


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 ... 14 15 16 17 18 обычно выполняются однопакетными и многофазными. Характерная геометрия магнитной цепи и конструкция двигателя показаны на рис. 11-10. Зубцы статора на каждом из полюсных выступов расположены симметрично^ а сами полюсы распределены равномерно по расточке. При выполнении этих условий существует жесткая связь между числом зубцов ротора Zp, числом полюсных выступов Zn и числом фаз т. Угол, соответствующий одному полюсному выступу. фп= - (11-8) С другой стороны, этот угол определяет сдвиг между соседними фазными зонами Ф„ = 2я±-а, (11-9) 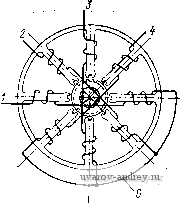 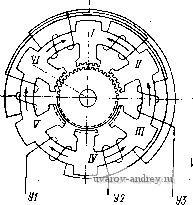 Рис. 11-11. Электрическая схема соединений фазных обмоток ШД Рис. 11-12. Магнитная система и Схема расположения обмоток трехфазного редукторного двигателя где k - целое число; а - коэффициент, причем а = 1, если смежные фазные зоны занимают соседние полюсы, и а= 2, если смежные, фазные зоны занимают полюсные выступы через один. Приравнивая друг другу правые части (11-8) и (11-9), получаем 2п т {km±a) = q {km ± d). (11-10) На рис. 11-11 в качестве примера показана электрическая схема соединения фазных обмоток ШД при m = 4, Zn = 8, Zc = 2, а = 1. Число зубцов на роторе определяется по формуле: Zp = 2 {Ak ±1)! 326 При однополярной коммутации пульсирующие фазные токи можно представить в виде суммы постоянной и переменной составляющих. Магнитное поле статора формально создается двумя обмотками; по одной иЗОбмоток протекает постоянная составляющая тока, создающая поле возбуждения мащины (2р = 8); по второй обмотке, обычно двухфазной, протекает переменная составляющая тока, создающая магнитное поле с числом пар полюсов, равным Zp. Реактивные ШД. В качестве реактивного ШД может быть использован любой трехфазный синхронный двигатель с симметрич- 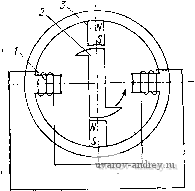 Рис. 11-13. Схема простейшего двухполюсного ШД с клювообразным ротором 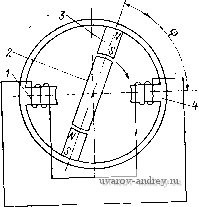 Рис. 11-14. ШД с инерционным выбегом ротора ными фазными обмотками и явнополюсным невозбужденным ротором. С^обенность реактивного ШД состоит в том, что потоки, образованные постоянными составляющими тока в фазах, не замыкаются через воздушный зазор и не участвуют в электромеханическом преобразовании энергии. С целью уменьшения шага реактивные двигатели выполняются редукторными с гребенчатыми зонами на статоре. На рис. 11-12 показана магнитная система и расположение обмоток трехфазного редукторного двигателя. Однофазные ШД. Этот тип двигателей широко применяется в приборных системах благодаря чрезвычайной простоте системы управления. Отличительная особенность этих двигателей: избирательное (одно) направление вращения. На рис. 11-13 представлена схема простейшего двухполюсного ШД с клювообразным ротором. При обесточенной обмотке управления 1 ротор 2 фиксируется постоянными магнитами 3. При подаче управляющего импульса ротор поворачивается на 90° и устанавливается по оси полюсов; при отключении управляющей обмотки он поворачивается еще на 90° и фиксируется полем постоянных магнитов и т. д. Шаг равен 90°. Обычно двигатели этого типа выполняются многополюсными. 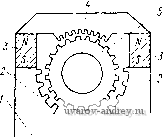 Рис. 11-15. Магнитная система гармонического ШД Избирательность в направлении вращения можно реализовать и в ШД с симметричными полюсами путем размещения фиксирующих и управляющих полюсов статора неперпендикулярно друг другу. Такие двигатели называются ШД с инерционным выбегом ротора. На рис. 11-14 показана схема такого ШД в двухполюсном исполнении. При отсутствии тока в обмотке управления / ротор 2 фиксируется полем постоянных магнитов 3; при подаче напряжения на обмотку / ротор 2 движется к ближайшим пусковым полюсам. Когда ротор приходит в положение, соос-ное с полюсами 4, скорость его максимальна: в этот момент управляющий импульс снимается, и ротор продолжает движение по инерции и под действием фиксирующих постоянных; магнитов приходит в новое устойчивое положение. Шаг двигателя равен л. Двигатели этого типа обычно выполняются многополюсными в торцевом или цилиндрическом исполнении. Среди однофазных ШД следует отметить большую группу двигателей, основанных на суммировании гармоник момента. На рис. 11-15 показана магнитная система гармонического двигателя с суммированием двух гармоник момента. Профиль зубцов ротора 5 симметричен, а число зубцов зависит от шага двигателя. Профиль зубцов фиксирующего полюса 4 и пусковых полюсов 2 симметричен; зубцовое деление пусковых полюсов равно зубцовому делению ротора; фиксирующий полюс 4 отделен от пусковых полюсов двумя постоянными магнитами 3, намагниченными встречно. На ярме / установлена обмотка управления 6. Взаимное расположение зубцов ротора и полюсов таково, что при обесточенной обмотке управления зубцы ротора противостоят зубцам фиксирующего полюса, а зубцы пусковых полюсов смещены на угол, меньший половины зубцового деления. При подаче управляющего импульса ротор устанавливается в положение, при котором зубцы ротора и пусковых полюсов совпадают. После снятия импульса ротор с помощью потока постоянных магнитов вновь фиксируется в положении, смещенном на одно зубцовое деление ротора. По принципу работы данный двигатель можно отнести к ШД индукторного типа. 11-5. Функциональная схема управления шаговыми двигателями Управление ШД осуществляется с помощью специального электронного блока, который является, по существу, статическим преобразователем частоты, вырабатывающим т-фазную систему напряжений несинусоидальной формы. Функциональная схема блока управления ШД приведена на рис. 11-16. Преобразователь П непрерывного сигнала в последовательность импульсов напряжения используется в тех случаях, когда входная информация задается в виде непрерывно изменяющейся величины. Формирователь импульсов ФИ преобразует поступающие на его вход импульсы в импульсы требуемой длительности. Распределитель импульсов РИ преобразует эту последовательность импульсов в т-фазную систему импульсов напряжения, которая через усилитель мощности УМ подается на обмотки ШД. Регулятор напряжения РН, управляемый (с помощью вычислитель- I I - Рис. 11-16. Функциональная схема блока управления ШД ного устройства ВУ) входными сигналами, формирует необходимое напряжение на фазах ШД. Обычно ШД работают при неизменном фазном напряжении; в этом случае регулятор напряжения и вычислительное устройство из схемы управления исключаются. 11-6. Уравнения ЭДС и момента ШД В общем случае ШД представляет собой т-фазиую электрическую машину с двусторонней зубчатостью. Фазы двигателя имеют импульсное возбуждение, характер которого определяется способом коммутации. Двигатели с активным ротором (постоянными магнитами) могут рассматриваться как электрические машины, имеющие фиктивную (т + 1)-ю фазу с постоянным током и нулевым сопротивлением. Потокосцепления обмоток ШД без учета насыщения являются линейными функциями токов i,-: m-Ы где ifc/ (9) -: взаимная индуктивность А-й и /-й обмоток; k - 1, 2, .. . , m -f 1. Уравнения ЭДС и момента двигателя запишем в виде + М„= М, (11-11) М - электромагнитный момент. p (11-12) Полученные нелинейные дифференциальные уравнения с периодическими коэффициентами позволяют исследовать электромагнитные процессы в режимы работы ШД для любого способа управления. Естественно, что такое исследование возможно только с помощью ЦВМ. Составим уравнения напряжений и момента двухфазного ШД с активным неявнополюсный ротором. Примем за начало отсчета угла О положение, при котором ось полюса ротора совпадает с осью фазы 1 (рис. 11-17). Имеем = L22 = Ic = const; I33 = Lp = Рис. 11-17. Схема ШД с короткозамкнутым иеявнопо-люсным ротором const; Lit = 0; L23 = М cos 9; L13 = М sin в; ri= г; I3 = const; W т- максимальное потокосцепление возбужденного ротора т: одной фазой статора. С учетом 9ТИ X выражений в соответствии с уравнениями (11-11). получаем riij-fLe-+YmCOse= i; dt dt  rtit + Lc Ymsin == M ; -f Л1н = pVm (il COS e - t, sin 9). (11-13) P Mi f Аналогично можно получить уравнения напряжений и момента трехфазных ШД; с помощью стандартной процедуры преобразования координат они могут быть сведены к уравнениям ЭДС двухфазной системы в осях d и . Главе двеивдцвтвя ЭЛЕКТРИЧЕСКИЕ МИКРОМАШИНЫ ГИРОСКОПИЧЕСКИХ ПРИБОРОВ 12-1. Гироскопические двигатели Особеииости работы электрических гиродвигателей. Главное требование, предъявляемое к гиродвигателю,- достаточно большой кинетический момент ротора. Для электрических гиродвигате-330 лей это требование наилучшим образом удовлетворяется применением обращенной конструкции машины при относительно высокой угловой скорости, а для двигателей переменного тока - применением повышенной частоты питания (400 Гц и более) и малого числа пар полюсов. Основной режим работы гиродвигателя - режим максимальной скорости ротора, который для обычных электродвигателей является режимом холостого хода. Однако для гироскопических электродвигателей этот режим работы следует считать номинальным, так как нагрузка на электродвигатель близка к предельной при установившемся режиме работы;это объясняется двумя обстоятельствами, обусловленными обращенной конструкцией двигателя: с одной стороны, вследствие больших габаритов и массы ротора тормозной момент сил трения о воздух и в подшипникал{ значительно больше, чем в обычном электродвигателе тех же габаритов; с другой стороны, мощность двигателя вследствие меньшей площади, занимаемой обмоткой статора, и худших условий охлаждения значительно ниже. Важным режимом работы для гироскопического двигателя является пусковой режим. Вследствие большого момента инерции ротора двигателя и относительно малого электромагнитного момента пуск гироскопического двигателя может быть весьма продолжительным, иногда до 20-30 мин. При проектировании гироскопического электродвигателя стремятся максимально сократить время пуска при обеспечении приемлемой тепловой нагрузки в процессе пуска. Основными величинами, характеризующими работу гироскопического электродвигателя, являются: 1) мощность и ток, потребляемые в установившемся режиме; 2) максимальная (номинальная) скорость; 3) кинетический момент Я =/рсоро - произведение момента инерции ротора и его максимальной угловой скорости; 4) стабильность вектора кинетического момента при колебаниях напряжения и частоты сети в определенных границах и при длительной работе двигателя; 5) максимальные мощность и ток, потребляемые при пуске; 6) время пуска; 7) сро:< службы. Асинхронный гироскопический двигатель с ротором типа беличьей клетки. Этот тип двигателя является наиболее распространенным. Асинхронный гироскопический двигатель представляет собой асинхронную электрическую машину с короткозамкнутым ротором обращенной конструкции, принципиальная схема которой приведена на рис. 12-1. На статоре 4 уложена трехфазная обмотка 8, образующая вращающееся магнитное поле. В маховик 7 запрессован магиитопровод ротора 5 с беличьей клеткой 6. Маховик жестко насажен на вал 10, вращающийся в радиально-упорных подшипниках 2. Статор крепится на выступе крышки 1, которая прикреплена винтами 3 к защитному кожуху 11. В кожухе для вентиляции двигателя сделаны отверстия 9. Рассмотренная конструкция двигателя вследствие асимметрии маховика (место крепления маховика к валу не совпадает с цент- ром тяжести маховика) не обеспечивает стабильности вектора кинетического момента при изменении температуры и вибрациях, и гиродвигатель такого типа применяется в относительно грубых гироприборах. Для точных гироскопических систем используют гиродвигатель с симметричным ротором и двумя внутренними статорами (рис. 12-2). Он представляет собой совокупность двух асимметричных гиродвигателей с общим маховиком. Для уменьшения трения ротора в газовой среде гиродвигатель помещается в герметичную камеру и заполняется гелием или водородом. 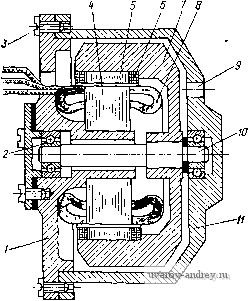 Рис. 12-1. Асинхронный несимметричный гироскопический двигатель / - подшипниковый щит; 2 - подшипник; 3 - винт; 4 - статор; 5 - магнитопровод ротора; 6 - катушечная обмотка; 7 - маховик; 8 - обмотка; 9 - вентиляционное отверстие; \0 - вал; М - корпус Принцип работы двигателя и основные электромагнитные соотношения остаются такими же, как и для обычного асинхронного двигателя при симметричном режиме работы, и были рассмотрены в § 3-3. Определим время пуска двигателя, полагая, что момент сопротивления нагрузки состоит из момента трения в подшипниках и момента сопротивления ггзовой среды, пропорционального квадрату угловой скорости: Ми = Мпост + OiCOp. Считая, что электромагнитный момент двигателя достаточно точно выражается формулой Клосса (3-8), уравнение движения ротора при пуске запишем в виде Jp-+MnoCT + aiWp = /W aKC--;-, , , . где Ммакс - максимальный момент; Sk - критическое скольжение. 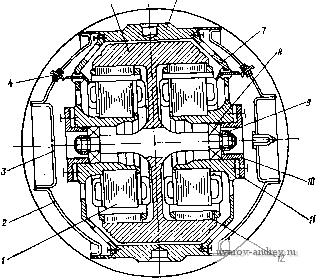 Рис. 12-2. Асинхронный симметоичный гироскопический двигателе / - статор; 2 - основной кожух; 3 - дополнительный кожух; 4 - гермовывод; 5 - маховик; 6 - корпус; 7 - крышка; 8 - шарикоподшипник; 9 - гайка; 10 - фланец; /; - шайба; 12 - магнитопровод ротора Заменяя юр = ыс (1-s) и выполняя интегрирование по s от до 1, получаем Тпуск=То--. (12-1) 2(aSK+l) 2asK + Sk/s + s/k --/Ппост - r.cpCl - S) где To = рЮсШмакс - постоянная времени разгона; Шпост = = Л^пост/Л^макс; ГПт. ср = ахОс/Л^макс - УДбЛЬНЫС МОМСНТЫ СОПрО- тивления подшипников и газовой среды. Синхронный гироскопический двигатель. В качестве синхронных гироскопических двигателей, как правило, используются гистерезисные двигатели. Это объясняется их хорошими пусковыми свойствами и легкостью входа в синхронизм. Синхронные двигатели с постоянными магнитами и реактивные синхронные двигатели для пуска имеют беличью клетку и в пусковом режиме работают, как асинхронные двигатели. При достижении скорости, соответствующей некоторому скольжению, зависящему от момента нагрузки ротор втягивается в синхронизм за счет воздействия на него синхронного момента, однако ввиду большого момента инерции маховика гиродвигателя процесс входа в синхронизм чрезвычайно затруднен. В гистерезисном двигателе (см. § 4-4) момент, приложенный к ротору двигателя, не зависит от скорости и остается постоянным вплоть до достижения синхронной скорости. Он определяется намагничивающей силой статора F, магнитным потоком Ф и ги-стерезисным углом е. После входа в синхронизм двигатель превращается в недовозбужденный синхронный двигатель с постоянными магнитами. Для работы гистерезисного ,гироскопического двигателя в синхронном режиме необходимо, чтобы момент сопротивления нагрузки был меньше гистерезисного момента: Л^н < Мг- По своему устройству статор гистерезисного гиродвигателя совершенно аналогичен статору асинхронного гиродвигателя. Отличие состоит в конструкции ротора. Вместо магнитопровода ротора 5 и беличьей клетки 6, как на рис. 12-1, здесь в маховик запрессованы кольца из викаллоя толщиной Д, выбранной из условия получения максимального момента. Синхронные гистерезисные гиродвигатели обычно проектируются для точных гиро-систем и имеют симметричный маховик и два внутренних статора. Время пуска гистерезисного гиродвигателя находим из уравнения J dffl£ д^ + Ui(ul = Mмакс- Отсюда, используя введенные выше обозначения, получаем Тпуск - =ч\-- (12-2) где v = (Ор/(Ос - относительная угловая, скорость ротора. Выполняя интегрирование в (12-2), будем иметь 1 + V тг.ср/{1- пост) Тпуск - 1п . (12-3) 2 у Иг. ср (1 - пост) 1 - у г.ср/{1 - пост) Гироскопический двигатель типа шар . Принципиальная конструктивная схема шарового гиродвигателя приведена на рис. 12-3. Ферромагнитный шар 3, поддерживаемый аэродинамической опорой /, приводится во вращение внешним магнитным полем, образуемым трехфазной обмоткой статора 4. Как уже указывалось, этот тип двигателя отличается от обычных двигателей тем, что его ротор жестко не закреплен в опорах и имеет три вращательные степени свободы. При совпадении осей вращения ротора и магнитного поля статора к шару приложен вращающий электромагнитный момент, в установившемся режиме равный моменту сил сопротивле- ния в аэродинамических опорах. Обычно ширина пакета статора невелика, и расчет вращающего момента, создаваемого статором, можно провести по методике, разработанной для асинхронных двигателей со сплошным ферромагнитным цилиндрическим ротором. [18]. По причинам, рассмотренным ниже, гироскопические шаровые двигатели работают при большом номинальном скольжении {5ц 0,2-0,5), при котором частота тока в роторе такова, что четко проявляется поверхностный эффект. В этом случае схема замещения двигателя со сплошным ферромагнитным ротором имеет вид, изображенный на рис. 12-4. Сопротивление контура, соответствующее сплошному ротору, находится по формуле 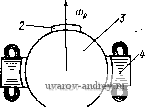 Рис. 12-3. Конструктивная схема гироскопического двигателя типа шар 1 - аэродинамическая опора; 2 - грибок; 3 - стальной шар; 4 - статор с трехфазной обмоткой Рис. 12-4. Схема замещения асинхронного двигателя со сплошным ферромагнитным ротором где ц И рст - магнитная проницаемость и удельное сопротивление материала ротора; k - коэффициент, учитывающий сопротивление лобового участка сплошного ротора и зависящий от отношения длины пакета статора / к полюсному делению т; приближенно можно принять [18] 1/л = (2,55ч-4) т. Зная параметры схемы замещения, можно рассчитать токи, двигателя и момент при заданном фазном напряжении /i = т р im + Zp т (12-5> и построить механическую характеристику двигателя в функции: скольжения (рис. 12-5). При отклонении оси вращения ротора от оси вращения статора на некоторый малый угол (рис. 12-6) на ротор действуют дополнительные моменты, вызывающие прецессионное движение шара. На основе анализа опытных данных акад. А. Ю. Ишлинский показал, что проекции момента, действующего на шар, на оси дс и у', перпендикулярные оси вращения шара, будут Л1 = -Н{%х, + 1у{); (12-6)
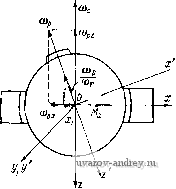 Рис. 12-5. Механическая характеристика асинхронного двигателя со сплошным ферромагнитным ротором Рис. 12-6. К расчету корректирующего момента шарового гироскопического двигателя где Н = JpiOp - кинетический момент шара; Я, - постоянные; Xj, Ух - проекции единичного вектора Ир/шр, определяющего ось вращения ротора, на плоскость Оху, совпадающую с диаметральным сечением статора (на рис. 12-6 {,1 = 0). При выборе режима работы и проектировании двигателя необходимо стремиться к уменьшению коэффициентов X и . Найдем приближенную зависимость коэффициентов X и I от скольжения. Вследствие поверхностного эффекта при вращении шара во внешнем переменном магнитном поле ток индуцируется в тонком слое толщиной Д (рис. 12-7). Вектор плотности поверхностного тока )=-Е, (12-7) 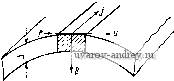 Рис. 12-7. К определению момента сил, создаваемых поверхностными токами ротора Рст где Е = иХ В - напряженность электрического поля, индуцируемого внешним магнитным полем; и - линейная скорость поверхности ротора относительно поля статора. Сила, приложенная к единице поверхности ротора, f = j X В. Подставляя сюда J из (12-7) и учитывая взаимную перпендикулярность векторов В, 41 и j , получаем Рст Плотность момента сил - момент на единицу площади поверхности ротора - будет , m=RXf=--B2(RXu); (12-8) Рст здесь R - радиус-вектор, по модулю равный радиусу шара. Но U = (Юр - ©с) X R. Подставляя это выражение в (12-8), раскрывая двойное векторное произведение и учитывая, что среднее значение В^ = В^/2, найдем среднюю плотность момента сил /Пер =-- [ЯЦЮс - *)р) - R ( с - р) R] (12-9) 2рст Проецируя это выражение на координатные оси х', у', г' и интегрируя полученные составляющие по поверхности ротора, находящейся в поле статора, можно получить составляющие момента М^ My, и М^. Даже при малом угле рассогласования между векторами Шр и сос расчеты оказываются весьма громоздкими. Приведем окончательные выражения для М^, и My, при малом угле рассогласования векторов <л^ и о),: Мг \ + s где ki - коэффициент, учитывающий явление затягивания - смещение поля статора при вращении ротора; он зависит от воздушного зазора и изменяется от 0,05 до 0,3. Сравнивая с формулами (12-6), находим 1 -fs 1 -s2 (12-10) 2Я S 2Я S - где - составляющая момента по оси г, равная электромагнитному моменту двигателя. Отсюда следует, что для уменьшения коэффициентов X и корректирующего момента шарового гиродвигателя необходимо увеличивать скольжение. Это достигается выбором малой индукции магнитного поля в воздушном зазоре двигателя. Для получения достаточного кинетического момента в шаровых гиродвигателях применяют повышенную частоту питания, 500 и 1000 Гц. 12-2. Датчики момента Общие сведения. Электромагнитными датчиками момента (ДМ) или моментными двигателями называются электрические машины, преобразующие подводимое к ним напряжение или ток управления в пропорциональный им вращающий момент. В отличие от обычных двигателей ДМ не имеет вращения ротора, так что при анализе их работы можно считать юр = 0. ДМ применяются как корректирующие устройства для управления гироскопами, а также как исполнительные механизмы в без-редукторныХ силовых передачах. В зависимости от типа питающего и управляющего напряжений различают ДМ постоянного и переменного тока. В качестве ДМ переменного тока используются двухфазные асинхронные машины с полым немагнитным или ферромагнитным омедненным ротором. ДМ постоянного тока имеют концентрическую обмотку управ- ления и ротор в виде постоянного магнита (см. стр. 341). В последнее время в качестве ДМ постоянного тока стали применяться многополюсные бесконтактные двигатели постоянного тока. Как элемент, применяемый в гироскопических приборах, ДМ характеризуется следующими величинами: 1) потребляемыми мощностью и током при номинальных напряжениях возбуждения, управления; 2) номинальным моментом Л1; 3) нелинейностью зави- 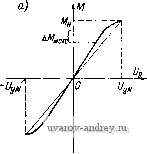
 У Рис. 12-8. Зависимость момента ДМ от управляющего напряжения симости момента ДМ от управляющего напряжения (рис. 12-8, а) И-нели = А-ИмаксШл/; ) несиммстрией зависимости момента от управляющего напряжения при перемене знака Uy (рис. 12-8, б) t-inecM = tMnJMi; 5) остаточным момен- (-: том при отсутствии управляющего напря- f \ Uf жения (тока) Мост (рис. 12-8, б); 6) относи- тельным изменением момента при колебаниях напряжения, частоты сети и температуры окружающей среды. Моментные двигатели переменного тока. Электрическая схема моментного двигателя приведена на рис. 12-9. На статоре двигателя располагаются две смещенные в пространстве на 90° обмотки -возбуждения и управления. Ротор двигателя для наибольшей электрической симметрии, необходимой для снижения остаточного момента, выполняется в виде полого немагнитного стакана или омедненного ферромагнитного цилиндра. Конструктивно двухфазный моментный двигатель выполняется без подшипниковых узлов, в виде двух раздельных частей: ротора, закрепляемого на оси прецессии гироскопа, и статора на неподвижной опоре. Обмотка возбуждения постоянно находится под номинальным напряжением Uff, а на обмотку управления у подается управляющее напряжение, которое сдвинуто по фазе на некоторый угол по отношению к напряжению возбуждения. В двигателе образуется эллиптическое вращающееся магнитное поле, которое при взаимодействии с ко- Рис. 12-9. Электрическая схема двухфазного моментного двигателя роткозамкнутым ротором создает вращающий момент. Момент двигателя при ненасыщенной магнитной системе определяется по формуле где к' - коэффициент пропорциональности. Обозначим через М^ момент при круговом пбле, для которого Uy = Uyi; г|) = п/2; (12-11) при этом гДе X = UylUyf - коэффициент управления. Номинальный момент двигателя М, при круговом вращающемся магнитном поле находится формулой где Ра - мощность, рассеиваемая в роторе. Так же как и для управляемого двухфазного асинхронного двигателя в пусковом режиме, эффективность преобразования электрической энергии ДМ принято характеризовать моментом, приходящимся на ватт потребляемой мощности, Pi-bPa 2nf Р1 + Р2 Ы l + PilPi где Pi - мощность, рассеиваемая в статоре. Для двигателя с полым немагнитным ротором в соответствии с формулой (10-50) получаем (12-12) + rf Найдем зависимость момента т от толщины Р°°Р^з^: Для параметров двухфазной электрической машины с полым ротором имеем [8, 32] -=feiA; L = fta(A-bSt), (12-13) где 2,55йлРа/(1 фйоб)* Af\iolD(wko6) Здесь bi - чистый воздушный зазор ДМ. Подставляя выражения (12-13) в формулу (12-12), получаем
2я kiA + r,A4ri4{A + iy (12-14) Приравнивая производную dmIdA к нулю, находим толщину стенки ротора д = е,-5-- +2 -feo(o+Vo+l) (12-16) где г' - приведенное к обмотке возбуждения активное сопротивление полого ротора при Д = 8i. Анализ выражения (12-16) показывает, что т„акс как функция числа пар полюсов имеет наибольшее значение при P 8-10-sdV№-Здесь D в сантиметрах, а ра в Ом-см. Рассмотренный идеализированный ДМ с симметричными обмотками имеет следующие характеристики: 1) равный нулю момент приотсутствии управляющего напряжения (А, = 0); * 2) линейную и симметричную зависимость момента от управляющего напряжения, т. е. при изменении фазы управляющего напряжения на 180° момент ДМ меняет знак. Вследствие технологических погрешностей в ДМ появляются остаточные моменты, а зависимость момента от управляющего напряжения оказывается нелинейной и несимметричной. Наиболее часто технологические погрешности ДМ сводятся к асимметрии магнитопровода, статора, электрической асимметрии ротора к эксцентриситету. Рассмотрим кратко влияние погрешностей на характеристики ДМ. L Асимметрия магнитопровода статора. Этот вид асимметрии обусловлен образованием короткозамкнутых витков из-за замыкания пластин в пакете магнитопровода, а также неравномерностью магнитной проводимости пакета из-за плохого качества веерной сборки, брака отдельных листов и т. п. Если ось короткозамкнутого витка и направление наибольшей магнитной проводимости не совпадают с осью обмотки возбуждения, то такой ДМ можно рассматривать как асинхронный двигатель с экранированными полюсами (см. § 3-8), в котором при включении в сеть обмотки возбуждения образуется эллиптическое вращающееся магнитное поле и постоянный вращающий момент. Напряжение на обмотке управления является переменным, и момент, создаваемый этой обмоткой из-за действия короткозамкнутого витка, также будет переменным, пропорциональным квадрату управляющего напряжения. Совокупность действия этих двух причин приводит к асимметрии и нелинейности зависимости момента ДМ от управляющего напряжения. Для уменьшения влияния асимметрии магнитопровода статора на линейность характеристик ДМ последний необходимо выпол- 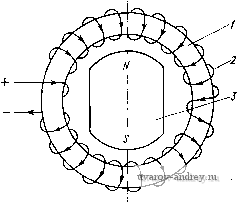 пять с числом пар полюсов, большим двух. При большом числе пар полюсов добавочные моменты, обусловленные короткозамкнутыми витками, взаимно компенсируются и несимметричность зависимости момента ДМ от управляющего напряжения уменьшается до допустимых пределов. В двухполюсных ДМ необходимо перед укладкой обмотки определять оси магнитной симметрии пакета статора и располагать оси обмоток по осям магнитной симметрии. 2. Асимметрия ротора. Асимметрия короткозамкнутого ротора практически сводится к неоднородности электропроводности его участков, обусловленной разной толщиной стенки полого ротора или медного покрытия для ДМ с ферромагнитным ротором. Реальный ротор ДМ можно представить себе как совокупность симметричного ротора и группы короткозамкнутых витков, характеризующих отклонение ротора ДМ от симметричного. Эти витки будут взаимодействовать с обмоткой возбуждения ДМ, если их числа пар полкхов будут совпадать. Появляющийся при этом остаточный момент за один оборот ротора имеет число периодов, равное числу пар полюсов. Наибольший остаточный момент наблюдается при р = 1, поэтому для уменьшения остаточного момента при асимметрии ротора желательно также, чтобы р>2. Если диапазон угла поворота ротора ДМ невелик и составляет несколько градусов, то путем поворота ротора можно выбрать такую рабочую точку, в которой остаточный момент не превосходит допустимого по условиям работы. 3. Эксцентриситет магнитопроводов статора и ротора появляется за счет того, что они крепятся к разным частям гироприбора и их соосность конструктивно не обеспечена. Непостоянство воздушного зазора из-за эксцентриситета приводит к появлению в электрической машине высших пространственных гармоник в индукции. Анализ структуры магнитного поля при небольшом эксцентриситете в многополюсных ДМ показывает, что обмотки не имеют дополнительных потокосцеплений; отсюда следует, что эксцентриситет в первом приближении не влияет на характеристики многополюсного ДМ. Моментные двигатели постоянного тока. Наиболее простым и удобным в управлении является ДМ, схема которого приведена на рис. 12-10. Статор представляет собой ферромагнитный кольцевой сердечнлк /, на который уложена однослойная обмотка 2, со- Рис. 12-10. Схема ДМ постоянного тока / - статор; 2 - обмотка; 3 - ротор Подставлия Д в (12-14), находим стоящая ив двух половин со встречным направлением НС. Ротор 3 - постоянный магнит, ось которого в нормальном (неотклонен-ном) положении проходит через, середины .полуобмоток. При протекании тока по обмотке на ротор ДМ действует момент M = lDwJB, (12-17) где D - внутренний диаметр статора; Wn - число проводников под полюсом; i - ток в обмотке; В - индукция магнитного поля в зазоре; / - осевая длина магнита. Управление ДМ производится путем изменения значения тока в обмотке и его направления. При повороте ротора ДМ момент сохраняет постоянное значение, пока число проводников под полюсом с током одного направления остается постоянным; в реальных образцах ДМ этот угол составляет ± 50°. В тех случаях, когда от ДМ постоянного тока требуется вращение ротора в пределах одного или нескольких оборотов, применяются многосекционные обмотки с коммутацией тока с помощью полупроводникового коммутатора, управляемого датчиком положения ротора аналогично тому, как это делается в бесконтактных двигателях постоянного тока. 12-3. Датчики угла Общие положения. Для определения углового положения гироскопа и передачи этих данных в систему управления гироприбо-ром необходимо преобразовывать угол поворота карданных колец или щара (в случае щарового гироскопа) в другую физическую величину, более удобную для дистанционной передачи и дальней-щего использования. Устройства, выполняющие преобразование такого рода, называются датчиками угла. К датчикам угла, применяемым в гироприборах, предъявляются следующие требования: 1) момент, прикладываемый к гироскопу, должен быть минимальным; Ш 2) характеристика датчика должна быть линейной, t/вых = koc, где t/вых - напряжение, снимаемое с датчика; а - угол поворота ротора; - коэффициент пропорциональности, называемый крутизной характеристики датчика; 3) порог чувствительности должен быть минимальным, с тем чтобы обеспечить фиксирование достаточно малых углов поворота гироскопа; 4) масса и габариты подвижных частей датчика также должны быть минимальны, с тем чтобы не увеличивать трение в опорах гироприбора; 5) мощность сигнала, снимаемого с датчика, должна быть наи' большей; это позволяет в ряде случаев не прибегать к усилению сигнала, что упрощает общую схему; 6) характеристика датчика должна быть стабильной и независимой от условий работы прибора; 7) остаточный сигнал датчика и шумы должны быть минималь ными; в выходном напряжении датчиков, работающих на переменном токе, не должно быть высших гармоник, помех и остаточных ЭДС, сдвинутых по фазе на 90° относительно полезного сигнала. Перечисленные требования иногда оказываются противоречивыми; так, например, увеличение выходной мощности приводит к увеличению момента, создаваемого датчиком. Решение вопроса о том, какое из перечисленных требований является основным, зависит от типа гироскопической системы, ее назначения и требуемой точности. В качестве датчиков угла могут применяться устройства различного типа: потенциометрические, индукционные, емкостные, электрические, пневматические, электромашинные и т. п. В настоящем параграфе рассматриваются электромашинные кольцевые датчики угла и датчики угла для шарового гироскопа типа следящий трансформатор . Электромашинные кольцевые датчики угла. Кольцевые датчики угла представляют собой вращающиеся трансформаторы плоского типа с переменным коэффициентом трансформации, который изменяется в зависимости от относительного углового положения ротора и статора датчика. Основными величинами, характеризующими работу датчика угла, являются: 1) потребляемые мощность и ток при номинальных напряжении возбуждения и частоте сети; 2) рабочий диапазон угла поворота; 3) крутизна выходной характеристики; 4) линейность выходного напряжения в зависимости от угла поворота ротора; 5) симметрия выходного напряжения относительно знака угла; 6) остаточная ЭДС при нулевом отсчете угла; 7) выходное сопротивление датчика; 8) реактивный момент. По принципу изменения взаимной индуктивности первичной и вторичной обмоток кольцевые датчики делятся на три типа: 1) с сосредоточенными или распределенными обмотками на статоре и роторе; 2) с короткозамкнутой обмоткой на роторе; 3) без обмотки на роторе. Рассмотрим кратко особенности датчиков угла каждого типа. Кольцевые датчики угла с обмотками на статоре и роторе. В настоящее время этот тип кольцевого датчика является наиболее распространённым в гироскопических приборах. Магиитопровод датчика состоит из двух колец (рис. 12-11), в пазы которых уложены по две взаимно перпендикулярные сосредоточенные или распределенные обмотки. С целью исключения влияния эксцентриситета на работу датчика угла обмотки выполняются многополюсными. Для уменьшения реактивных моментов производится скос пазов внешнего и внутреннего магнитопроводов на одно зубцовое деление. У большинства датчиков угла взаимная индуктивность обмоток статора и ротора изменяется по синусоидальному закону в зависимости от ра [р - число пар полюсов). В этом случае удовлетворительная линейность выходной характеристики (с точностью до I %) даже при р = 2 достигается в диапазоне угла поворота ротора ± 15°. Принципиально дЛя работы датчика угла достаточно по одной обмотке на статоре и роторе. Применение двух взаимно перпендикулярных обмоток на статоре и роторе позволяет сделать датчик более универсальным и использовать его для синхронной пфедачи угла. Электромагнитные соотношения и уравнения ЭДС для кольцевого датчика этого типа совершенно такие же, как для двухполюсных и многополюсных ВТ, работа которых подробно рассмотрена в гл. 9. Датчики с короткозамкнутой обмоткой на роторе. Недостатком датчиков, имеющих обмотку на роторе, является необходимость осуществления токоподвода к ротору. Это увеличивает момент, необходимый для поворота ротора, что приводит к снижению точности датчика и уменьшению надежности его работы. Чтобы исключить этот недостаток, ротор выполняют с короткозамкнутой обмоткой, а статор - с двумя обмотками, сдвинутыми относительно друг друга на 90°. Одна из обмоток статора - обмотка возбуждения, а другая - выходная обмотка. Принципиальная схема такого датчика приведена на рис. 12-12. Выходная ЭДС датчика создается поперечной составляющей магнитного потока ротора. Принимая, что взаимная индуктивность обмоток статора и ротора изменяется по синусоидальному закону, составим уравнения ЭДС 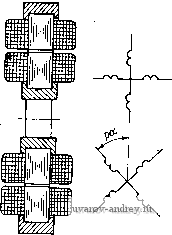 Рис. 12-11. Конструктивная и электрическаи схемы кольцевого датчика угла с сосредоточенными обмотками
(12-18) здесь Zf = rf -4- jXfs - собственное сопротивление обмотки возбуждения; Zp = лр -Ь jxps - приведенное к обмотке возбуждения собственное сопротивление роторной обмотки; Zy = Гу /jCy, -f -f Zh - приведенное к обмотке возбуждения собственное сопротивление выходной обмотки, включая сопротивление нагрузки. Решая уравнения (12-18) относительно тока /у, получаем sin 2а L jXm V iXm )\ Ч ]>CmJ IXmJ (12-19) Выходное напряжение датчика t/B.x = /v2;; (12-20) OHO, как и ток, изменяется по синусоидальному закону в зависимости от двойного угла поворота ротора и имеет максимум при а, близком к 45°. 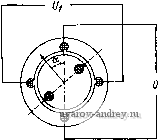 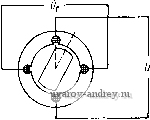 Рис. 12-12. Датчик угла с короткозамкнутым витком на роторе Рис. 12-13. Датчик угла с явнополюсным ротором Датчик имеет сравнительно простую конструкцию, однако контур с током на роторе вызывает момент обратного воздействия, который значительно больше соответствующего момента для датчиков угла с обмотками на статоре и роторе. Датчик угла без обмоток на роторе. Принципиальная схема датчика приведена на рис. 12-13. На статоре датчика укладываются две обмотки (обычно распределенные), оси которых смещены на 90°. Одна из обмоток - обмотка возбуждения, другая - выходная. Ротор явнополюсной и имеет такое же число пар полюсов, что и обмотка статора. При совпадении осей полюсов ротора с осями обмоток ЭДС на выходной обмотке датчика становится равной нулю. ЭДС достигает максимального значения, когда этот угол составляет 45°. Недостаток датчиков этого типа - наличие реактивного момента и большая нелинейность в зависимости выходной ЭДС от угла поворота ротора. Указанные недостатки можно устранить, применив явнополюсную конструкцию статора и дифференциальную схему включения обмоток. Такая машина известна как микросин. Индукционный датчик угла с перемещающимся ротором представляет собой электромеханическое устройство, выходной элек. трический сигнал которого пропорционален изменению магнит, него потока возбуждения, вызываемому перемещением ротора, 1 ... 14 15 16 17 18 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |