


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 ... 13 14 15 16 17 18 Принимая те же допущения, что и для двигателя с независимым воч буждением, можно составить уравнение ЭДС и момента (рис 10 25)Т (10-61) . скГосГ . Ри и? заменим зависимости яховые (10-62) токаи скорости от момента (рнсМО-26) 7иГе=Гфу=Г^ М = kii; М = - fejfflp + кз, где ki, k, *з - постоянные коэффициенты. 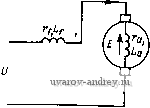 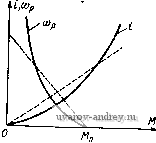 Рис. 10-25. Электрическая схема управляемого двигателя с последовательным возбуждением Рис. 10-26. Линеаризация характеристик управляемого двигателя с последовательным возбуждением г-г. * зависимость Еа от (Ор при выполнении условий (10-62) Для установившегося режима из первого уравнения (10-61) находим M = ki М и (rf + ra)+ Еа; rf + rf + Га Сравнивая со вторым уравнением (10-62), получаем (rf -Ь Га) Шр. Подставляя в первое уравнение (10-61), будем иметь ra-\-rf ra-\-rf dt Учитывая уравнение движения ротора J находим kil(ra + rf) и La+Lf La+Lf \р+Етр + к' (10-63) Га + rf \ Га + rf При указанной линеаризации передаточная функция двигателя с последовательным возбуждением аналогична передаточной функции двигателя с независимым возбуждением (10-57); однако в отличие от двигателя с независимым возбуждением здесь нельзя пренебречь членами, содержа-La±Lf ra-rf 10-12. Сравнение управляемых двигателей постоянного тока с управляемыми всинхронными двигателями Преимущества управляемых двигателей постоянного тока: 1) более высокие энергетические показатели в тех же габаритах; 2) меньшая мощность управления, что позволяет уменьшить габариты усилителя; 3) более простое формирование сигналов, пропорциональных скорости, для стабилизации следящих систем; 4) более простое регулирование скорости; 5) незначительное потребление мощности при неподвижном роторе двигателя и нулевом управляющем напряжении; 6) возможность использования управляемого двигателя постоянного тока в качестве тахогенератора достаточно высокой точности; 7) отсутствие принципиальных ограничений по выбору максимальной и минимальной угловых скоростей; 8) отсутствие самохода. Недостатки: 1) значительный дрейф нуля в усилителях постоянного тока, применяемых для управления, что вызывает погрешности в точных приборных системах; 2) низкая надежность вследствие большого износа щеточно-коллекторного узла; 3) наличие радиопомех, создаваемых искрением под щетками; 4) повышенное напряжение трогания вследствие сухого трения щеток о коллектор и реактивных моментов от пульсаций магнитного потока; 5) наличие нелинейностей, гистерезиса, больших индуктивностей, требующее специальных мер по стабилизации в системах автоматического регулирования. Указанные недостатки в значительной степени устраняются в управляемых бесконтактных двигателях постоянного тока, принципиальные схемы и основные характеристики которых рассмотрены в следующем параграфе. 10-13. Бесконтвктный управляемый двигатель постоянного тока Рассмотренные в гл. 6 бесконтактные двигатели постоянного тока в основном предназначены для работы при вполне определенной угловой скорости или при нескольких ее ступенях. Для плавного изменения скорости в широких пределах целесообразно при- менять аналоговый датчик углового положения ротора. Конструктивно бесконтактный управляемый двигатель постоянного тока состоит из двух электрических машин, объединенных в одном корпусе (рис. 10-27). Собственно электродвигатель представляет собой бесконтактную двухфазную синхронную машину с возбуждением от постоянных магнитов. На одном валу с ротором синхрон- 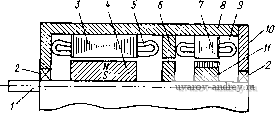 Рис. 10-27. Конструктивная схема бесконтактного управляемого двигателя постоянного тока 1 - вал; 2 - подшипники; 3 - статор; 4 - ротор двигателя; 5 - обмотка статора; 6 - магнитный экран; 7 - статор датчика положения; S - корпус даигателя; S - обмотка статора датчика положения; 10 - подшипниковый щит; 11 - ротор датчика положения типа редуктосина ного двигателя (СД) находится датчик углового положения (ДП). ДП в зависимости от требований, предъявляемых к форме выходного напряжения, выполняется либо в виде бесконтактного СКВТ, либо в виде редуктосина с двумя выходными обмотками, сдвинутыми в пространстве на 90°. СД и ДП отделены друг от друга магнитным экраном. СД и ДП имеют равное число пар полюсов, их двухфазные обмотки статора расположены по отношению к полюсам ротора со сдвигом на 90°. На рис. 10-28 оси обмоток статора СД и ДП совпадают, а полюсы роторов смещены на 90° + 6 (для реверсивных двигателей Э = 0). Принципиальная электрическая схема бесконтактного управляемого двигателя представлена на рис. 10-28. На обмотку возбуждения ДП поступает предварительно усиленный сигнал управления переменного тока. Выходной сигнал ДП поступает на фазочувствительный выпрямитель (ФЧВ). ФЧВ выделяет огибающую, модулированную скоростью вращения вала СД. Напряжения с ФЧВ в виде синусоидального сигнала одной фазы и косинусоидального сигнала второй фазы поступают на входы усилителей мощности, которые включены на 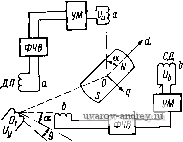 Рнс. 10-28. Структурная схема управляемого бесконтактного двигателя постоянного тока ФЧВ - фазочувствительный выпрямитель; ДП - датчик положения; СД - синхронный двухфазный двигатель; УМ - усилитель мощности обмотки СД. С целью получения высокого КПД и надежности усилители мощности работают в ключевом режиме с широтно-импульс-ной модуляцией (ШИМ). Теория работы такой системы довольно сложна. Удовлетворительное совпадение с опытом дает физическая модель, в которой СД рассматривается при питании от усилителя постоянного тока (УПТ). Усилитель с ШИМ при работе на СД по своим характеристикам эквивалентен УПТ с несколько меньшим напряжением питания. Уравнения ЭДС и электромагнитный момент двигателя можно получить из уравнений ЭДС обобщенной машины, если сделать следующие допущения: 1) падение напряжения на переходах полупроводниковых приборов значительно меньше падения напряжения на статоре СД; 2) магнитная цепь машины не насыщена, и магнитный поток, создаваемый постоянными магнитами, неизменен; 3) влиянием реакции якоря и коммутационных токов на магнитный поток двигателя можно пренебречь. В действительности указанные допущения не всегда выполняются, что приводит к некоторому расхождению теоретических и экспериментальных характеристик двигателя. Составим уравнения ЭДС двигателя. Напряжения, подаваемые на фазы СД, равны Ua=- KaUy sin (а + Э); (/ = Кь Uy cos (а + Э), где Ка Кь - коэффициенты усиления каналов фаз а я Ь, которые в дальнейшем принимаются одинаковыми: Ка = Кь = К- Приводя эти напряжения к обмоткам dug, неподвижным относительно полюсов ротора, получаем Ud=~UsmQ; = cosO, где и = KUy. Уравнения ЭДС СД как обобщенной машины имеют вид d q - f/sine r + Lip -Lg(i>p L LdCOp r + Lgp
(10-64) где - потокосцеплеиие фазы от магнитного потока постоянных магнитов. Момент двигателя M==Wfig + (Ld-Lg)idig. (10-65)- Рассмотрим частный случай установившегося режима неявнополюсного реверсивного двигателя. В этом случае можно принять: сор = const; р = 0; 9 = 0; = = L. Уравнения (10-64) примут вид COpL - cOpL r
(10-66) Решая уравнение (10-66) относительно г, и подставляя в (10-65), получаем M=~~\{U-capf). (10-67)1 В малогабаритных управляемых двигателях ырЬ < г, и уравнение механической характеристики принимает вид 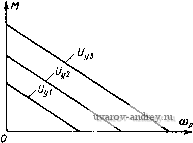 М=-(f/-¥,(Op). (10-68) Рис. 10-29. Механические характеристики управляемого бесконтактного двигателя постоянного тока при г > (OpL Механические характеристики, определяемые формулой (10-68), представляют .собой отрезки прямых (рис. 10-29) с постоянной крутизной, равной Ч'/Уг, т. е. имеют точно такой же вид, как у коллекторных двигателей постоянного тока с якорным управлением. По сравнению с коллекторными двигателями постоянного тока бесконтактные двигатели имеют следующие преимущества: 1) более высокие энергетические показатели; 2) высокую стабильность электромагнитного момента; 3) отсутствие пульсации магнитного потока и связанного с ней реактивного момента; 4) большой диапазон регулирования угловой скорости; 5) отсутствие радиопомех; 6) высокую надежность вследствие отсутствия щеточно-коллекторного узла. 10-14. Совмещенные электрические микромашины Для некоторых специальных устройств автоматики, в которых существенное значение имеют габариты машины и их рациональная компоновка, нашли применение так называемые совмещенные электрические микромашины, выполняющие в пределах активной части несколько функций. К такого рода машинам относятся: асинхронный управляемый двигатель-асинхронный тахогенератор, сельсин-управляемый двигатель, управляемый двигатель-магнитный усилитель, бесконтактный двигатель постоянного тока - тахогенератор и т. п. В настоящем параграфе рассмотрим в качестве примера первые два типа из перечислевных совмещенных электрических машин. Асинхронный управляемый двигатель - асинхронный тахогенератор. Принципиальная электрическая схема совмещенной машины приведена на рис. 10-30. Здесь Bj - обмотка возбуждения управляемого двигателя; Ва - обмотка возбуждения генератора; У - обмотка управления двигателя; Г - генераторная обмотка ТА. Ротор общий и выполнен в виде тонкостенного немагнитного стакана. Для исключения электромагнитной связи между обмотками двухфазный управляемый двигатель и асинхронный тахогенератор выполняются на различное число пар полюсов и располагаются на различных магнитопроводах: обмотки двигателя на внешнем, а генератора - на внутреннем. Конструктивная схема машины соответствует ТА, изображенному на рис. 7-5, в. Частота напряжения питания обмоток двигателя и тахогенератора может быть различной. Объяснить теорию работы этой совмещенной машины не представляет затруднений: в случае ненасыщенного магнитопровода двигатель и тахогенератор могут рассматриваться отдельно. Однако при оптимизации параметров машины возникают определенные затруднения, поскольку требования к ним отличаются для управляемого двигателя и тахогенератора; при проектировании таких машин приходится искать разумное компромиссное решение. Сельсин - управляемый двигатель. Рассматриваемая совмещенная электрическая машина относится к управляемым двигателям с пространственным смещением магнитного потока для управления скоростью и моментом двигателя. Принципиальная конструктивная схема сельсина-двигателя изображена на рис. 10-31 [26]. На статоре 2 размещена трехфазная или двухфазная обмотка синхронизации /; на вращающемся внутреннем магнитопроводе 4 находится обмотка возбуждения 5. В воздушном зазоре между статором и внутренним магнитопроводом расположен тонкостенный ротор S. Ротор и внутренний магиитопровод соединены между собой через понижающий редуктор 6. Сель- Рис. 10-30. Электрическая схема совмещенных асинхронных двухфазных двигателя и тахогенератора О
сии-двигатель в системе синхронной передачи является приемником (рис. 10-32). Принцип его работы состоит в следующем. В согласованном положении (в = 0) в приемнике образуется только продольный магнитный поток от токов, протекающих в обмотке возбуждения f и в обмотке синхронизации D. При повороте ротора датчика иа некоторый угол в под действием ЭДС £ф sin в в поперечном контуре цепи синхронизации появляется ток, который создает поперечный магнитный поток. Если напряжение обмотки возбуждения Uj и ЭДС £ф по фазе не совпадают, то в сельсине-двигателе образуется вращающееся магнитное поле, под действием которого ротор приходит во вращение в через редуктор приводит внутренний магиитопровод в положение, при котором ось обмотки возбуждения совпадет с осью магнитного потока обмоток синхронизации D и Q. Очевидно, что ротор двигателя будет вращаться до тех пор, пока внутренний магиитопровод также не повернется иа угол в. Следует отметить, что при достаточно большом передаточном числе редуктора иа валу приемника можно получить значительно больший момент, чем в обычном сельсине. Однако быстродействие синхронной передачи существенно снижается. Составим уравнения ЭДС и момента совмещенной машины сельсин- управляемый двигатель. Заменяя ротор двумя взаимно перпендикулярными обмотками dug, получим систему из пяти контуров: три контура f, D и d по продольной оси и два контура Q и д по поперечной. Матрица сопротивлений для этих контуров, если считать, что их параметры приведены к одной обмотке (например, /), имеет вид (10-69) где Zf - собственное сопротивление обмотки возбуждения, включая пусковое сопротивление; Zd л Zq - собственные сопротивления обмоток D я q с учетом выходного сопротивления датчика.
Векторы тока и приложенного напряжения равны /о id I, Уравнение ЭДС в матричной форме zi = и- - £ф COS 9 - ёф sinS О О 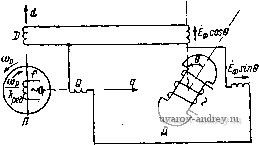 Рнс. 10-32. Электрическая схема синхронной передачи с сельсином-двигателем Полагая Zd= Zq и введя относительные параметры Zp jXm уравнение (10-70) запишем в виде (10-70)
Uf Ёф cos e £ф sin В иым Здесь 1 D Zaf (где Ja,= г+г, + гг,); 1 + г -1 -1 l + k 0 0 D - m - fvzf 1 + г 1 + г 1+г 1 + i ----/р f2 = г,£ф cos e - гг/, + jv sin 6 1+г - iv (kfEi. cos 6 - iUf)+ -i5L 9 1 + г Отсюда окончательно получаем уравнения ЭДС для контуров - V- 1 +г 14г г,£ф cos в - гг/, + / -isL ёф sin в 1 + г - jv (г,£ф cos в - iUf) + £ф g 1 + z . (10-71) Составляющие обобщенного вектора индукции в' находим.как коэффициенты при V в уравнении 2/2 -[/2 = 0. Из (10-71) получаем 1 + г -L. £ф sin 6 1+г А:т-/ + /(г/£фСОзв-гУ/) Момент двигателя будет М = - Re(B,/J = - (О , (О (О + Хт- iJc + / (г/Яф cos 6 - zVf) lg - igh - i -/ёф sin 6 + 1 +г 1 +г (10-72) Формулы (10-71) и (10-72) позволяют при известных относительных параметрах двигателя рассчитать его механические характеристики для любых соотношений между £ф а Uf как по амплитуде, так и по фазе. Решение задачи в общем виде приводит к весьма громоздким выражениям, которые трудно анализируются. Глава одиннадцатая ШАГОВЫЕ ДВИГАТЕЛИ 11-1. Принцип работы. Методы управления Принцип работы шаговых двигателей (ШД) основан на дискретном изменении магнитного поля в рабочем зазоре электрической машины, что достигается импульсным возбуждением (или переключением) ее обмоток. При циклически повторяющихся переключениях обмоток вектор НС статора поворачивается на фиксированные углы (шаги), вызывая поворот ротора ШД на эти же углы. В качестве ШД могут быть использованы различные типы электрических машин: синхронные двигатели с постоянными магнитами, реактивные двигатели, субсинхронные, асинхронные с неполной клеткой на роторе [33], сельсины, редуктосины и т. п. Наиболее полно требованиям быстродействия, устойчивости движения, надежности отвечают многофазные синхронные двигатели с активным или пассивным ротором, а также субсинхронные двигатели. Рассмотрим принцип действия и основные физические процессы в ШД на примере двухфазной двухполюсной синхронной машины с постоянными магнитами. Положим, что намагничивающие силы фаз распределены по синусоидальному закону. При включении фазы А под постоянное напряжение вектор НС статора совпадает с осью фазы А. В результате взаимодействия НС статора с полем  постоянного магнита ротора возникнет синхронизирующий мом пропорциональный sin 6, где 9 - угол между осью полюсов и тором НС: Мс = Ммакс sin 9. При отсутствии тормозного момента ротор займет положение при котором его ось совпадает с осью фазы А (рис. И-1, а). Есл^н теперь отключить фазу А и включить фазу 5, то вектор НС повер^ нется на 90°. В результате возникнет синхронизирующий момент под действием которого ротор также повернется на 90 (рис. 11-1,6) 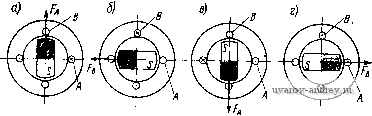 Рис. 11-1. Устойчивые положения ротора при включении фаз; а - фазы i4; б - фазы В; в-фазы А с противоположиои полярностью; г - фазы В с противоположной полярностью При отключении фазы В и включении фазы А с обратной поляр ностью намагничивающая сила и ротор повернутся еще на 90 и т. д. Если к ротору двигателя приложен постоянный момент на- \ грузки, то при переключении фаз ротор будет отставать от вектора' НС на некоторый угол 0 = arcsin (Л1 Ш„акс). а) 5) 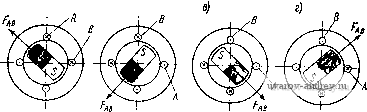 Рис. 1Г-2. Устойчивые положения ротора при включении двух фаз с различным направлением токов: + Л, -f В (а); - А, -\- В (б); -Л,-В(в); + Л.-В(г) Следует отметить, что переход ротора от одного устойчивого положения к другому сопровождается колебаниями, обусловленными инерцией ротора. Эти колебания могут быть особенно значительны при отсутствии тормозного момента на валу двигателя, т. е. в-ре-ншме ходос101Р„ хода. При рассмотренном способе переключения обмоток, который можно представить в виде последовательности +Л, -\-В, -Л, В [знак плюс означает включение фазы с положительным направлением НС, а минус - с отрицательным направлением HCI, шаг двигателя составляет 90°. Этот же шаг двигателя и в ]/2 раз большие значения НС (и соответственно синхронизирующего момента) можно получить при одновременном переключении обмоток в следующей последовательности: (+ Л, + Б), {-А, + В), {-А, - В), (+ Л, - В). НС обмоток и устойчивые угловые положения ротора изображены на рис. 11-2; они смещены по отношению к угловым положениям ротора по первому способу переключения на 45°. Шавигателя можно уменьшить в два раза, если переключение обмоток выполнить в другой последовательности: + Л, (+ Л, + В), + Б, {+ В, - А), - А, (- Л, - Б), - В, (- В, + Л). Направления НС и угловые положения ротора ШД для этого способа переключения изображены на рис. 11-3. Применяемые на практике ШД являются многофазными и многополюсными электрическими машинами. Управление двигателями  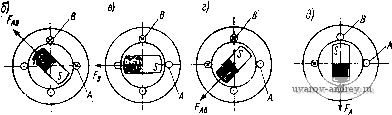 Рис. 11-3. Устойчивые положения ротора при несимметричном управлении В зависимости от типа электронного коммутатора может быть одно-полярным или разнополярным; симметричным или несимметричным; потенциальным или импульсным. При однополярном управлении напряжение на каждой фазе изменяется в пределах от нуля до + f/, а при разнополярном управлении - от - и до -\- и. Управление называется chmmctpjr-ным, если для каждого устойчивого состояния возбуждается одинаковое число обмоток. При возбуждении разного числа обмоток управление будет несимметричным. Способы переключения обмоток ,б1( азанные на рис. 11-1 и 11-2, соответствуют симметричному управлению, а на рис. 11-3 - несимметричному. При потенциальном управлении напряжение на обмотках нз-Щтся тшькб в моменты поступления управляющих импульсов на электронный коммутатор (ЭК). П^)и отсутствии сигнала на входе ЭК обмотка или группа обмоток находится под напряжением и положение ротора фиксируется полем возбужденных обмоток. При^импульснбкруправлении напряжение на обмотку подается только во время подачи команды; по истечении определенного времени обмотка обесточивается и ротор двигателя удерживается в за- данном положении либо реактивным моментом, либо внешним фик-. сирующйм устройством. Для простоты схемы ЭК наиболее удобной является потенциальная схема управления с однополярной коммутацией обмоток. В двухполюсной машине число устойчивых электрических состояний п следующее (т - число фаз): J) при однополярной коммутации и симметричном управлении п = Ш] 2) при разнополярной коммутации с симметричным управлением и при однополярной коммутации с несимметричным управлением п = 2т; 171 = 1 3 \ S г г 5 S 10 5) i у -г Рис. 11-4. Электрические состояния ШД: а - с однополярной коммутацией; б - с разнополярной коммутацией 3) при несимметричной разнополярной коммутации п = 4m. Очевидно, что несимметричная коммутация возможна, если m > 2. На рис. И-4 показаны основные электрические состояния ШД для разного числа фаз при симметричном способе коммутации, ректоры, соответствующие положительной полярности напряжения, обозначены сплошными линиями, а отрицательной полярности - штриховыми. В многополюсной электрической машине число устойчивых электрических состояний возрастает пропорционально числу пар по- машинах с активным ротором р = 2р/2, а в машинах с реактивным ротором р = Zp, так как повороту ротора на одно зубцовое деление соответствует изменение электрического состояния на 360°. 11-2. Величины, характеризующие работу ШД При работе ШД в системах дискретного электропривода он характеризуется рядом величин, определяющих возможности , его применения. Рассмотрим эти величины. Механический шаг двигателя - угол между двумя соседними устойчивыми состояниями а„ = 2я/(пр). (П-1) Этому углу соответствует поворот вектора НС обмоток на угол аэ=ра =2п/п. (П-2) Статический синхронизирующий момент. Зависимость этого момента, развиваемого двигателем, от угла отклонения ротора от устойчивого положения Эм для ШД с симметричным ротором близка к синусоиде (рис. 11-5, а): N (е„) = -M aKcSin р0 = -M aKcSin 6. а) 5) (11-3)
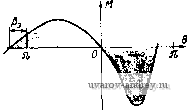 Рис. 11-5. Статический синхронизирующий момент: а - для симметричного ротора; б - для несимметричного (клювообразного) ротора В ШД с клювообразным (несимметричным) ротором кривая синхронизирующего момента несимметрична (рис. 11-5, б). Полуволны кривой Л1 (Э), оставаясь равновеликими по площади, имеют различную протяженность: по оси 6 длительность ускоряющей полуволны я -f Рэ. а тормозящей л - Рэ, где Рэ - угол смещения кривой. В общем случае при любой форме ротора синхронизирующий шмент^двигателя можно определить как производную электромагнитной энергии ШД по углу отклонения ротора от устойчивого положения М(0 )=4=р^. (11-4)
Рис. 11-6. к определению пускового момента ШД Пусковым моментом называется максимальный момент нагрузки, при котором двигатель в очередном цикле коммутации вращается без потери шага. Нетрудно видеть, что этот момент равен ординате точки пересечения кривых синхронизирующего момента для двух соседних устойчивых состояний У и 2 (рис. 11-6). При аэ = я момент Мп=0 для симметричного ротора и МпО для клювообразного ротора. Отсюда следует: 1. При т == 1 (однофазная обмотка) возможно осуществить ШД только при разнополярной коммутации [п = 2т) и несимметричном клювообразном роторе. 2. При m = 2 (двухфазная обмотка) ШД с симметричным ротором возможен при разнополярной симметричной коммутации и однополярной или разнополярной несимметричной коммутации. Двухфазный двигатель с однополярной симметричной коммутацией работать не будет. 3. При т > 3 возможна реализация ШД при любом виде коммутации. Зоной статической устойчивости называется интервал угловых положений ротора, в пределах которого ротор возвращается в исходное положение; эта зона простирается от (- я) до я для двигателя с симметричным ротором и от - я-рэ до я-Рэ для двигателя с клювообразным ротором. Зона динамической устойчивости определяется с учетом сдвига кривой синхронизирующего момента при очередном такте переключения обмоток: она простирается от - я -f э до - (я + аэ) для- ШД с симметричным ротором и от - я-Рэ + э до л - Рэ + э для ШД с клювообразным ротором. Частотой приемистости называется наибольшая частота импульсов, отрабатываемых двигателем без потери или добавления шага при пуске из режима фиксированной стоянки под ( током и останове. Частота приемистости при нулевом моменте на-\ грузки и номинальном моменте инерции нагрузки называется максимальной. Частота приемистости зависит от динамической добротности ШД, определяемой как отношение MJJ, а также от электромагнитной постоянной времени обмоток. Электромагнитная постоянная времени обмоток ШД определяется как отношение полной индуктивности соответствующей обмотки к ее активному сопротивлению. В ШД с активным ротором постоянные времени обмотки сравнительно невелики, так как индуктивность обмотки в момент включения определяется главным образом магнитными потоками рас- сеяния. В ШД индукторного и реактивного типов индуктивности обмоток значительно больше, а кроме того, они зависят от углового положения ротора. Обычно в ШД для уменьшения электромагнитной постоянной времени последовательно с обмотками включаются добавочные сопротивления Гдоб с одновременным увеличением (форсировкой) пpJлoжeннoгo напряжения. Отношение фор = (ф + гдоб) ф называется коэффициентом форсировки; здесь Гф - сопротивление фазы. При включении добавочного сопротивления электромагнитная остоянная времени находится по формуле /доб + Гф (11-5) Собственной частотой колебаний о называется угловая частота колебаний ротора ШД около устойчивого положения при отсутствии момента нагрузки. Она находится из дифференциального уравнения движения ротора sin /?Э„ = 0. Считая 0м малой величиной и деля члены уравнения на J, получаем Э„+ максР Qo Отсюда находим ©0= Ум макс ри. (11-6) Знание этой величины необходимо для определения частоты управляющих импульсов, при которой возможен резонанс и, как, следствие, выпадение ШД из синхронизма. Степень демпфирования колебаний ротора ШД зависит от момента сопротивления (сухого трения) и внутреннего электромагнитного демпфирования, обусловленного преобразованием механической энергии ротора в электромагнитнюу с последующим ее рассеянием в теплоту в активных сопротивлениях обмоток. Электромагнитный момент ШД в общем случае состоит из двух частей: синхронного момента, зависящего от рассогласования осей НС статора и ротора, и асинхронного (тормозного) момента, пропорционального угловой скорости. M=-МмаксЗШе -D- Параметр D называется коэффициентом внутреннего демпфирования. Внутреннее демпфирование следует учитывать только в ШД с активным ротором. Механической характеристикой ШД называется зависимость момента, развиваемого двигателем, от частоты управляющих импульсов. Она имеет падающий характер (рис. И-7). Рис. 11-7. Механическая характеристика ШД С ростом частоты сказывается запаздывание в,нарастании тока, обусловленное индуктивностью обмоток. При некоторой предельной частоте / р момент двигателя становится равным нулю. 11-3. Характер движения ротора. Режимы работы ШД Вследствие значительной инерции ротора и слабого внутрен него демпфирования движение ротора ШД обычно сопровождается колебаниями около положений устойчивого равновесия. При пе- 
Рис. 11-8. К определению характера движения ротора ШД реключении обмоток к ротору двигателя подводится не только энергия для соверщения полезной работы, но и некоторая избыточная энергия, которая увеличивает кинетическую энергию ротора. Избыточная энергия зависит от углового положения ротора по отношению к новому устойчивому состоянию лосле переключения обмоток. Наибольшие качания ротора могут возникнуть, если частота переключения обмоток совпадает с собственной частотой колебаний ротора. Рассмотрим характер движения ротора при различных условиях работы ШД, считая, что внешняя нагрузка и внутреннее демпфиро- вание малы. При подаче первого импульса (первое переключение обмоток) кривая синхронизирующего момента 1 смещается на угол аэ, т. е. на шаг (рис. П-8). При втором переключении обмоток эта кривая смещается в положение 2. Под действием синхронизирующего момента ротор двигателя начинает движение и в силу инерции будет совершать затухающие колебания около нового положения равновесия, смещенного также на угол осэ. Минимальное время tr необходимое для поворота ротора на шаг, приближенно равно V4 периода собственных колебаний: t - J-T - (П-7) В действительности, вследствие качаний ротора это время зна чительно больше. Качания ротора, сопровождающие отработку одного шага, можно устранить с помощью специального старто-стопного метода управления. Проанализируем характер движения ротора, если последующий сигнал управления поступает, когда колебания ротора еще продолжаются. Энергия, передаваемая ротору, будет минимальна если второй управлякщий импульс подается в момент времени ti = 2 . Энергия, вводимая в другие моменты времени, будет возрастать. В зависимости от передаваемой ротору энергии можно указать следующие диапазоны частоты управляющих импульсов: 1) высвкие частоты = 4/о; 2) оптимальную частоту f = 1/(2 = 2/о; 3) резонансную частоту / 1/(4< ) = f, 4) частоту единичных команд 1/усп, где усп - время успокоения колебаний ротора. В области высоких частот ротор ШД в процессе пуска сначала запаздывает относительно поля статора; с каждым тактом коммутации в систему вводится механическая энергия и скорость ротора непрерывно возрастает. Если максимальное рассогласование магнитных осей статора и ротора не превосходит полюсного деления, то ротор входит в синхронизм. При частоте управляющих импульсов / = 2/о каждая последующая команда не вносит дополнительной энергии в систему так как к моменту поступления очередной команды (t = 2Q ротор ШД находится в состоянии устойчивого равновесия. Очевидно что режим работы ШД на двойной резонансной частоте управления, обеспечивает наименьшую динамическую погрешность привода. Поэтому эту частоту можно назвать оптимальной частотой для: слабонагруженных ШД. При резонансной частоте управляющих импульсов энергия, передаваемая к ротору, максимальна, что приводит к быстрому возрастанию амплитуды качаний и выпадению ротора ШД из синхронизма. Для исключения этого явления к ротору двигателя должен: быть приложен тормозной момент сухого трения. При подаче единичных команд с частотой /<1/усп движение ротора начинается при нулевых начальных условиях и в зависимости от момента сухого трения и коэффициента внутреннего демпфирования может быть колебательным или апериодическим. 11-4. Констру1аивные схемы ШД ШД с активным ротором. Шаговые двигатели этого типа конструктивно мало чем отличаются от синхронных двигателей с постоянными магнитами: они не имеют пусковой беличьей клетки 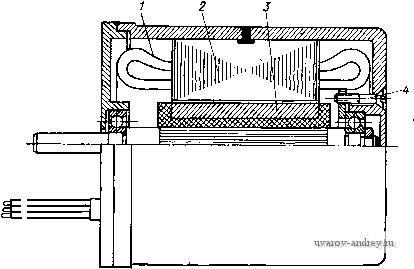 Рнс. 11-9. Однопакетный ШД с возбуждением от постоянных магнитов / - обмотка статора; 2 - пакет статора; 3 - постоянный магнит; 4 - регулировочный на роторе, выполняются в виде многополюсной машины с минимальным возможным диаметром ротора. Чисдо пар полюсов с целью уменьшения шага выбирается максимальным возможным исходя их технологических соображений и допустимых магнитных потоков рассеяния между полюсами. Выпускаемые серийно ШД с активным ротором имеют шаг от 90 до 15°. Обмотка статора выполняется как двухфазная расщепленная, при которой возможно управление от четырехтактной схемы с однополярной коммутацией. В некоторых типах ШД применяется трехфазная обмотка. На рис. 11-9 приведен общий вид однопакетного ШД с возбуждением от постоянных магнитов. Ротор ШД обычно выполняется в виде звездочки без полюсных наконечников. Иногда вместо постоянного магнита применяют ротор, изготовленный из материала с широкой петлей гистерезиса; в этом случае шаг двигателя определяется числом пазов на статоре. Индукторные ШД являются модификацией индукторных синхронных машин с числом фаз m = 2-4. Они имеют шаг 15° и менее и частоту приемистости до нескольких килогерц. Индукторный ШД имеет зубчатый ротор с равномерно расположенными Zp зубцами и гребенчатые зоны статора, смещенные относительно друг друга на угол 2n/(mzp). Обмоткой возбуждения ШД являются фазные обмотки или специальные контуры, имеющие постоянное потокосцеплеиие, не зависящее от положения ротора. Существует много 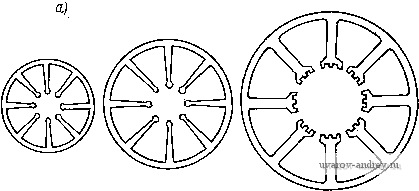 ft IS @ О О Со  1. I 5 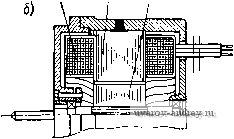 Рис. 11-10. Индукторный ШД с самовозбуждением: а - геометрия магнитной цепн; б - конструкция двигателя / - обмотка возбуждения; 2 - пакет статора; 3 - зубчатый ротор модификаций индукторных ШД, которые различаются: 1) по числу фаз и размещению обмоток (на спинке или на полюсах статора); 2) по виду возбуждения (независимое или с самоподмагничиванием); 3) по числу пакетов статора; 4) по способу фиксации ротора в обесточенном состоянии; 5) по характеру замыкания магнитного потока возбуждения. Рассмотрим особенности конструкции и основные соотношения для индукторных ШД с самоподмагничиванием. Эти двигатели 1 ... 13 14 15 16 17 18 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |