


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 ... 15 16 17 18 Датчики такого типа иногда называют следящими трансформаторами. Они, в частности, применяются для определения углового положения шарового гироскопа, на котором в этом случае предусмотрен специальный выступ - грибок . На рис. 12-14 приведена принципиальная схема однокоординатного датчика нормального исполнения. Статор датчика представляет собой Ш-образный магиитопровод, на среднем стержне которого расположена обмотка возбуждения; на двух крайних стержнях размещены две одинаковые встречно включенные выходные обмотки. Ротор датчика выполнен в виде магни-топроводящего сегмента без обмоток. Магнитный поток, создаваемый обмоткой возбуждения, = -f Ф. индуцирует в каждой выходной обмотке ЭДС, пропорциональную магнитному потоку Ф^ или Фа, который, в свою очередь, пропорционален магнитной проводимости воздушного зазора под крайними стержнями Ш-образного магнитопровода. При симметричном расположении ротора относительно статора Ф1=Ф2 = ф,/2, ЭДС в выходных обмотках равны между собой и электрический сигнал на выходе датчика, представляющий собой разность этих ЭДС, теоретически равен нулю. Такое положение ротора называется нулевым. Практически ЭДС на выходе датчика в нулевом положении равна не нулю, а некоторой ЭДС, называемой остаточной ЭДС датчика. Она состоит из ЭДС основной частоты, сдвинутой по фазе относительно полезного сигнала на 90°, и высших временных гармоник. Основными причинами возникновения остаточной ЭДС являются: магнитная несимметрия магнитопровода датчика, образование короткозамкнутых витков в обмотках и вихревых токов в сплошном роторе. Остаточная ЭДС основной частоты может быть уменьшена симметрированием выходных обмоток путем включения сопротивлений или внешнего компенсирующего устройства. При отклонении ротора датчика на некоторое расстояние Ах от нулевого положения влево или вправо происходит перераспределение 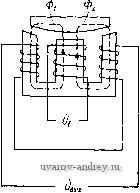 Рис. 12-14. Индукционный датчик угла типа следящий трансформатор потоков Фх и Ф,: + АФ; 2 2 где АФ = BlAx (здесь В - индукция в воздушном зазоре, / - длина пакета магнитопровода). ЭДС в выходной обмотке датчика будет = 4,44/а; (Ф^-Ф^) = 8,88/шВ;Ал;, где W - число витков выходной обмотки. 346 12-4. Шкросины Микросин представляет собой электрическую машину с явно-выраженными полюсами, которая может выполнять функции как датчика угла, так и датчика момента. Принципиальная схема мик-росина для работы в режиме датчика угла приведена на рис. 12-15. На каждом полюсе статора размещены по две катушки, которые при последовательном соединении образуют две обмотки: возбуждения и сигнальную. Катушки соединяются таким образом, что при положении оси полюсов ротора под углом 45° к оси полюсов статора ЭДС, индуцируемая в сигнальной обмотке, равна нулю. При повороте ротора микросина в ту или иную сторону на угол а магнитные потоки под полюсами изменяются и в сигнальной обмотке появляется ЭДС, пропорциональная углу поворота ротора. Микросин можно рассматривать как ДВухобмоТОЧ- Рис. 12-15. Микросин в ре- ный трансформатор, у которого взаимная жиме датчика угла индуктивность обмоток в нулевом положении равна нулю и изменяется пропорционально относительному * где X - линейное смещение края 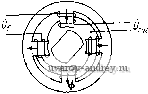 смещению ротора а^- - , &п/2 полюса ротора, а Ьп - ширина полюса. Уравнения ЭДС такого трансформатора имеют вид iZf + jxo)if+jXoKaJcHr = Uf; УХоКа^/,-Ь(/>оК + сиг + 2 )/с„г = 0, 1 где Хо - сопротивление взаимной индукции обмотки возбуждения; Zf, ZcHr - собственные сопротивления обмоток возбуждения и сигнальной; Zh - сопротивление нагрузки; К = - коэффициент трансформации. Решая уравнения (12-21), найдем выражения для напряжения на нагрузке и для тока, потребляемого обмоткой возбуждения: сиг ) 2 ixo Uf Zf + jxo + jXoK + ZcHr + 2h Полагая Z == oo, найдем ЭДС сигнальной обмотки (12-22) l+Zfl(jXo) (12-23) ,opoS ° ритора можно выразить через угол поворота где D - диаметр ротора. Тогда из формулы (12-23) находим крутизну ЭДС сигнальной обмотки a=o \l+Zf/Uxo)\ b 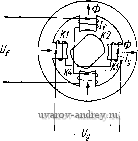 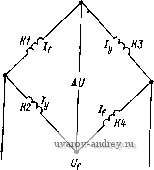 Рис. 12-16. Микросин в режиме датчика момента Рис. 12-17. Мостовая схема включения обмоток ми-кросииа Микросин, работающий в режиме датчика момента, имеет четыре катушки Ki, Ki, Ks, Ki, соединенные по схеме, приведенной на рис. 12-16. Когда один и тот же микросин работает в режимах датчика угла и датчика момента, то роль катушек ДМ выполняет обмотка возбуждения. Момент, развиваемый микросином, пропорционален квадрату токов в катушках и /у и в широком диапазоне изменения угла не зависит от углового положения ротора. Для ненасыщенной магнитной цепи момент может быть подсчитан по формуле M = l -f-и>(/f /y). (12-24) где /? - радиус ротора микросина; / - длина ротора; б - воздушный зазор; W - число витков в катушке. Для получения линейной зависимости момента от управляющего напряжения обмотки микросин включают по мостовой схеме, как указано на рис. 12-17. В этом случае при питании обмоток постоянным током можно принять If = Iq + Д/, 1у~ /о-А/, где /о = = Uf/{2 Гк); А/ = А{ (2 Гк); Гк - сопротивление катушки. 348 Выражение для МоМенТа примет вид (12-25) глава тринадцатая ОЦЕНКА НАДЕЖНОСТИ ЭЛЕКТРИЧЕСКИХ МИКСОМАШИН 13-1. Общие понятия Важным показателем, определяющим выбор того или иного типа электрической микромашины для автоматических систем, является надежность ее работы. Наука, изучающая закономерности отказов технических устройств в процессе их работы, называется теорией надежности. Рассмотрим основные понятия и термины теории надежности применительно к электрическим микромашинам автоматики [231. Все технические изделия в теории надежности достаточно условно делятся на два типа: элементы и системы. Элементом называется часть системы, выполняющая вполне определенные функции. Система - это совокупность совместно работающих элементов, предназначенных для выполнения определенного задания. Микроэлектродвигатель, установленный в автоматической системе, считается элементом; с другой стороны, отдельно взятый микроэлектродвигатель может рассматриваться как система, состоящая из отдельных элементов: подшипников, обмоток, контактного устройства и т. п. Технические изделия принято делить на два класса: I) восстанавливаемые (многократного действия); 2) невосстанавливаемые (однократного действия). Восстанавливаемыми называются такие изделия, которые в случае отказа их в работе могут быть отремонтированы; например, двигатель постоянного тока при износе щеток может быть восстановлен, если заменить щетки. Невосстанавливаемые изделия при отказе ремонту не подлежат, например герметичный электродвигатель, обмотка, залитая эпоксидным компаундом, и т. п. Основными состояниями, характеризующими работу изделия, являются: 1) исправность - такое состояние изделия, при котором оно соответствует всем требованиям как по основным параметрам, определяющим нормальное выполнение его фунцкий, так и по второете-пенным параметрам, характеризующим его внешний вид, удобства в эксплуатации и т. п.; 2) неисправность - состояние изделия, при котором оно не соответствует хотя бы одному из требований по основным или второстепенным параметрам; 3) работоспособность - состояние изделия, при котором оно отвечает всем требованиям по основным параметрам; 4) отказ - событие, заключающееся в полной или частичной утрате изделием работоспособности. Свойствами изделия, определяющими его работоспособность в процессе эксплуатации, являются: 1) безотказность - свойство непрерывно сохранять работоспособность в течение заданного времени; 2) долговечность - свойство сохранять работоспособность до разрушения или другого предельного состояния; 3) ремонтопригодность - приспособляемость к операциям технического обслуживания и ремонта; 4) надежность - свойство сохранять эксплуатационные показатели в заданных пределах; это обобщенное свойство изделия, обусловленное безотказностью в работе, долговечностью, ремонтопригодностью. За основные количественные показатели, характеризующие перечисленные эксплуатационные свойства изделия, принимают: 1) вероятность безотказной работы Р (t); 2) интенсивность отказов X (0; 3) частоту отказов а (t); 4) среднее время безотказной работы Т; 5) среднюю наработку на отказ ср; 6) коэффициент готовности кг; 7) коэффициент профилактики р; 8) коэффициент отказа элементов когк- Для каждого-класса изделия характерны свои количественные показатели, которые более подробно рассматриваются в следующем параграфе. 13-2. Количественные показатели надежности Вероятностью безотказной работы называется вероятность того, что при определенных условиях эксплуатации в заданном промежутке времени отказ изделия не возникает. Вероятность безотказной работы является функцией времени, характеризуемой следующими свойствами: Р (f) - убывающая функция; Р (0) = 1; Р (оо) = 0. Экспериментально вероятность безотказной работы определяют на основании статистических данных большого числа испытаний по формуле р {t) = 0 - (О (13-1) где Л^о - число изделий в начале испытаний; п (t) - число изделий, отказавших за время t. Очевидно, что величина Q {t) = п (О/Л^о = 1-Р (О является вероятностью отказа изделия за время t. Для электрических микромашин автоматики используют три закона распределения вероятностей безотказной работы их отдельных элементов: 1. Экспоненциальный закон Р(0 = е где % - интенсивность отказов. 2. Нормальный закон (13-2) (13-3) где Ф (х) - интеграл вероятностещ е du; Ti - среднее время между отказами; о - среднее квадратическое отклонение времени между отказами 3. Закон Вейбулла Pit) = e (13-4) где 0 - параметр распределения, определяющий его масштаб; к - параметр, определяющий эксцесс и асимметрию; при к = 1 закон Вейбулла переходит в экспоненциальный закон. Первому закону распределения подчиняются вероятность безотказной работы обмоток, изменения сопротивления изоляции, электроэрозия контактов, а также внезапные отказы изделий. Второй закон распределения характерен для таких причин отказа, как износ щеток; обусловливающие постепенные отказы, старение и изменение параметров машины; неточность изготовления и т. п. Третьему закону распределения подчиняются отказы подшипников качения. Интенсивностью отказов, называется вероятность отказов не-восстанавливаемого изделия за единицу времени после данного момента времени при условии, что до этого момента отказа не было. Экспериментально интенсивность отказов определяется на основе данных статических испытаний по формуле (13-5) где Ад - число отказов за время At; Ncp - среднее число изделий, исправно работающих время At. Формулу (13-5)-можно записать в дифференциальном виде 1 dtt X(t) =--. где N - число изделий, исправно работающих <и в момент,времени t. Но N = N P{t), dn dt dQ it) dt dP it) dt l{t) = - dP (t) P it) dt (13-6) 351 2a> для закона Вейбулла X (t) = оА:/*- Переходя к дифференциальной форме, получаем J-Jl dQ(tl dP(t) a{t) = (13-7) (13-8) для экспоненциального закона а(0 = Я€- ; для нормального закона а(0 = 2а> ДЛЯ закона Вейбулла 1 + ф(-Л^\1 (13-9) (13-10) a(0 = -e-V*. (,3.jj ние%ГниГказ1ГрТ^1,Р^° -ческое ожида- (13-12) где ti - время безотказной работы i-ro изделия. Запишем формулу (13-11) в интегральной форме. За время от t АО t + dt число отказавших изделий равно NdQ (О = - Л^о^ (0: время их работы равно t. Среднее время безотказной работы получим путем интегрирования этого выражения и деления его на Л^,: 1 1 О Используя формулу (13-8), находим T.= Jta{t)dt. о Для указанных выше трех законов распределения согласно формулам (13-9) - (13-11) получим: для экспоненциального закона 7 = 1/1; (13-13) для нормального закона для закона Вейбулла т- Г(Ш-Ь1) (13-14) (13-15) где Г {l/k -+- 1) - гамма-функция. Наработкой на отказ называется среднее время наработки восстанавливаемого изделия между -каждыми двумя последовательными отказами (13-16) где ti - время наработки после г-го отказа. Коэффициентом готовности изделия называется отношение времени безотказной работы tp к сумме времени безотказной работы и времени восстановления изделия t Коэффициентом профилактики называется отношение времени восстановления tg к времени безотказной работы tp knp = tjtp. (13-18) Коэффициентом отказа элементов называется отношение числа отказов изделия ( из-за отказов элементов данного типа к общему числу отказов изделия п за определенный срок k=.ni/n. (13-19) Перечисленные количественные показатели надежности применяются для оценки электрических микромашин как на стадии проектирования, так и при экспериментальных исследованиях на надежность. В настоящее время большое внимание уделяется разра- ботке методов ускоренных испытаний на надежность. В качестве ускоряющих факторов обычно принимаются превыщение температуры окружающей среды и скорости ротора двигателя. В заключение следует заметить, что не все рассмотренные показатели надежности применимы для характеристики невосста-навливаемых и восстанавливаемых изделий. В табл. 13-1 знаком плюс отмечены показатели, используемые для данного класса изделий, знаком минус - неиспользуемые (символ э указывает, что применение этого показателя возможно только при экспоненциальном законе распределения). Таблица 13-1 Применимость показателей надежности электрически микромашин
13-3. Причины и характер отказов микроэлектродвигателей В настоящее время наиболее слабыми узлами в электрических машинах, имеющими наименьшую долговечность, являются подшипники, щеточно-коллекторный узел и обмотки. Для двигателей, снабженных механическим понижающим редуктором, значительная часть отказов обусловлена неисправностью редуктора. Вероятность отказов различных элементов двигателя зависит от типа машины, ее габаритов скорости, напряжения и качества технологического процесса. В машинах очень малых габаритов, в которых применен тонкий провод, наибольшее число отказов возникает из-за обмотки; в высокоскоростных двигателях интенсивность отказов связана с работой подшипников качения, а в коллекторных машинах - щеточно-коллекторного узла. Значительное число отказов возникает в первые 10-20 ч работы; этот начальный период называется приработкой. Отказы в период приработки обусловлены скрытыми дефектами в комплектующих изделиях, ошибками, допущенными в процессе производства, недоброкачественной сборкой и т. п. На участке приработки отказы микроэлектродвигателей подчинены закону Вейбулла с параметрами k<Z\- За приработкой следует так называемый нормальный период эксплуатации, который подчиняется экспоненциальному закону распределения. О Наконец, третий период - период износа, при котором вЫход двигателя из строя вызывается износом его отдельных узлов, их старением. В этот период отказы удовлетворительно описываются нормальным законом распределения или законом Вейбулла при k=\. На рис. 13-1 приведена типичная кривая зависимости интенсивности отказов X от времени работы двигателя; из кривой усматриваются отмеченные выше три периода работы двигателя: 1 - период обкатки, 2 - время нормальной работы, 3 - период износа. Из рассмотрения кривой следует, что для повышения надежности электрические машины должны проходить обкатку, во время которой отбраковываются явно неисправные и плохо изготовленные машины. В период нормальной эксплуатации отказы в основном обусловлены влиянием на работу машины климатических (температура, влажность) и механических (вибрация, удары) факторов. Рассмотрим наиболее характерные отказы и их причины в этот период. Для обмотки это межвитковые замыкания и замыкания на корпус; снижение сопротивления изоляции; обрыв выводных концов. Основные причины этих отказов: невысокое качество меж-слойной изоляции, точечные повреждения изоляции в проводе, нетщательность заливки или пропитки, плохое качество пайки или сварки. Для подшипникового узла это заклинивание подшипника; разрушение сепаратора. Основные причины отказов: испарение смазки из подшипника, попадание в подшипник посторонних абразивных примесей, коррозия. Для щеточно-коллекторного узла это повреждение щеткодержателя; задевание коллекторных пластин за щетки; износ щеток. Основные причины отказов: плохое качество изготовления щеткодержателя и коллектора, неправильный выбор усилия пружины и т. п. Рис. 13-1. [Зависимость интенсивности отказов от времени работы двигателя список ЛИТЕРАТУРЫ 1. Адкннс Б. Общая теория электрических машин.-М.-Л.: Госэнер-гоиздат, I960.- 272 с. 2. Армейский Е. В., Фалк Г. Б. Электрические микромашины.- М.: Высшая школа, 1984.- 242 с. 3. Ахметжанов А. А. Высокоточные системы передачи угла автоматических устройств.- М.: Энергия, 1975.- 240 с. 4. Баканов М. В., Лыска В. А., Алексеев В. В. Информационные мик-ромашииы следящих и счетно-решающих систем: Вращающиеся трансформаторы, сельсины.- М.: Сов. радио, 1977.- 88 с. 5. Бертинов А. И., Варлей В. В. Электрические машины с катящимся ротором. М.: Энергия, 1969.- 200 с. 6. Борзик Ю. Г., Зайков М. А., Наннй В. П. Электродвигатели с катящимся ротором.- Киев: Техника, 1982.- 120 с. 7. Брускин Д. Э., Зороховнч А. В., Хвостон В. С. Электрические машины и микромашины.- М.: Высшаи школа, 1971.- 432 с. 8. Вольдек А. И. Электрические машины.- 3-е изд.- Л.: Энергия, 1978.- 832 с. 9. Делекторский Б. А., Мастяев Н. 3., Орлов И. Н. Проектирование гироскопических электродвигателей.- М.: Машиностроение, 1968.- 252 с, 10. Дискретный электропривод с шаговыми двигатслями/Б. А. Ивобо-теико, В. П. Рубцов, Л. А. Садовский и др.; Под ред. М. Г. Чиликииа.- М.: Энергия, 1971.- 624 с. 11. £рмолии Н. П. Электрические машины.- М.: Высшая школа. 1975.- 295 с. 12. Кааснк П. Ю. Тихоходные безредукториые микроэлектродвигатели.-Л.: Энергия, 1974,- 136 с. 13. Каасик П. Ю., Блинов И. В. Асинхронные индукторные микродвигатели устройств автоматики.- Л.: Эиергоиздат, 1982.- 152 с. 14. Каасик П. Ю., Несговорова Е. Д., Борисов А. П. Расчет управляемых короткозамкнутых микродвигателей.-Л.: Энергия, 1972.- 168 с. 15. Копылов И. П. Электромеханическое преобразование энергии.- М.: Энергия, 1973.- 400 с. 16. Коионеико Е. В. Сиихроииые реактивные машины.- М.: Энергия, 1970.- 209 с. 17. Крон Г. Применение тензорного анализа в электротехнике.- М.-Л. Госэнергоиздат, 1955.- 275 с. 18. Куцевалов В. М. Вопросы теории и расчета асинхронных машин с Массивными роторами.- М.-Л.: Энергия, 1966.- 304 с. 19. Лопухина Е. М., Сомнхина Г. С. Асинхронные микромашины с полым ротором.-М.: Энергия, 1967.- 488 с. 20. Лопухина Е. М., Сомнхина Г. С. Проектирование асинхронных микромашин с полцм ротором.-М.: Энергия, 1968.- 328 с, 21. Лопухина Е. М., Сомихииа Г. С. Расчет асинхронных микродвигателей одйофазибго и трехфазного тока.-М.: Госэнергоиздат, 1961.-312 с. 22. Микроэлектродвнгатели для систем автоматик: Технический спра-вочиик/Под ред. Э. А. Лодочникова, Ф. М. Юферова.- М.: Энергия, 1969.-- 272 с. 23. Мкртчян Д. П., Хрущев В. В. Однофазные сельсииы.- Л.: СудпроМ- гиз, 1957.- 344 с. 24. Овчинников И. Е., Лебедев Н. И. Бесконтактные двигатели постоянного тока.- Л.; Наука, 1979.- 270 с. 25. Расчет и проектирование элементов гироскопических уст-ройств/Н. Ф. Бабаева, В. М. Ефремов, И. М. Сивоконенко и др.- Л.: Машиностроение, 1967.- 480 с. 26. Свечарник Д. В. Дистаициоииые передачи.-М.-Л.: Энергия, 1966.- 480 с. 27. Совмещенные электрические машины для автоматики/Ю. М. Келим, И. П. Копылов, Д. В. Свечариик, Л. X. Шидлович.-М.: Энергия, 1969.- 200 с. 28. Соколов М. М., Сорокин Л. К. Электропривод с линейными асии-хроииыми двигателями.- М.: Энергия, 1974.- 136 с 29. Тун А. Н. Тахогенераторы для систем управления электроприводами,-М.-Л.: Энергия, 1966.- 112 с. 30. Хенкок Е. Матричный анализ электрических машии.-М.: Энергия, 1967.-224 с. 31. Хрущев В. В. Электрические микромашины автоматических устройств: Учебное пособие для вузов.-Л.: Энергия, 1976.- 384 с. 32. Хрущен В. В. Электрические микромашииы переменного тока дли устройств автоматики.-Л.: Энергия, 1969.- 288 с. 33. Цифровые системы управления электродвигателями/А. А. Батов-рии, П. Г. Дашевский, В. Д. Лебедев и др.- Л.: Энергия, 1977.- 256 с. 34. Чечет Ю. С. Электрические микромашины автоматических устройств.- М.-Л.: Энергия, 1964.- 424 с. 35. Юферов Ф. М. Электрические двигатели автоматических устройств.- М,-Л.: Госэнергоиздат, 1959.- 224 с. 36. Юферов Ф. М. Электрические машины автоматических устройств.- М.: Высшая школа, 1976.- 412 с. 37. Электрические машины малой мощиости/Д. А. Завалишии, С. М. Бар-дииский, О. Б. Певзиер, Б. В. Фролов, В. В. Хрущев.-М.-Л.: Госэнергоиздат, 1963.- 432 с. ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ Алгоритм решения 36 Альфа-система 36 Асимметричная машина 32 Асимметрия нулевых точек ВТ 243, 259 Бегун 78 Безотказность 350 Вектор индукции 23, 29 - напряжения 22 - напряженности 16, 103 - потокосцепления 23 Векторная диаграмма ТА 173 --двигателя гистерезисного 104 --- конденсаторного 61 ---однофазного 59,60 --- реактивного 95 --- синхронного 87, 90 ---с экранированным полюсом -- сельсина 207 Вероятность 350 Внешний магиитопровод 171 Внутренний магиитопровод 171 Вращающийся трансформатор 233 --линейный 245 --преобразователь 248 -- с компенсацией 278 Вход в синхронизм 91, 99, 113 Гармоника зубцовая НО Датчик момента 337 - - асинхронный 338 --постоянного тока 341 - положения 137, 158 - дроссельный 159 - трансформаторный 160 -- угла 342 Двигатель асинхронный 49 -- двухфазный 53 --конденсаторный 61 --однофазный 55, 56 --с беличьей клеткой 286 - - с полым ротором 287 - бесконтактный постоянного тока 136 --- - двухсекционный 138 ----трехсекционный 140 ----четырехсекционный 140 - коллекторный 124 - - постоянного тока 124 -- с гладким якорем 305 ---с дисковым якорем 126 --с полым якорем 301 ---с постоянным магнитом 126 --с электромагнитным возбуждением 125 - синхронный 83 --гистерезисиый 99 -- волновой 122 --- реактивный 93 - - с катящимся ротором 117 --с осевым возбуждением 110 --с радиальным возбуждением 111 - Субсинхронный 108 - с пусковой емкостью 59 - с пусковым сопротивлением 56 - управляемый 282 -- двухфазный асинхронный 284 -- индукторный 81 --шаговый 315 Демпфер механический 220 - электромагнитный 220 Демпферный контур 209 Добротность пуска 52 Долговечность 350 Закон распределения Вейбулла 351 -- нормальный 351 --экспоненциальный 351 Зона динамической устойчивости 320 - равных потерь 64 - статической устойчивости 320 - фазная 119 Импульс тока 153 Индуктосин 270 Индукция магнитного поля 16 - остаточного намагничивания 103 Интенсивность отказов 351 Исключение неизвестных токов 27 Классификация микромашин гиро- приборов 8 - двигателей 7 - микромашин автоматики- 9 Классы точности ВТ 243 --сельсинов индикаторных 222 ---трансформаторных 229 Коэрцитивная сила 103 Коэффициент воздушного зазора ПО - выпуклости петли 103 - готовности 353 - демпфирования 220, 290 *- заполнения паза 300 - мощности 10, 52 - обмоточный 57, 145, 300 - отказа 350 - передачи по напряжению 238 - полезного действия 10, 52, 84 - профилактики 353 - редукции 111, 282 - скоса паза 145, 276 - трансформации 238 - укорочения обмотки 145 - управления по моменту 288 -- по скорости 292 --по ускорению 292 - усиления 190, 278 - форсировки 321 - эллиптичности 41 Кратность максимального момента 52 - пускового момента 52 - тока 52 Крутизна механической характеристики 290 - ЭДС тахогенератора 188 - ЭДС управляющей 203, 252 Магнесин 229 Магнитная индукция 16 - проводимость 20 - проницаемость 103 --комплексная 103 Магнитное поле бегущее 38 -- круговое 39 --пульсирующее 38 --эллиптическое 40 Магнитный поток основной 15 --- рассеяния 15 Матрица индуктивностей 20 - момента 23 - преобразования 30 - сопротивления 22 Метод вращающихся полей 37 - симметричных составляющих 41 Микросин 347 Момент асинхронный 54, 56, 97 - входа в синхронизм 84 - выхода из синхронизма 84 - демпферный 220 - инерции 91, 115 - на ватт потребляемой мощности - синхронизирующий 201, 213 - синхронный 88 - тормозной 90 - удельный 202, 213 Мощность активная 23 - механическая 23 - полная 23 - реактивная 68 - электромагнитная 64, 145 Намагничивающая сила 16 Напряжение возбуждения 173, 238 - трогания 291 - управления 285 Напряженность магнитного поля 16, 103 Обмотка возбуждения 170, 198 - вспомогательная 50, 56 - генераторная 170 - квадратурная 237 - концентрическая 259 - косинусная 237 - основная 57 - поперечная 17 - продольная 17 - синусная 237 - синхронизации 198 Обобщенная машина 17 Ось поперечная 19 - продольная 19 Отказ 350 Погрешность амплитудная 181, 243 - ТА 180 -- скоростная 181 --Температурная 185 -- частотная 186 - динамическая 222 - скоростная 226 - статическая 222, 227 - фазовая 181 Погрешности ВТ 252 --дополнительные 253 -- конструктивные 256 -- принципиальные 253 --технологические 257 -- функциональные 255 Полупроводниковый коммутатор 162 Постоянная времени электромагнитная 130, 321 --электромеханическая 130, 292 Прямая возврата 93 Пуск двигателя 58, 89, 96 ИЗ Работоспособность 350 Реакция коммутационных токов 194 - якоря 194 Редуктосин 266 Ремонтоспособность 350 Ротор беличья клетка 286 - гистерезисный 100 --с магнитной втулкой 102 -- с немагнитной втулкой 102 - полый немагнитный 287 - цостояивый магнит 85 - реактивного двигателя 94 - ферромагнитный омедненный 266, 338 Самоход параметрический 288 - технологический 288 Симметрирование вторичное 241 - первичное 241 Синхронная передача индикаторная 198 --на ВТ 250 - - на индуктосинах 272 -- иа магнесинах 229 -- на сельсинах 204 - - с дифференциальным сельсином 216 --трансформаторная 233 Скольжение 53 Скорость линейная 79 - относительная 24 - угловая 23 Сопротивление активное 22 - емкостное 59 - индуктивное 24 - обратной последовательности 43 - по поперечной оси 28 - по продольной оси 28 - прямой последовательности 43 - удельное 300 Степень возбуждения 89 - нелинейности 338 Тахогенераторы асинхронные 170 - демпфирующие 168 - измерители скорости 170 - индукторные 197 - постоянного тока 192 - синхронные 196 - счетно-решающие 169 Теория двух реакций 17 Ток нагрузочный 130 - номинальный 52 - пусковой 52 - холостого хода 129 Трансформаторы вращающиеся 233 - многополюсные 235, 261 Угол потерь в стали 103 - рассогласования 204 - фазовый 38 Управление двигателем двухфазным асинхронным 284 - --- амплитудное 285 ---- амплитудно-фазовое 285 ----пространственным смещением 311 ----фазовое 285 Управление двигателем постоянного тока 301 ..- полюсное 304 якорное 303 Управляемые двигатели двухфазные асинхронные 284 ----, конструктивная схема -----, механические характеристики 289, 295 ----, регулировочные характеристики 290 ----, схема замещения 298 ---- , схема электрическая Управляемые двигатели постоянного тока 301 ---~ , конструкции 301, 308 ----, механические характеристики 303, 305 -----, передаточные функции 303, 307 ----, регулировочные характеристики 304 ----, электрические схемы 302, 305 Фаза вспомогательная 50 - основная 50 Фазовращатель двухфазный 249 - однофазный 249 Формула Клосса 55 - момента однофазного двигателя 55 - удельного момента 208, 213 - ЭДС AT 174, 177 Характеристики механические 154, 289, 303 - пусковые 90 - рабочие 52 - регулировочные 154 Частота отказов 352 Шаг двигателя механический 319 ЭДС вращения 21 - квадратурная 244 - остаточная 243 - трансформаторная 21 Эксцентриситет 228 Элемент 349 Якорь гладкий 305 - дисковый 126 - полый 301 ОГЛАВЛЕНИЕ Предисловие ........................... 3 Основные обозначения...................... 4 Введение............................ 6 В-1. Области применения и классификация электрических машин малой мощности..................... - В-2. Величины, характеризующие электрические машины малой мощности ......................10 В-3. Методы теоретического исследования электрических микромашин переменного тока .................. П В-4. Некоторые общие свойства электрических машин......12 ЧАСТЬ ПЕРВАЯ ОБЩИЕ ВОПРОСЫ ТЕОРИИ ДВУХФАЗНЫХ МАШИН Глава первая. ОСНОВЫ ТЕОРИИ ДВУХ РЕАКЦИЙ........17 1-1. Физическая модель обобщенной электрической машины . . . - 1-2. Уравнения ЭДС и момента в осях d п q . .......... 21 1-3. Исключение неизвестных токов из уравнений ЭДС...... 27 1-4. Преобразование уравнений ЭДС и момента......... 30 1-5. Неявнополюсная четырехобмоточная электрическая машина с малой асимметрией магнитопровода............ 32 1-6. Анализ обобщенной электрической машины переменного тока с помощью ЦВМ..................... 36 Глава вторая. АНАЛИЗ ДВУХФАЗНЫХ МАШИН МЕТОДОМ СИММЕТРИЧНЫХ СОСТАВЛЯЮЩИХ............37 2-1. Образование вращающегося магнитного поля в двухфазной машине.......................... 2-2. Метод симметричных составляющих............41 ЧАСТЬ ВТОРАЯ ЭЛЕКТРОДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ ОБЩЕГО ПРИМЕНЕНИЯ Глава третья. АСИНХРОННЫЕ ДВИГАТЕЛИ...........49 3-1. Основные типы асинхронных двигателей .......... - 3-2. Величины, характеризующие работу асинхронного двигателя . 51 3-3. Асинхронный двигатель в симметричном режиме....... 52 3-4. Момент о,цнофазного асинхронного двигателя........ 55 3-5. Однофазный двигатель с пусковым сопротивлением...... 56 3-6. Конденсаторный двига+ель................ 61 3-7. Универсальный асинхронный двигатель.......... 64 3-8. Двигатель с экранированными полюсами.......... 68 3-9. Линейный двигатель.................../7 3-10. Индукторный асинхронный двигатель........ . . . 81 Глава четвертая. СИНХРОННЫЕ ДВИГАТЕЛИ...........83 4-1. Общие сведения..................... 4-2. Синхронный двигатель с постоянными магнитами .... . . 84 4-3. Синхронный реактивный двигатель............. 93 4-4. Гистерезисный двигатель.................99 4-5. Субсинхронный двигатель................108 4-6. Двигатели с катящимся ротором . . ..........! 117 4-7. Волновой электродвигатель............... ! 122 Глава пятая. КОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА 5-1. Основные типы. Конструктивные особенности двигателей . . - 5-2. Уравнение ЭДС и момента.................127 5-3. Рабочие и пусковые характеристики двигателей -с параллельным возбуждением и постоянными магнитами........128 5-4. Рабочие и пусковые характеристики двигателей с последовательным возбуждением..........,.........131 5-5. Стабилизация угловой скорости двигателей постоянного тока . 132 5-6. Универсальный коллекторный двигатель..........134 Глава шестая. БЕСКОНТАКТНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА . . 136 6-1. Принцип работы..................... 6-2. Классификация н конструктивное выполнение........142 6-3. Электродвижущие силы, токи и моменты двигателя......145 6-4. Рабочие характеристики.................150 6-5. Стабилизация и управление скоростью двигателя......152 6-6. Датчики положения...................158 6-7. Полупроводниковые коммутаторы.............162 ЧАСТЬ ТРЕТЬЯ ЭЛЕКТРИЧЕСКИЕ МИКРОМАШИНЫ, СПЕЦИФИЧЕСКИЕ ДЛЯ ПРИБОРНЫХ СИСТЕМ И АВТОМАТИКИ Глава седьмая. ТАХОГЕНЕРАТОРЫ 7-1. Назначение и классификация тахогенераторов........ - 7-2. Принцип работы, устройство и величины, характеризующие асинхронный тахогенератор............... 170 7-3. Векторная диаграмма ТА для режима холостого хода . ! ! ! ! 173 7-4. Уравнения ЭДС асинхронного тахогенератора........ 175 7-5. Схемы замещения ТА...................178 7-6. Погрешности ТА............ 180 7-7. Зависимость основных характеристик ТА от параметров машины 187 7-8. ТА с компенсацией изменения магнитного потока...... 189 7-9. Тахогенераторы постоянного тока............[ 192 7-10. Синхронные тахогенераторы............... 1% Гпвва восьмая. СЕЛЬСИНЫ..................198 8-1. Общие сведения..................... 8-2. Упрощенная теория индикаторной синхронной передачи . . . 204 8-3. Зависимость удельного момента от параметров сельсина. Особенности устройства сельсинов...............208 8-4. Точная теория индикаторной синхронной передачи при однотипных датчике и приемнике..... . .......211 8-5. Некоторые специальные режимы работы индикаторной синхронной передачи...................214 8-6. Демпфирование колебаний сельсина-приемника при согласовании ..........................218 8-7. Погрешности индикаторной синхронной передачи ...... гг1 8-8. Теория трансформаторной синхронной передачи.......223 8-9. Погрешности трансформаторной синхронной передачи . . . . 22Ь 8-10. Системы синхронной передачи на магнесинах........229 Глава девятая. ВРАЩАЮЩИЕСЯ ТРАНСФОРМАТОРЫ.......233 9-1. Назначение, устройство и основные режимы работы.....- 9-2. Синусно-косинусный ВТ..........,.......237 9-3. Линейный ВТ......................45 9-4. СКВТ как преобразователь координат...........;4 9-5. СКВТ в режиме фазовращателя..............249 9-6. Трансформаторная синхронная передача на СКВТ.....250 9-7. Погрешности ВТ.................... 9-8. Технологические погрешности СКВТ...........2Ь/ 9-9. Синусные концентрические обмотки вращающихся трансформаторов ........................259 9-10. Многополюсные ВТ................... 9-11. Многополюсный ВТ с сосредоточенными обмотками.....262 9-12. Синусно-косинусный индукционный редуктосин..... п 9-13. Поворотный индуктосин.................270 9-14. Функциональный преобразователь с сосредоточенными обмотками .........................274 9-15. СКВТ с обмотками обратной связи............278 9-16. Цифровые преобразователи угла.............279 Глева десятая. УПРАВЛЯЕМЫЕ ДВИГАТЕЛИ...........282 10-1. Требования к характеристикам двигателей. Классификация - 10-2. Принцип работы, методы управления, особенности конструкции двухфазных управляемых двигателей.........284 10-3. Величины, характеризующие работу двухфазного управляемого двигателя.....................287 10-4. Уравнение ЭДС и электромагнитного момента.......293 10-5. Однофазноевключение .................295 10-6. Механические характеристики..............- 10-7. Выбор емкости для цепи возбуждения..........297 10-8. Схемы замещения....................298 10-9. Оптимизация параметров двухфазного управляемого двигателя ......................... 10-10. Управляемый двигатель постоянного тока с независимым возбуждением ......................301 10-11. Управляемый двигатель постоянного тока с последовательным возбуждением ...................305 10-12. Сравнение управляемых двигателей постоянного тока с управляемыми асинхронными двигателями.........307 10-13. Бесконтактный управляемый двигатель постоянного тока . - 10-14. Совмещенные электрические микромашины........310 Глава одиннадцатая. ШАГОВЫЕ ДВИГАТЕЛИ...........315 11-1. Принцип работы. Методы управления........... - 11-2. Величины, характеризующие работу ШД......... 318 11-3. Характер движения ротора. Режимы работы ШД...... 322 11-4. Конструктивные схемы ШД................ 324 11-5. функциональная схема управления шаговыми двигателями . 328 11-6. Уравнения ЭДС и момента ШД.............. 329 Глава двенадцатая. ЭЛЕКТРИЧЕСКИЕ МИКРОМАШИНЫ ГИРОСКОПИЧЕ= ClfHX 1ТРИБОРОВ.............330 12-1. Гироскопические двигатели................- 12-2. Датчики момента.....................337 12-3. Датчики угла................. 342 12-4, Микросины .....................[347 Глава TjMHaAKatafl. ОЦЕНКА НАДЕЖНОСТИ ЭЛЕКТРИЧЕСКИХ МИКРОМАШИН . ..............349 13-1. Общие понятия.................... . 13-2. Количественные показатели надежности.......... 350 13-3. Причины и характер отказов микроэяектродвигателей .... 354 Список литературы........................356 Предметный указатель ............,.........358 Виталий Васильевич Хрущев ЭЛЕКТРИЧЕСКИЕ МАШИНЫ СИСТЕМ АВТОМАТИКИ Редактор Ю. В. Долгополова Художественный редактор Д. Р. Стеванович Технический редактор Я. А. Минеева Корректор Р. А. Сафарова ИБ № 1445 Сдано в набор 01.04.85. Подписано в печать 23.07.85 М-26554. Формат 60 X 90 /м. Бумага киижно-журнальная. Гарнитура литературная. Высокая печать. Усл. печ. л, 23, Усл. кр.-отт. 23. Уч.-изд. л. 27. Тираж 18 ООО экз. Заказ 678. Цеиа 1 р. 20 к. Ленинградское отделение Энергоатомнздата. 191041, Ленинград, Марсово поле, 1. Ленинградская типография Ns 4 ордена Трудового Красного Знамеин Ленинградского объединения Техническая книга им. Евгении Соколовой Союзполиграфпроыа прн Государственном комитете СССР по делам издательств, полиграфии и книжной торговли. 191126, Ленинград, Социалистическая, 14 1 ... 15 16 17 18 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |