


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 2 3 4 5 ... 18 Однако и в этом случае выражение для момента машины при произвольных приложенных напряжениях оказывается достаточно сложным. Расчет характеристик двухфазной асинхронной машины может быть выполнен по схеме, соответствующей уравнениям'ЭДС в осях d ¥1 q. Для получения этой схемы запишем уравнения ЭДС в явном виде, полагая 0=0 = 0: JXmid-vxJq + {r + jx) ii-vxig = 0; VXmiD + iXmlQ + VXla + {г + jx) / = 0. (1-18) /7+v % 5 f? jOq Рис. 1-7. Схема замещения неявнополюсной электрической машины переменного тока Преобразуем третье и четвертое уравнения, исключив из них токи Id и Iq. Умножая четвертое уравнение на - jv, складывая его с третьим и деля на 1-гг*, получим Умножая третье уравнение (1-18) на jv, складывая с четвертым и деля на 1-гг*, найдш Заменяя х на x+Xs, а 1-1+0 1 у2 жая второе уравнение (1-18) на /, окончательно получим / Uq = (Zq + jx )jiQ + jxJIq. И умно- (1-19) Нетрудно видеть, что этой системе уравнений соответствует схема замещения, изображенная на рис. 1-7. При v = О схема замещения распадается на две независимые схемы фаз D к Q, соответствующие режиму короткого замыкания. Следует отметить интересную особенность схемы замещения. Токи в контурах q к Q сдвинуты по фазе на 90° по отношению к действительным токам в обмотках. Физически это объясняется тем, что электрическая связь между схемами замещения двухобмоточных трансформаторов по осям D и Q происходит через контуры ротора Вид из-за ЭДС вращения. Но ЭДС вращения сдвинута по фазе относительно трансформаторной ЭДС на 90°; поэтому для Рис. 1-8. Преобразованная схема замещения неявнополюсной электрической машины переменного тока согласования падений напряжений в схеме замещения необходимо токи в контурах 9 и Q также повернуть на 90°, т. е. умножить на /. Если звезду активных сопротивлений на рис. 1-7 преобразовать в треугольник по известным формулам, то получим схему замещения двухфа.9-нон асинхронной машины, изображенную на рис. 1-8. 1-3. Исключение неизвестных токов из уравнений ЭДС При определении токов и момента в электрических машинах переменного тока в некоторых случаях целесообразно уменьшить число неизвестных токов путем исключения их из уравнений ЭДС. Так, например, для асинхронного тахогенератора (см. § 7-4) нет необходимости вычислять токи в короткозамкнутом роторе, а при расчете механических характеристик управляемого двигателя- токи в статоре. Исключение токов статора или ротора наиболее просто выполняется при матричной форме уравнений ЭДС. Уравнение ЭДС обобщенной электрической машины запишем в развернутом виде
(1-20) 27 Введем двухмерные векторы токов и напряжений статора и ротора и матрицы сопротивлений в соответствии с разделением, выполненным штриховыми линиями в уравнении (1-20):
2i = DV ro + jxD 0 QL о rq+jXQ J J-md Хщ - Xmd JXtng jXmd 0 JXttlg - Я r+JXg J Тогда уравнение (1-20) запишем в виде двух матричных уравнений которые могут быть сведены к одному уравнению относительно токов статора или ротора. Исключим токи статора. Из первого уравнения (1-21) находим /i = Z7t/i-Zl Zg/a, где Zr - матрица, обратная по отношению к Zy. Подставляя вектор тока /1 во второе уравнение (1-21), получим [Z-ZZT%) 1\ = U,-Z,ZTUr или Zih = U2. (1-22) где Zi = Zi-ZgZrZj - матрица переходных сопротивлений ротора; и'2 = t/2-ZgZrf/i - новый вектор приложенных к ротору напряжений. Используя выражения для Z, Z, Z3, Z4, получим для определения токов ротора матричное уравнение r + jxdii) VXd (j) Я - XgiJ) r+JXgiJ) Ud + Ed + ivEg L Ug+Eg-ivEd J где Xd(j) = Xi- XgiJ)=Xg - (1-23) переходные co- противления фазы ротора по продольной и поперечной осям; D.e=~Q-трансформаторные ЭДС, ин- дуцируемые в фазах ротора (здесь и в дальнейшем индекс тр у трансформаторной ЭДС будем для упрощения записи опускать); jvE - jvEd - ЭДС вращения. Уравнение (1-23) показывает, что после исключения токов статора вид уравнений ЭДС для ротора не изменился. Однако параметры ротора стали переходными, они определяются с учетом воздействия короткозамкнутых контуров статора. Кроме того, в цепях ротора появились трансформаторные ЭДС и ЭДС вращения, которые индуцировались бы в роторе при разомкнутых его обмотках. Электрическая схема полученной двухобмоточной машины представлена на рис. 1-9. Рассмотренное преобразование является аналогом известной из теории электрических цепей теоремы об эквивалентном источнике тока. Можно показать, что после исключения токов статора выражение для момента также сохраняет свой вид 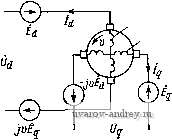 Рис. 1-9. Электрическая схема двухобмоточной машины с исключенными контурами статора iW = -i?e(/p2); (l-4) ш здесь Ва - вектор индукции, составляющие которого получаются из матричного уравнения 24/3 - Уг = О как члены, содержащие множитель о. Из уравнения (1-23) находим - Xq (/) / - jEq L xd{j)id + jEd Подставляя в (1-24) значения 1 и В^, получаем Л1 = - Re [ - jEq и + lEd fq - Xq (/) /, /<г -f Xd (/) h Iq] (1-25) Аналогично производится исключение токов ротора, и уравнение для контуров статора принимает вид Z\i = u\, (1-26) где Z, = Z-ZjZZj - матрица переходных сопротивлений статора; U\ = = t/,-ZZt/j - вектор приложенных напряжений. В качестве примера исключим токи ротора из уравнений ЭДС неявно-полюсной электрической машины с короткозамкнутым симметричным ротором, матрица сопротивлений которой определяется формулой (1-16). В этом случае D Q d q О 3 = Хт Zd + JXm О D d г / q L V Zq + iXm J Za = jx - V I J Z4 = r -j- ]x - vx r+ jx J q L vx [г + ixf - q - r + ix . -vx r + jx Подставляя эти выражения в формулы для Zj и (Уj, получаем D Q 2 r + j{l-V)x (r + jxf + vV iXmrv (r + jx) + (Г + jx) + Ц^ДГ U[ = U = Ud L ()q j 1-4. Преобразование уравнений ЭДС и момента Уравнения ЭДС и момента большинства электрических машин можно получить из уравнений ЭДС обобщенной машины путем стандартной операции-преобразования токов обобщенной машины к токам реальной машины. Это преобразование может включать в себя поворот обмоток, соединение их между собой, переход от токов в ветвях к контурным токам, переход к симметричным составляющим и т. п. Обозначим через С матрицу, определяющую преобразование токов реальной машины / к токам обобщенной электрической машины /: (1-27) Закон преобразования напряжений и матрицы сопротивлений установим из условия инвариантности мощности и =и'с или и'С'и- (1-28) Преобразуем уравнение ЭДС обобщенной машины в матричной форме V =Zl =ZCI- Умножив левую и правую части уравнения на матрицу С^, получим где Z =CZC. (1-29) Формулы (1-28) и (1-29) определяют искомый закон преобразования вектора напряжений и матрицы сопротивлений. В том случае, когда матрица С содержит комплексные числа, например при. переходе к симметричным составляющим, формулы преобразования вектора напряжений и матрицы сопротивлений имеют вид: Ь =с'(1; Z = CZC- (1-30) Совершенно аналогично преобразуется вектор индукции В и матрица момента G, которая состоит из элементов матрицы сопротивления Z, имею- щих в качестве множителя угловую скорость ротора (Ор = уш; в' = с' в; g=cgc- (1-31) Выражение для момента через новые токи сохраняет свой вид = - Ц^{В') = Re (/ G/ ). (1-32) В качестве примера рассмотрим работу репульсионного двигателя в установившемся режиме. Схемы двигателя (а) и соответствующей ему модели обобщенной машины (б) представлены на рис. 1-10. Матрица преобразования токов D Г 1 q I О О П cos а sin а   Рис. 1-10. Схема репульсионного двигателя Матрицу сопротивлений обобщенной машины получим из выражения (1-16), опустив строку и столбец, соответствующие контуру Q: D d q IXm о hm r + jx - VX VXm VX r + jX J Матрицу сопротивлений репульсионного двигателя найдем по формуле Z = Cfzc. Выполняя вычисления, получаем D г го + 1хт Z = d ZC =d 2 = CZC = + IXm fXm COS a Ixm (r -f jx) COS a - ал: sin a VXm VX COS + (/ + jx) sin a . D Г Zo + iXm jXmCOsa L - т (/COS a + a sin a) r + ix Для определения токов репульсионного двигателя найдем обратную матрицу D п (Z)-i -L + ix - jXm COS a d + iXm где Д - определитель матрицы Z. Отсюда г + jx Д n L -- тС/cos a-1-е sin a) A L - (i cos a + D sin a) итель матрицы Z. / = (Z)-W = Выражение для момента найдем по формуле (1-32), в которой G = = Хт sin а. Подставляя сюда токи /д и / , получаем } * } М = - Ке(/ л: 5ша/о) = - со со ирХт (/ COS а - а sin а) X Хт sin а {г + 1х)ир 1 D4sin a А J cuJAp Таким образом, окончательно имеем Re [ (/ COS а - а sin а) (г -f jx) ]. U\,xl,sma М =--(л: cos а + sin а). со \\ Знак минус означает, что для положения щеток, указанного на рис. 1-10, а, момент двигателя направлен в сторону, противоположную принятому направлению вращения ротора. 1-5. Неявнололюсная четырехобмоточная электрическая машина с малой асимметрией магнитопровода Погрешности высокоточных электрических микромашин: вращающихся трансформаторов, сельсинов, асинхронных тахогенераторов, двухфазных управляемых двигателей и др.- существенно зависит от асимметрии магнитопровода, появляющейся от неточности изготовления машины. Для приближенной количественной оценки этой зависимости рассмотрим электромагнитные соотношения в машине с асимметричным магнитопроводом при условии, что асимметрия невелика. Физическая модель машины. В симметричной идеализированной неявнополюсной машине магнитная проводимость Х^, соответствующая воздушному зазору и магнитопроводам статора и ротора, постоянна и не зависит от выбора оси, вдоль которой она определяется. В несимметричной машине, имеющей неравномерный зазор, короткозамкнутые витки в магнито-проводе, асимметрию в магнитных свойствах пакетов и т. п., магнитная проводимость X не остается постоянной. При малой асимметрии ее можно представить в виде где ДА, - относительное изменение магнитной проводимости, обусловленное малой асимметрией, которое зависит от выбора направления НС обмотки. Введем для машины систему координат d к q, совпадающую с осями обмоток статора, и определим магнитные проводимости по этим осям и i.q при наличии произвольной, но малой асимметрии магнитопровода (рис. 1-11). Положим, что по оси d действует НС Fd= I А; создаваемый ею магнитный поток представим в виде Ф = Ф<г + A<i>d + dq, где - магнитный поток симметричной машины; Аф и Аф,- добавочные магнитные потоки, появляющиеси по осям d н q вследствие магнитной асимметрии. Соответственно магнитную проводимость по оси d можно представить в виде id = /Fd=-h(.l + d + df), (1-33) где ДХ. - относительное изменение магнитной проводимости по оси d; 32 д^ относительное изменение магнитной проводимости взаимной индук- цим'd к q из-за асимметрии магнитопровода. нитная проводимость по оси q Аналогично определяется маг- К = ф/f = (1 + д + AXqd): (1-34) очевидно, что А \dq = \d- Сформулируем основные допущения для физической модели неявнополюсной электрической машины с малой асимметрией магнитопровода; 1) магнитные свойства магнитопровода характеризуются проводимостью симметричной машины и относительными изменениями комплексных магнитных проводимостей А id, А Я. А %dq, зависящими от асимметрии магнитопровода, выбора реей d к q к угла поворота ротора; 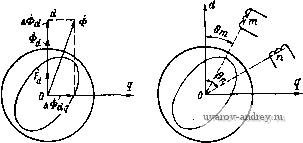 Рис. 1-11. Магнитные по- Рис. 1-12. Электрическая схе- токи в электрической ма- ма асимметричной машины шине при асимметрии с произвольно расположен-магнитопровода ными обмотками статора 2) на статоре и роторе машины расположены две взаимно перпендикулярные, синусоидально распределенные обмотки; 3) параметры обмоток постоянны и не зависят от углового положения ротора; 4) все приложенные напряжения и токи являются синусоидальными функциями времени; это позволяет все величины, характеризующие электромагнитные процессы, изображать в виде комплексных величин. Матрица иидуктивиостей. Определим комплексную взаимную нндук-тивность двух произвольных обмоток тип, составляющие углы 9 и 9 с осью d (рис. 1-12). Пусть по обмотке п протекает ток 1 А; тогда составляющие НС, магнитных потоков и потокосцеплений по осям dn q с учетом формул (1-33) и (1-34) можно записать в виде: По оси d Fn - -Wn cos 9 .Xe[(l-f A!.<i)cos9 -f + AXdq sin 9 ] Wn . .XoWmWn[0 + d)X X cos 9 cos 9m + A\dq sin 9 cos Qm] 2 Заказ Ni 678 По оси q WnSin 9 [(H-A)sin9 + -f Aiq cos 9 ] w hWmWn [(l + iq)X X sin 9 sin 9m -f Akdq cos 9 sin Bm] Отсюда ч1аходим комплексную взаимную индуктивность обмоток тип. im = io [ (1 + А id) cos 9 cos 9 -f (1 + А д) sin е„ sin9 + +.AXd sin(e + 9 )], (1-35) где Lg = AgWmWn. Эта формула позволяет записать матрицу взаимных индуктивностей при любом расположении обмоток на статоре и роторе по отношению к осям d ц q. Наиболее простой вид матрица взаимных индуктивностей имеет для машины, обмотки которой на статоре и роторе совпадают с осями d и q: Z. = Le (1-36) Уравнения ЭДС, матрицы сопротивлений и проводимостей. Будем считать, что собственные параметры вторичных обмоток одинаковы, а токи и напряжения их приведены к осям D и Q. Уравнение ЭДС при неподвижном роторе запишем в виде (Ze-f AZ)/ = i/, (1-37) где векторы тока и приложенного напряжения
Yq = iQ? - безразмерные параметры об. моток D и Q; Va = llLi безразмерный параметр обмотки ротора (якоря). здесь vo = ±i; AZ = jXm
- добавочная матрица сопротивлений, появляющаяся вследствие электромагнитной асимметрии магнитопровода и обмоток. Решение уравнения (1-37) найдем н приближенном виде / = /o-fA/, (1-38) где = ZU - ток идеализированной симметричной машины. Подставляя выражение (1-38) в уравнение (1-37), получаем (пренебрегая произведением AZAI) ZqAI + AZZU = 0; А/= -ZAZZ-Ю = AYU. AY= - ZTTAZZZ (1-39) Матрица ZoAZZ\ (1-40) может быть названа матрицей проводимости для определения изменений токов в асимметричной машине по сравнению с соответствующими токами в идеализированной машине. Матрица проводимостей идеализированной симметричной машины имеет вид 0 - D 1+Уа О О Q О 1+Ya О YaO О Я О 1+yo УаЬ О О 1+y(? где YflO = Ya + YO + YaYo: YaQ = Ya + Y + YoYq- По формуле (1-40) находим матрицу АК =--- X YaoYaQ YgYp Yd VaYQ YaoVflQ AXde Aide - AYd? YaYQ Л2 AX, YaQ VgYg YaoVaQ yL ydyq - Aidg -Akdg - Aktla VaoYaQ YaQ -Akdg A. УаЯ (1-41) 35 с ввод исходных данных (чисел) Подготовка массива, под матрицу сопротивлений Приведенные выражения позволяют по известным относительным нз-мененням магнитных проводимостей определить токи и ЭДС, появляющиеся в контурах асимметричной машины, и оценить таким образом технологические погрешности, а также связь между различными величинами, характеризующими эти погрешности. Более подробно этот вопрос рассмотрен в § 9-8 для двухполюсных вращающихся трансформаторов. 1-6. Анализ обобщенной электрической машины переменного тока с помощью ЦВМ Точность результатов исследования определяется рядом факторов: совершенством физической модели (основными допущениями), объективностью и достоверностью исходных данных, возможностями применяемого математического аппарата и т. д. Уточиеиие физической модели, как правило, приводит к услвжнеиию математической теории (модели) изучаемого объекта или явления. Матричное представление уравнений электрических машин являетея весьма эффективным средством для анализа их характеристик. Однако с увеличением числа рассматриваемых контуров электрической машины или системы машин резко возрастает трудоемкость решений. Если при записи уравнений желательно учесть все лектрические параметры или некоторую асимметрию машины, то решение в общем виде усложняется еще больше. Наличие комплексных величин в исходных уравнениях обусловливает комплексный характер получаемых выражений, что ухудшает их обозримость и физическую интерпретацию. Из вышесказанного следует вывод о целесообразности поиска иных методов анализа характеристик электрических машии. Одним из таких методов является численный анализ с примеиеиием ЦВМ. Современные вычислительные машины обеспечены большим набором стандартных программ для решения наиболее типичных задач. К таковым относится решение систем вл-гебраических уравнений с действительными коэффициентами (есть стандартные программы для решении систем линейных уравнений 20-го, 50-го и более высокого порядка). Алгоритмический (входной) язык альфа-системы содержит описание действий над комплексными числами и позволяет программировать решение комплексных матричных уравнений, что очень важно для задач электромеханики. Рассмотрим методику численного анализа с применением ЦВМ иа примере следующей задачи: определить зависимость механических характеристик, потребляемой мощности и мощности на валу обовщениой электриче-  Вычисление эшенипв изапшение матриц Расчет токод Расчет М, Р., и Pi, как функций vur Заполнение и вывод на печать массива результатов Конеи, решения Рис. 1-13. Алгоритм расчета ской машины, уравнение которой имеет вид
Uq 0 (1-42) L 0 J от активного сопротивления ротора г. Формулы для вычисления момента М, потребляемой мощности Pi и мощности на валу Pj известны, а именно М / * * * * \ Re \ - Xmqidig - XqIdlq -V XmdlqID + xjlqld); Pi= ReilDUD + IqUQ); P2=M(0cV, (1-43) где (Dg = 2nfjp; fi - частота питающего напряжения; p - числе пар по-люсов; V - относительная скорость ротора (в долих синхронной Юс)- 1. Уточнение условий задачи и исходных данных. Для решения аадач* численным методом необходимо все величины и коэффициенты в фуиквдо-иальных зависимостях, входящих в математическую модель, выразить через исходные даииые. Аиалиа зависимостей Л1, Pi и Pj от и и г будем проводить при известных электрических параметрах машины и определенных напряжениях Ud и Uq, т. е. численные значения сопротивлений контуров машины и иапряженнй должны задаваться как исходные данные. Переменные V и г задаются минимальным значением, максимальным и шагом изменения. 2. Выбор численного метода. Значения М, Pi и Рг могут быть вычислены по формулам (1-43), если определить токи из уравнения (1-42). В альфа-системе предусмотрена стандартная программа для вычисления детерминанта матрицы с комплексными элементами. Поэтому токи /д, Iq, Id Iq наиболее просто находить с помощью детерминантов соответствующих матриц. 3. Алгоритм решения удобно представить в виде схемы (рнс. 1-13). Главв вторая АНАЛИЗ ДВУХФАЗНЫХ МАШИН МЕТОДОМ СИММЕТРИЧНЫХ СОСТАВЛЯЮЩИХ 2-1. Образование вращающегося магнитного поля в двухфазной машине Рассмотрим неявнополюсную электрическую машину, на статоре которой расположены Две обмотки (фазы), оси которых сдвинуты на угол а (рис. 2-1). Положим, что магнитное поле, создавае- мое каждой из обмоток, имеет синусоидальное распределение в воздушном зазоре, а токи в обмотках сдвинуты по фазе на некоторый угол р. Выражения для индукции магнитного поля фаз D и и запишем в виде Jd = BDmsin(pcos(o<; Вп = Влт sin (ф -1- а) cos {Ы + р), где ф - угол по расточке машины, отс итываемый от линии, перпендикулярной оси фазы D. Разложим пульсирующие поля Bp и Вп на два, бегущих в противоположные стороны. Во= Ват sin (ф- Ы) + + - Вот sin (ф-f ©0; Вп = - Впш sin (ф- (о< + а-р) +  Рис. 2-1. Щеявиаполюс-иаи электрическая ма-ш'йиа с йеперпеидику-ляриымй обмотками ста- тора + -В т8т(ф + (о/ + а+р) И сложим поля, вращающиеся в одном направлении: B-.Bд + B = Bf sin(ф-ю^-у) + Вбт8т(ф + (о/ + 8), (2-1) 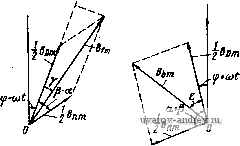 Рис. 2-2. Векторные диаграммы для определения Bf и Bj где индексом / обозначена индукция поля, вращакмцегося в прямом направлении (против часовой стрелки), а индексом b - индукция поля, вращающегося в обратном направлении. Значения В^ , Bj , у и г находим из векторных диаграмм, изображенных на рис. 2-2: Bfm = ~ [Вот + BL + 2ВотВ COS ф-о)] : (2-2) Вьт = [Вк + BL + 2Bd B cos Ф + a)f; (2-3) tgv = Bnm sin (Р -а) В Dm + Впт cos ф -a) ; tge = g sin(P + a) Bcm-f B mCOS(p-f a) (2-4) Таким образом, в общем случае при произвольных значениях В Dm, В„т, а и р магнитное поле двухфазной машины состоит из двух полей, вращающихся в противоположные стороны со скоростью (О = dff/dt. Магнитное поле в воздушном зазоре будет круговым, если Bjm = О- Из формулы (2-3) находим условия получения кругового поля Вот^Впт) а + р:=я. (2-5) Максимальная индукция прямого кругового магнитного поля при этом Bfm = 4- BDmK2[l + cos(p-a)] = ВдcqS . угол у определяется формулой tgV:= Sin(P- ) 1 -f COS (Р - а) Подставляя сюда значение р из (2-5), находим B/m = BomSina; tgyctga. (2-6) Для двухфазных машин со взаимно перпендикулярными обмотками Ь и Q для получения кругового магнитного поля необходимо BDmBprn, Р = а=л/2. (2-6а) При этом Bfm = Вот; Y = 0. Если условия (2-5) не выполняются, то конец результирующего вектора индукции магнитного поля описывает эллипс. Действительно, совместим с осью фазы п ось у декартовой системы координат Oyz (рис. 2-3); тогда By = Впт cos (<о^-Р) -f Вот COS а cos at = В'пт COS {at- у'); Вг = Вот sin а COS at = В'от COS at, где у'- некоторый угол. Полученные уравнения представляют собой известные из курса математики уравнения эллипса в параметрической форме. Следовательно, в общем случае при любых значениях а и Р магнитное поле электрической машины является эллиптическим вращающимся магнитным полем и только в частных случаях, указанных выше, оно превращается в круговое вращающееся магнитное поле. Очевидно, что спраьедлйЁо й обратное утверждение: эллиптическое магнитное поле можно разложить на два круговых магнитных поля, вращающихся в противоположные стороны. Совместим оси координат с главными осями эллипса (рис. 2-4). Построим две окружности с радиусами, равными полусумме и полуразности полуосей эллипса В 1т В (2-7) 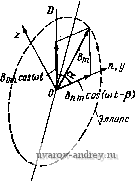 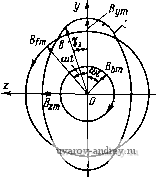 Рис. 2-3. Эллиптическое Рис. 2-4. Представление эл-магнитное поле липтического магнитного поля в виде двух круговых, вращающихся в противоположные стороны полей Положим, что вектор В^ вращается против часовой стрелки и является прямым круговым вращающимся полем, а вектор В^т вращается по часовой стрелке и является обратным круговым вращающимся полем. Уравнения этих полей запишем в виде уравнений окружностей в параметрической форме: для прямого поля % = 5/т COS ю/; fifz = flfm sin (0; для обратного поля ьг/ = Ып cos (- (dt) = Вьт COS (o/; fl42 = flbmSin(-{О0= -fifcmSin (nt. Составляющие суммарного поля будут 5J/ = 5f+ fifcj, = (5/m + flfcm ) COS (о/; = flf г +Вьг= {Bfm - fifcm) Sio Uyt. Исключая отсюда время, получим уравнение эллипса в координатах yz = 1. (2-8) (В,т + Вьш? (Bfm-Bbmf Т. е. дйа круговых вращающихся поля эквивалентны эллиптическому вращающемуся полю. В заключение найдем угловую скорость вектора индукции эллиптического магнитного поля. Из рис. 2-4 определяем угол Уэ, образуемый вектором В и осью у: (Вfm + Вьт) cos Ы эллиптичности магнитного где = - - коэффициент Bfm + Вьт поля. Отсюда V3 = arctg(*3tg (at) dt l+lii t(ot cosat Выполняя элементарные тригонометрические преобразования, получаем l (l ;)sin2u)< (2-9) Из формулы (2-9) следует, что угловая скорость вектора индукции эллиптического магнитного поля является переменной и изменяется от минимального значения эю (при со = О и 180°) до максимального (о/кз (при = 90 и 270°). 2-2. Метод симметричных составляющих Для анализа несимметричных режимов электрических машин переменного тока широко применяется метод симметричных составляющих, при котором токи и НС в машине заменяются двумя системами токов и НС прямой и обратной последовательности, образующими круговые магнитные поля с противоположными направлениями вращения. Рассмотрим сущность этого метода применительно к двухфазной неявнополюсной машине с взаимно перпендикулярными обмотками D и Q и симметричным короткозамкнутым ротором (рис. 2-5). Пусть Fo Pq - комплексные НС этих обмоток. Представим эти в общем случае неравные векторы, сдвинутые по фазе на произвольный угол р, каждый в виде суммы двух одинаковых векторов, сдвинутых на 90° (рис. 2-6, а): FDFof + Fpf,; FQ = FQf+F(b при этом Вектори Fof и Fq; образуют поле, вращающееся против часовой стрелки; они называются составляющими НС прямой последовательности. Векторы Fob и Fq образуют поле, вращающееся по часовой стрелке, и называются составляющими НС обратной последовательности. Обозначая для краткости Fof = Ff и Роь = /ь, приведенные выше выражения записываем в виде Fo = F, + F,; FQ = j{Ff-F,). О Рис. 2-5. Электрическая схема двухфазной неявно, полюсной машины с короткозамкнутым ротором р Рр + JFq 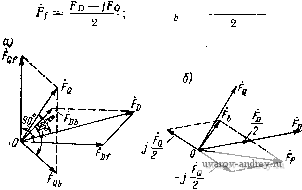 Рис. 2-6. Несимметричная система НС (а) и ее симметричные составляющие (б) Векторы Ff и f J НС прямой и обратной последовательности легко могут быть получены графически, как это указано на рис. 2-6, 6: Аналогичные соотношения могут быть получены для токов. Считая параметры обмоток и токи приведенными к фазе D, имеем tf- 2 . h---- Уравнения напряжений для фаз D и Q .запишем в виде и D = Zofl Df + Zobf Dt QQflQf + ZQblQb- (2-10) (2-11) Здесь Zof, Zob и Zqf, Zqj, - сопротивления фаз D и Q соответственно для симметричных токов прямой и обратной последовательности. Они определяются по обычным схемам замещения симметричной индукционной машины (рис. 2-7). Заменяя lof на /f, 1оь naif .!of на jlf и Iq на - /Д, уравнения (2-11) записываем в виде Dfif+Dbh - Di -ZQfif+ZQJ.jUQ. mri 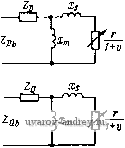 Рис. 2-7. Схемы замещения для определения сопротивлений прямой и обратной последовательности обмоток D и Q Решая их относительно токов If и находим / == Qb D iDbOQ . DfQb -f ZobQf J ZQfUp -f jZpfUQ ZoJQb -{-DbQb (2-12) Электромагнитный момент машины найдем как разность моментов, создаваемых токами прямой и обратной последовательности- М = М,-Мь.= -(Рщ-Рэь), 12-13) где Paf, Рэь - мощности, выделяемые в сопротивлениях -j- на схемах замещения при прохождении токов прямой и об- ратной последовательности в контурах ротора. Их можно получить как произведение квадрата тока прямой или обратной последовательности и соответствующего активного сопротивления разветвления схемы замещения: P,f = 2lVf; Рэь = 211г'ь; r/ = Re- Гб = Ке + ЦХт +Xs) 1-t) 1 +tl Подставив в формулу (2-13), получим М = iff П-Пгь). В частном случае, когда ротор машины неподвижен {v Tf =Гь = Ке If-ll = ±l{l-ji){l + jf)-{i+jl){!-jl\)]=. = (/о4-/d/q) = m (/d/q) = IdIq sin p (где p - фазовый сдвиг между токами в обмотках D и Q), найдем выражение для пускового момента =-Лк- sin р. (2-14) Выражения токов (2-12), найденные методом симметричных составляющих, можно получить из уравнений ЭДС обобщенной машины в осях dug, имеющей матрицу сопротивлений Z (1-16), если paccMaTpneaTj. переход к симметричным составляющим как преобразование координат. Действительно, из выражений (2-10) находим ioif + h /q-]( -/ь)- Аналогичные соотношения запишем для контуров ротора. Тогда матрица преобразования токов примет вид Для того чтобы отличать токи прямой и обратной последовательности статора и ротора, им присвоены индексы с и р . Согласно общим законам преобразования координат получим уравнения ЭДС в осях fc, be, /р, bpi
2 fee fp bp /с ZD + ixm+- Zd + JXm + - 0 /;cm(l-ft>) h iXm r-hix(i- V) ixm 0 r+ix(l+v)
Ud -JUq Ud + JUq где Z = Zq-Zd, X= Xm+ Xs. Разделив 1-е и 2-е уравнения на 2, а 3-е и 4-е - соответственно на 2 (1 -и) и на 2 (1 -f v), находим be fp Zd + JXm + jXm 0 Zd -f /дст -f + ix
+ix (2-15) Этим уравнениям соответствует схема замещения, изображенная на рис. 2-8. Заменяя параллельные цепи ротора на рис. 2-8 эквивалентными сопротивлениями и обозначая , ZDf - Zd-V - сопротивление прямой последов атель- \Хт \\xs Л- ности фазы D; Zob = Zo ----сопротивление обратной l-bt- последовательности фазы, получим более простую схему замещения асинхронной машины (рис. 2-9). Этой схеме соответствует система уравнений fc ZDf+- ZDb + -
Ud-JUq Ud + JUq 1 2 3 4 5 ... 18 turistvel.ru |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |