦВМ. В ТОМ случае, когда параметры фаз D п Q двигателя известны, выбор пусковой емкости и пускового активного сопротивления можно сделать по одному из следующих параметров: максимальному пусковому моменту, максимальной добротности при пуске, заданному пусковому моменту или току. Рассмотрим эту задачу для пусковых сопротивлений двух типов, применяемых на практике. 2п = п- Емкостное пусковое сопротивление. Пусковые токи в фазах двигателя равны / QK = RoK + ix Qk + /{xqk~Xc) где Rdk, лгок-и Rqk, atqk - активные и индуктивные сопротивления фаз D к Q, соответствующие режиму короткого замыкания (S = 1). (Согласно формуле (2-14) пусковой момент двигателя Ма = KIdJqk sin <Pbq к, где К' - постоянная величина, зависящая от параметров ротора. Построим векторную диаграмму токов при пуске двигателя (рис. 3-14). Вектор тока главной фазы /дк отстает по фазе от напряжения на угол Фок, определяемый равенством tg Фок = XdJRdk- Конец вектора /qk при изменении сопротивления конденсатора Хс описывает окружность диаметром \AB\=UIRq; сам вектор /qk сдвинут по фазе от напряжения U на угол Фрк== = arctg-~ 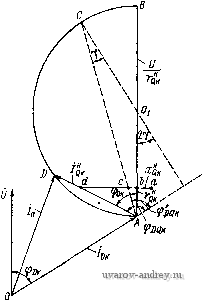 Для полу- Рис. 3-14. Векторная диаграмма токов однофазного двигателя с пусковой емкостью чения вектора /qk надо отложить вдоль диаметра окружности Л В отрезок А Ь, пропорциональный Rqk, перпендикулярно ему вправо отрезок Ьа, пропорциональный Xqh, и влево - отрезок ad, пропорциональный Проведя прямую из точки А через точку d до пересечения с окружностью в точке D, получим вектор /qk- Вектор 0D равен пусковому току, потребляемому двигателем из сети, /п = /ок + /ск- Пусковой момент двигателя пропорционален /QкSinфoQк. т. е. длине перпендикуляра, опущенного из конца вектора /qk на вектор /ок. Максимальный момент соответствует такому емкостному сопротивлению хс, при котором этот перпендикуляр проходит через центр окружности 0, что соответствует точке С на круговой диаграмме. При этом Это означает, что при максимальном моменте магнитное поле двигателя является эллиптическим. Емкостное сопротивление пропорционально отрезку ас и равно Хс = 4к -f Rqvi tg V = 4к -f /?QK tg (я/4 -фок/2). Если при пуске необходимо обеспечить максимальное отношение MJIn (максимальную добротность), это требование соответствует такой точке круговой диаграммы, в которой вектор /п касается окружности. Пусковая емкость в этом случае меньше, чем при максимальном моменте, так как соответствующее ей емкостное сопротивление (отрезок ad) больше. В общем случае при любом ус- 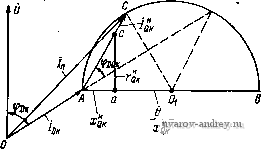 Рис. 3-15. Векторная диаграмма токов однофазного двигателя с активным пусковым сопротивлением ловии пуска можно найти емкостное сопротивление так: определяем графически /qk для заданного требования при пуске, а затем находим Активное пусковое сопротивление. Пусковые токи в фазах D и Q равны Ок.- и Векторная диаграмма ТОКОВ изображена на рис. 3-15. При изменении сопротивления Гп конец вектора /qk описывает окружность диаметром U/xqk- Как и выше, пусковой момент пропорционален длине перпендикуляра, опущенного из конца вектора /qk на продолжение вектора /дк. Пусковой момент будет максимальным, если этот перпендикуляр проходит через центр окружности Qi-При этом ф£ дк = Фок/2; Гп = х^к ctg (фок/2) - Rqk- В общем случае в зависимости от требований при пуске можно графически найти пусковой ток фазы /qk, а затем Q.=/{wrQ.У-xt и r =i?QK-/?K. 3-6. Конденсаторный двигатель Двухфазный асинхронный двигатель, в одну из фаз которого постоянно включена емкость, называется конденсаторным. Для питания двигателя используется однофазная сеть переменного тока (рис. 3-16). Емкость и коэффициент трансформации обмоток иногда выбираются таким образом, чтобы в нормальном режиме работы фазовый сдвиг между токами составлял 90° и в машине было образовано круговое вращакхдееся магнитное поле. Рассмотрим условия, при которых магнитное поле в конденсаторном двигателе будет круговым. Обозначим Zd - Гр + jxo - полное сопротивление фазы D; Z = Zl- /дг - неприве-денное полное сопротивление фазы Q; -коэффи- циент трансформации. Тогда
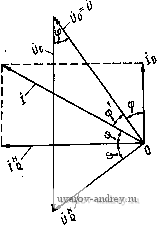 Рис. 3-16. Электрическая схема конденсаторного двигателя Рис. 3-17. Векторная диаграмма токов и напряжений конденсаторного двигателя Tq - /CVд; jiq = }(Хр\ tg фо = tg фQ = tg ф = Xolro = х\1г\\ (3-18) Векторная диаграмма токов и напряжений, соответствующая круговому магнитному полю в машине, изображена на рис. 3-17. При построении векторной диаграммы следует учитывать, что токи в фазах двигателя /д и 1\ отстают по фазе от соответствующих напряжений на угол ф, а напряжение на конденсаторе Щ отстает рт тока 1\ иа 90°. Для получения кругового поля токи /д и Iq должны быть сдвинуты по фазе на 90°, а соответствующие им НС /дШоКобо = -№оКобс или Io==-jIK- (3-19) Из векторной диаграммы находим и c=Uq/sin (f; ;H 7НГН 1/D DD Л (3-20) Реактивная мощность конденсатора, определяющая его габа. риты, Рс = UcIq. Отнощение ее к полной мощности S, потребляемой двигателем, будет (3-21) Ток, потребляемый конденсаторным двигателем из сети, / = /d + /q = /d(H- K); sin ф (3-22) Из треугольника токов на рис. 3-17 находим ф' + ф + ф = я/2; отсюда коэффициент мощности конденсаторного двигателя cos ф'=со8 - 2ф^ = sin 2ф. (3-23) Соотношения (3-20) определяют условия получения кругового поля в двигателе, которые для заданных параметров двигателя, зависящих от скорости ротора, могут быть реализованы при вполне определенных значениях емкости и коэффициента трансформации. Следует отметить, что коэффициент трансформации, относительная реактивная мощность конденсатора и cos ф' конденсаторного двигателя зависят только от фазового сдвига между током и напряжением симметричного двигателя. На рис. 3-18 приведены зависимости этих величин как функции коэффициента мощности симметричного двигателя. Практическое значение имеет область, находящаяся в пределах 0,7<cos ф<0,9. При COS Ф = 0,707 двигатель потребляет из сети только активный ток (cos ф' = 1). Относительная мощность конденсатора тем больше, чем выше cos ф двухфазной машины. Поэтому с точки зрения стоимости конденсатора желательно иметь более низкий cos ф. Однако снижение cos ф за 0,707 нецелесообразно, так как мощность конденсатора уменьшается незначительно, а cos ф' - сильно. Расчет пускового момента и механической характеристики при пуске двигателя можно выполнить методом симметричных составляющих (см. § 2-2). Токи прямой и обратной последовательности получим из (2-17) при О о = = и я Uo = UlK: 110=и ZofZQb + ZDbZqf f TJ ZQf±JZDflK bc - U --------, OfQb + Zob-Qf (3-24) причем Zdj, ZDb, Qf> Qb определяются no схемам замеще- Рис. 3-18. Зависимость К, PdS и cos ф' от коэффициента мощности симметричного двигателя COSf W 0,8 0,6 0,2 О
0 0,2 Ofi 0,6 0,8 cos ния, приведенным на рис. 2-7, если в них Zq заменить на Zd - Подставляя выражения для токов (3-24) в формулу (2-19), находим Шс 1 ZDfZQb -f ZDbZQS f Zqb-iZoblf rRl-v) \ZQf + iZDf/K\rKl + v) (3-25) Расчет момента по формуле (3-25) можно выполнить с помощью ЦВМ. Из формул (3-24) нетрудно найти выведенные выше условия получения кругового вращающегося поля при включении емкости во вспомогательную обмотку. Поле будет круговым, если Дс = О или Zqi + jZDflK = 0. Подставляя сюда значения Zq/ и Zof, соответствукщие схемам, приведенным на рис. 2-7, получим Отсюда К = XdITo, X с = TdK -]-XdK = Xd-\- Xq, что совпадает с (3-20), так как Следует otMefHtb, 4t6 МаЛоМощйыё KoнДeнcatopHЫe ДВИГаТеЛи часто работают при переменной нагрузке и скорость их изменяется от номинальной до скорости холостого хода. В этом случае выбор емкости из условия получения кругового магнитного поля в номинальном режиме может привести к возрастанию потерь в режиме холостого хода и перегреву двигателя; это объясняется значительным ростом напряжения на фазе Q в режиме холостого хода и потерь от токов обратной последовательности. Для определения! емкостного сопротивления и коэффициента трансформации при переменных нагрузках следует исходить из допустимых потерь двигателя в режиме холостого хода и под нагрузкой. Зная параметры главной фазы, определяем отношение потерь в двигателе к электромагнитной мощности V = = ДР/Рэм и строим в координатах хс, К зоны равных потерь, т. е.зоны, внутри которых АР отличается от соответствующего значения при круговом поле на заданную величину. На рис. 3-19 в качестве примера приведены зоны равных потерь двигателя 180 Вт, 1500 об/мин; в номинальном режиме (s = 0,05)- - сплошные линии, в режиме холостого хода - штриховые. ки - точка, отвечающая круговому полю; этой точке соответствует увеличение потерь в режиме холостого хода для данного типа двигателя на 15 %. Если допустить увеличение потерь в машине для обоих режимов на 5 %, то получим значения хс и Л', соответствующие точке МП (минимальные потери). При этих значениях емкости и коэффициента трансформации поле в номинальном режиме отличается от кругового, а пусковой момент несколько уменьшается. На практике пользуются следующей рекомендацией: если двигатель спроектирован для получения кругового пол? в номинальном режиме, то для его работы в режиме холостого хода емкость выбирают, исходя из получения кругового поля при скольжении, соответствующем номинальной нагрузки. . 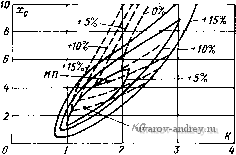 Рис. 3-19. Зоны равных потерь конденсаторного асинхронного двигателя 3-7. Универсальный асинхронный двигатель Асинхронные двигатели, рассчитанные для работы от сети как трехфазного, так и однофазного переменного тока, называются универсальными асинхронными двигателями (УАД). Эти двигатели имеют симметричную трехфазную обмотку на статоре и коротко-замкнутый ротор типа беличья клетка . Обмотка статора имеет 6 выводных концов. При работе двигателя от трехфазной сети его обмотки статора соединяются звездой; в этом случае режим работы двигателя симметричный, соответствующий круговому вращающемуся полю. В однофазную сеть двигатель обычно включается по схемам, приведенным на рис. 3-20. Первая схема (рис. 3-20, а) фактически равноценна схеме двухфазного конденсаторного двигателя (см. § 3-6), в котором фаза D состоит из двух фаз В и С трехфазного двигателя с числом витков а)о = 2а)ф|/3/2 = ШфУТ, а фаза О есть фаза А трехфазяого двигателя с числом витков = Шф. J<oэффициeнт трансформации фаз D и Q равен К = о'д/о'о = 1/13 . Согласно формулам § 3-6, условиями получения кругового поля при включении емкости в фазу А будут 1) tg9 = /<= l/j/S или ф = ЭО°, 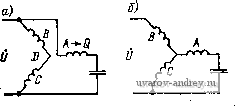 Рис. 3-20. Схемы включения обмоток статора трехфазного двигателя в одиофазиую сеть что соответствует cos Ф == 0,866 трехфазной машины, и 2) *с = 2ф :22ф. Реактивная мощность конденсатора V cos Ф / же (3-26) хс Ч COS Ф у хс згф Расчет характеристик даигателя при работе от однофазной сети можно выполнить методом симметричных составляющих [21]. Найдем сопротивления прямой и обратной последовательности фаз D и Q. Обозначим: Тф, х^, Хт - активное сопротивление, индуктивное сопротивление рассеяния фазы трехфазной обмотки, индуктивное сопротивление намагничивания; Гр, Xps - активное сопротивление и иидуктивиое сопротивление рассеяния обмотки ротора, приведенные к фазе трехфазной обмотки статора. ., Коэффициент приведения сопротивлений ротора к двухфазной обмотке с числом витков главной фазы D = 2. Аналогично коэффициент приведения сопротивлений ротора к вспомогательной фазе Q 2 3 Параметры схем замещения фаз D и Q, полученных соединением трехфазной обмотки по схеме рис. 3-20, а. будут: Го = 2гф - активное сопротивление фазы D; хр = 2 дсф, - иидуктивиое сопротивление рассеяния фазы D. = ( о/®!) *т = 3*т ~ сопротивление взаимной индукции фазы D; Грр= К5*р'р= 2Гр -активное сопротивление ротора, приведенное к фазе D; ХрР= Kx, = 2xt~ индуктивное сопротивление рассеяния ротора, 3 Заказ М 678 1 2 3 4 5 6 ... 18 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |