


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 ... 12 13 14 15 16 17 18 ставленных на рис. 10-5: с короткозамкнутым ротором типа беличьМ клетки; с полым немагнитным ротором; с ферромагнитным омедненным или неомедненным ротором. Управляемые двигатели третьего Типа имеют сравнительно низкие энергетические показатели и относительно большую электро- Рис. 10-5. Типы конструкций ротора двухфазного управляемого двигателя: а - беличья клетка ; б - полый немагнитный ротор; в - ферромагнитный омедненный ротор; г - ферромагнитный ротор механическую постоянную времени; это существенно ограничивает область их применения. Двигатели первых двух типов широко используются в автоматике. Первоначально в отечественном приборостроении наиболь- 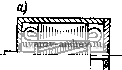 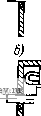 !.taii!!SI 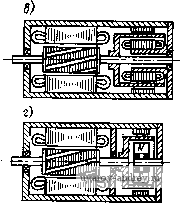 Рис. 10-6. Конструктивные схемы модификаций управляемого двухфазного двигателя с ротором беличья клетка : а - обычный двигатель; б - двигатель с электромагнитным демпфером; в - с демпфирующим тахогенератором; г - с инерциальным демпфером шее распространение получили управляемые двигатели переменного тока с полым немагнитным ротором. Это объясняется тем, что первые типы управляемых двигателей были относительно больших габаритов (диаметр корпуса Dk>80 мм); у них, как показывают расчеты, лучшие энергетические показатели при меньшей электро- 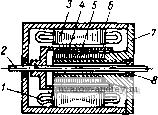 Рис. 10-7. Конструктивная схема управляемого двигателя с полым немагнитным ротором ; обмотка; 2 - вал; 3 - внешний магиитопровод; 4 - внутренний магиитопровод; 5 - полый немагнитный ротор; 6 - корпус; 7 - крышка; 8 - подшипник механической постоянной времени, если ротор выполнен в виде полого немагнитного стакана. Для машин меньших габаритов (Dk<c60 мм) управляемые двигатели с ротором типа беличьей клетки по своим рабочим характеристикам превосходят двигатели с полым немагнитным ротором. Поэтому двигатели первого типа наибольшее распространение получили в маломощном приводе. Двухфазные управляемые двигатели с ротором типа беличьей клетки выполняются в следующих модификациях: обычный управляемый двигатель; двигатель с электромагнитным демпфером; с демпфирующим тахогенератором; с инерциальным демпфером. Все перечисленные типы машин могут выполняться со встроенным механическим редуктором. На рис. 10-6 приведены принципиальные конструктивные схемы двигателей указанных модификаций. Отличительными конструктивными особенностями управляемых двигателей с ротором типа беличьей клетки по сравнению с обычными асинхронными двигателями являются: а) малый диаметр расточки с целью уменьшения момента инерции ротора (1/D 1,5 -т-2); б) минимальный воздушный зазор (б = 30-50 мкм); в) относительно большое для данных габаритов число пар полюсов (р = 2-г-4); г) скос паза ротора на одно-два зубцовых деления с целью уменьшения реактивных моментов и высших пространственных гармоник; д) сквозная конструкция, обеспечивающая необходимую технологическую соосность; е) закрытое исполнение машины. Управляемые двигатели с полым немагнитным ротором (рис. 10-7) имеют магиитопровод статора, состоящий из двух сердечников: внутреннего и внешнего: немагнитный промежуток в машине достигает больших значений (0,5-1,0 мм); ротор выполняется в виде тонкостенного стакана из легкого алюминиевого сплава. Обмотки двигателя обычно располагаются на внешнем магнитопроводе. Отличительные особенности двигателей этого типа - отсутствие реактивных тормозных моментов и малый момент инерции ротора. 10-3. Величины, характеризующие работу двухфазного управляемого двигателя Асинхронные двигатели общего,применения, работающие обычно при номинальной угловой скорости и постоянном или переменном моменте нагрузки, характеризуются такими величинами, как номинальная угловая скорость, полезная мощность на валу, КПД, cos ф и т. п. (см. § 3-2). Для управляемых двигателей указанных показателей работы недостаточно, так как в большинстве случаев они имеют второстепенное значение и не могут характеризовать работоспособность двигателя в схемах приборной автоматики. Это объясняется тем, что для управляемых двигателей основным режимом работы является пусковой, а рабочие свойства двигателя должны выбираться исходя из быстродействия и устойчивости работы автоматических систем, в которых они применяются. Это заставляет работу управляемых двигателей переменного тока характеризовать рядом специфических величин, которые кратко рассматриваются ниже. Для конкретности все величины даны применительно к амплитудному управлению. Самоходом управляемого двигателя называется самопроизвольное вращение ротора двигателя при однофазном включении (напряжение на управляющей обмотке равно нулю); это явление для управляемого двигателя нежелательно. Различают параметрический и технологический самоход. Параметрический самоход обусловлен малым активным сопротивлением ротора, поэтому с целью его устранения управляемые двигатели выполняют с повышенным активным сопротивлением ротора. Как показано в § 10-6, для исключения самохода при разомкнутой обмотке управления необходимо, чтобы активное сопротивление ротора было не меньше его полного индуктивного сопротивлейия {г > Хт + X,). При замкнутой обмотке управления самоход отсутствует при значительно меньшем сопротивлении ротора. Технологический самоход вызывается паразитными коротко-замкнутыми витками в магнитопроводе или обмотке. Вследствие этого двигатель может рассматриваться как однофазный асинхронный двигатель с экранированным полнхом. Пусковым моментом М„ называют момент, развиваемый двигателем в стопорном режиме при номинальном напряжении возбуждения и подаче на обмотку управления некоторого управляющего напряжения. Для ненасыщенных машин Мп = k Uy, (10-1) где ku - коэффициент управления двигателем по моменту. Выражение для пускового момента при амплитудном способе управления может быть записано в несколько ином виде: M,k,UfUy=kpVp;p;, (10-2) где Pf и Ру - мощности, потребляемые обмотками возбуждения и управления; ku - коэффициент пропорциональности; kp - коэффициент управления двигателем по мощности. Коэффициент kp является одной из важнейших величин, характеризующих работу управляемого двигателя; обычно его определяют по номинальным данным при симметричном режиме питания: ftp = M (10-3) где Рд1 = Pffj ~ Ру14 - номинальные мощности возбуждения и управления в пусковом режиме. Для оценки пусковых свойств двигателя вводят удельный пусковой момент, т. е. момент, приходящийся на ватт потребляемой мощности, Шп = ftp/2. Можно указать на зависимость удельного пускового момента от числа пар полюсов р и частоты сети f: М„ = Р,1,/<Ис, (10-4) где Рзк - электромагнитная мощность, передаваемая со статора на ротор; (Ос = 2nf/p - синхронная угловая скорость поля. 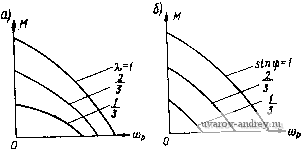 Рис. 10-8. Механические характеристики управляемых двигателей: о - при амплитудном способе управления; б - при фазовом способе Но Рзд| = т)э-2Рд где величина Цэ может быть названа электромагнитным КПД; эта величина падает с увеличением числа пар полюсов, растет с увеличением частоты / и зависит от габаритов двигателя. Согласно двум последним формулам 2Pn 2nf (10-5) Из этого выражения следует, что для заданного габарита двигателя при фиксированной частоте сети можно определить число пар полюсов, при котором удельный пусковой момент имеет наибольшее значение. Формула (10-2) позволяет оценить изменение пускового момента при неравномерном распределении мощностей между обмотками. Пусть Pf = PN± АР; Ру = Pj, q= АР; тогда М„ = Мп/1-(АР/Рл,) (10-6) Механической характеристикой двигателя называется зависимость момента на валу от угловой скорости ротора при номинальном напряжении возбуждения и заданном коэффициенте управления. Семейства механических характеристик управляемых двигателей переменного тока при амплитудном и фазовом методах управления представлены на рис. 10-8. При фазовом управлении крутизна механических характеристик не зависит от коэффициента управления sin ijj, а при амплитуднснй управлении она изменяется пропорционально величине 0,5 (1 + Я,*) (см. § 10-6), так что при малых управляющих напряжениях крутизна механической характеристики примерно в два раза меньше, чем при номинальном управляющем напряжении. Механические характеристики управляемых двигателей должны иметь падающий характер, т. е. dM/d(Op<:0, а форму - близкую к прямой. Уравнение механической характеристики идеального управляемого двигателя имеет вид M = Mn-F(Op, (10-7) 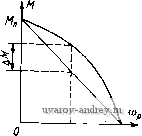 Рис. 10-9. К^определе-нию нелинейности механической характеристики управляемого двигателя 0,625 0,600 0,575 0,550 0,525 0.500. О 0,1 ОЛ 0,3 0,4 0J5 Рис. 10-10. Зависимость Vm от нелинейности механической характеристики ц где^Р = Мп/сйро - величина, определяющая крутизну механической характеристики; она называется коэффициентом внутреннего демпфирования; - угловая скорость холостого хода. Одна из важнейших особенностей механических характеристик управляемых двигателей переменного тока состоит в том, что они принципиально нелинейны. Нелинейность механических характеристик зависит от активного сопротивления ротора: с увеличением его нелинейность уменьшается. Нелинейность механической характеристики оценивают степенью нелинейности [г, определяемой как отношение максимального отклонения момента от линейной зависимости к пусковому моменту (рис. 10-9): х = ДМШп. В первом приближении механические характеристики управляемого двигателя можно заменить отрезками парабол. Для механической характеристики, соответствующей номинальному режиму работы, получим m=l--a--dw (10-8) где m = М/М„ц - относительный момент; о = Юр/ос - относительная угловая скорость; cud - постоянные, которые опреде- ляются через степень нелинейности ц. При и = 1, /и = 0 имеем с -1- d = - 1; при t> = Va, m = + имеем d + 2c = - 2 отсюда с = 4(1-1; d = - 4л. Тогда уравнение (10-8) запишется в виде т=1-(1-4(г)и-4(гу (10-9) Для обеспечения падающего характера механических характеристик при всех значениях v необходимо, чтобы (i.<V4. Обычно степень нелинейности механических характеристик не превосходит 10-15 %. Развиваемая дбигателем полезная мощность, выраженная в относительных единицах, определяется формулой Р2 = ти = у-(1-4(i)y-4ли (Ю-10) Полезная мощность на валу двигателя максимальна при относительной скорости = (4x-1 -f /T6fi -f 4fi -f 1 )l(\2]i). (10-11) Ha рис. 10-10 приведен график зависимости Vm от \i. Если обозначить через Ргмакс максимальную полезную мощность на валу при ]1 = О (линейная механическая характеристика), то максимальная полезная мощность при О может быть описана следующим приближенным выражением: Р2 акс=Р2°макс(1+ад. (10-12) Формула (10-12) позволяет установить простое соотношение между пусковым моментом двигателя и номинальной полезной мощностью: м пЛГ ; = -4-(1+2ц.)Мпдг(Ос. 4 (10-13) Напряжением трогания i/y.xp называется нимальное напряжение на обмотке управления, при котором двигатель вращается с наименьшей (ползучей) скоростью. Очевидно, что напряжение трогания тем выше, чем больше реактивный момент двигателя Мр и момент трения в подшипниках Мпш: (10-14) Мр + М„ ш и у. тр Л1пЛГ UyN Момент трения в подшипниках можно определить по минимальным напряжениям возбуждения Uf ин и управления U у. мин = = 90°), при которых двигатель вращается с ползучей скоростью, по формуле Мпш UfbimUy.uhb (10-15) MnN UfNUyN 10* 291 Выражения (10-14) и (10-15) дают возможность оценить реак- тивный момент двигателя, обусловленный электрической и маг- нитной асимметрией его ротора. Из динамических постоянных управляемых дви- гателей выше были рассмотрены две: коэффициент управления дви-i гателем по моменту ku и коэффициент внутретнего демпфирования F. Для определения остальных динамических постоянных обра- тимся к уравнению движения ротора двигателя без нагрузки р (и M -Fw р> (10-16) где Jp - момент инерции ротора двигателя. - 4 4 Н Рис. 10-11. Управляемый двигатель с инерционной нагрузкой Выражая М„ по формуле (10-1), уравнение (10-16) перепишем в виде dt P- У Разделив правую и левую части этого уравнения на F, получим dap P = 6)ty, (10-17) Коэффициент fte = где r = JplF = Jp(aJM ij -электромеханическая постоянная времени; ft = А = i коэффициент управления г иу М„ иу двигателем по скорости, который характеризует изменение угловой скорости двигателя при увеличении управляющего напряжения на 1 В. -- = -Г-Г- =- называется коэффи- Jp UyJp и у циентом управления двигателем по ускорению; он характеризует угловое ускорение, получаемое ротором двигателя при подаче управляющего напряжения 1 В. Из формулы (10-17) находим передаточную функцию двигателя Я(р)=-£=-. (10-18) Максимальное угловое ускорение инерционной нагрузки. В большом числе случаев управляемый двигатель в приборных системах работает через редуктор на инерционную нагрузку (рис. 10-11). Угловое ускорение, получаемое нагрузкой в пусковом режиме, 6 1 Мп м„ е„ = ---=--, (10-19) где Ун - момент инерции нагрузки; йред - передаточное число редуктора. Решая уравнение Ен/ред = О, найдем передаточное число редуктора ред = У JJJp и соответствующее ему максимальное угловое ускорение инерционной нагрузки ен. акс = -Е^- (10-20) 2Уй УТр Отсюда следует, что двигатель, обладающий наибольшим отношением M%lJp, создает максимальное ускорение на нагрузке. Рабочими характеристиками управляемого двигателя называются зависимости угловой скорости йр, полезной мощности Р^, потребляемых мощности Pi и тока 1, коэффициента полезного действия Т1 и коэффициента мощности cos ф от момента на валу двигателя при номинальных напряжениях возбуждения и управления. Примерный вид этих характеристик приведен на рис, 10-12. 10-4. Уравнения ЭДС и электромагнитного момента Уравнения ЭДС и момента управляемого двухфазного двигателя получаются из уравнений ЭДС идеализированной электрической машины при условии, что сопротивление взаимной индукции по продольной и поперечной осям одинаковы {Xmd = Xmq = ХтУ- 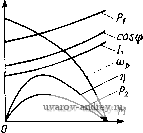 Рис. 10-12. Рабочие характеристики двухфазного управляемого двигатели при круговом вращающемся магнитном поле t У d Я rf + jXfs + jXm О jXm VXm У О y+jys + JXm - VXm }Xm jXm 0 r+}Xs + IXm V (Xm + s) - v(Xm + Xs) r + }Xs + }Xm J
M = -Re{lfig-iyfa)- ©0 (10-21) (10-22) 293 Здесь в отличие от уравнений обобщенной электрической машины величины, относящиеся к обмоткам статора (обмоткам возбуждения и управления), обозначены индексами / и у ; параметры всех обмоток, токи и напряжения приведены к обмотке возбуждения. Исключая из уравнений (10-21) токи if и /у. придем к более простой системе Хт Цр -f iif) id - viyig] = Ef + jvEy-, , Xm Hfid + (P + iiy) /<,] = - ivEf + Ёу-, i M = - Re (jEflg ~ jEyJa Xmifidh - Xmiyljd) . с (10-23) (10-24) Здесь величины p, if и у представляют собой безразмерные параметры двигателя, определяемые по формулам: П + jxfs П + jXfs + jXm х„ у + /*ys + 1х Ef= - jXm rf + ixfs+jxm £у= -jx Гу + ixys + JXm (10-25) (10-26) Напряжения Ef и Ey имеют простой физический смысл: оии равны трансформаторным ЭДС, индуцируемым в обмотках ротора со стороны обмоток возбуждения и управления, при условии, что обмотки ротора разомкнуты. Решая Уравнения (10-23) относительно токов и и подставляя в формулу (10-24), получаем где М = Mf-\-My-]-Mfy, P4S(l-.2)-p2]; My = с1 ДРт с| ДРт p.[Sf(i-.)-p]: (10-27) (10-28) (10-29) 2Р с1 А| Re [/р^ + Р (1 - v) (у-if) + Й,у(1 - v)] EfEy; (10-30) А = Р' + /Р (If + у) - Ifly (1 - ). (10-31) Составляющая электромагнитного момента Mf представляет собой момент, развиваемый двигателем при включении в сеть только обмотки возбуждения; составляющая My появляется только при включении обмотки управления. Составляющая электромагнитного момента Mfy - результат взаимодействия магнитных потоков, создаваемых одной из обмоток, с токами в роторе, индуцируемыми другой обмоткой. Из полученных выражений (10-27) - (10-31) нетрудно иайти уравиеиня идеализированных механических и регулировочных характеристик для различных режимов работы управляемого двигателя (характеристики мы называем идеализированными, так как в иих не учтены потери холостого хода), 10-5. Однофазное аключение при включении в сеть только обмотки возбуждения момент, развиваемый двигателем, определяется по формуле (10-28). Как уже указывалось, одним из важнейших требований, предъявляемых к управляемому двигателю, является отсутствие самохода; для этого необходимо выполнение условия или Гу + jXys Гу + IXys + iXm Хт (10-32) Если обмотка управления разомкнута (гу = оо), то условие (10-32) сводится к неравенству г^ХтЛ- Xg. При замкнутой накоротко обмотке управления, что соответствует управлению двигателем от усилителя с малым выходным сопротивлением, условие отсутствия самохода выполняется при меньшем активном сопротивлении ротора, которое находится из соотношения (10-32). Если в обмотку управления включена емкость, то условие отсутствия самохода примет вид Гу + 1 Xys-h Хт- (10-33) при емкостном сопротивлении 1/(а)С) = Xys + Хт ч малом Гу это условие будет выполняться только при значительном активном сопротивлении ротора. Отсюда следует, что включение емкости в цепь управления может привести к параметрическому самоходу. 10-6. Механические характеристики В общем случае управление двигателем производится посредством изменения как амплитуды, так и фазы управляющего напряжения Uy = Wfe-i- (10-34) При = я/2 и изменении Я получаем амплитудный способ управлепия двигателем, а при Я. = 1 и изменении - фазовый способ. Положим, что приведенные значения параметров обмоток возбуждения и управления одинаковы, т. е. If = gy = I; это равенство для относительных параметров обмоток выполняется достаточно хорошо. Тогда с помощью выражений (10-27) - (10-31) получим с I А Р Хт {(1 + Я2) [2 (1 - У*) - Р^] О + 2Я [р2 + (1 - v) (2 - -2Р Im i)]sin (10-35) Пусковой момент двигателя, соответствующий номинальному режиму работы, получается из (10-35) при Я = 1, sin if = 1 н о = 0: £2Р Ап PJfm c (P + -2pim), где А„ = + /2р|-6 В управляемых двигателях, имеющих повышенное сопротивление ротора, можно принять, что 6 С Р^; в этом случае Пренебрегая величиной * и выражая электромагнитный момент в долях пускового: /Пэ = М1М„и, получим приближенную зависимость электромагнитного момента от коэффициентов управления Я, и sin ф и относительной скорости ротора /Лз = Я, sin ф 1 + Х,2 ак sin ф 2 2(1 +а) 1+а (10-36) где 21ml Формула (10-36) показывает, что приближенные, идеализированные иеха1ические характеристики управляемых двигателей представляют собой отрезки парабол. Из выражения (10-36) нетрудно показать, что нелинейность  4(1+а) г (2г) -- (10-37) (rflxm) + (1 + хфт) + 2г,/г Как видно из этой формулы, нелинейность зависит от отношения rfir, в частности, она возрастает с увеличением активного сопротивления источников питания управляемого двигателя и ие зависит при сделанных допущениях от индуктивного сопротивления рассеяния ротора. Для уменьшения нелинейности механических характеристик до значений, не превышающих 0,1, активное сопротивление ротора управляемых двигателей выбирают в пределах (1,5-2,0) Хт-Используя (10-37), уравнение механической характеристики управляемого двигателя запишем в виде Рис. 10-13. К определению тормозного момента управляемого двигателя на холостом ходу тз = Я,з1пф -(I -4ц) у - 4цЯ, sin фо (10-38) Приведенные приближенные выражения для расчета механических и регулировочных характеристик управляемых двигателей при различных методах управления дают вполне удовлетворительную сходимость с опытными данными при введении поправок на потери холостого хода. Вследствие трения в шарикоподшипниках, вентиляционных потерь и влияния тормозных моментов от высших пространственных гармоник поля скорость холостого хода управляемого двигателя даже при круговом полеКчто соответствует коэффициентам управления, равным единице) меньше синхрониой скорости; обычно t o 1 0.75 -т- 0,9. Тормозной момент при этой скорости может быть найден с помощью идеализированной механической характеристики (рис. 10-13): /п,о (о) - = /Пвд (t o)- Для управляемых двигателей сравнительно низких скоростей с достаточной точностью примем L fо (1 - 4(i) - 4ц1)о Тогда для реальной механической характеристики управляемого двигателя получим приближенное выражение Чр = 1 - ---4р,Ро V - 4цу2 10-7. Выбор емкости для цепи возбуждения В ряде практических схем фазовый сдвиг между напряжениями возбуждения и управления достигается с помощью конденсаторов, включаемых в цепь возбуждения, как указано на рис. 10-14. Пусть Zfe * - полное сопротивление обмотки возбуждения при неподвижном роторе. Найдем емкости Q и С^, при которых напряжение на обмотке возбуждения равно КО, где U - напряжение сети, равное максимальному напряжению на обмотке управления; К = = Wflwy - коэффициент трансформации обмоток возбуждения и управления. Для цепи обмотки возбуждения на рис. 10-14 имеем или 1 + ZfjmC Рис. 10-14. Емкостный делитель в цепи возбуждения управляемого двигателя Приравнивая вещественные и мнимые части, находим С,(- 1)-С,= - sintj) cosф ZfCO к ZfO) /С cos ф 2(0 sin ф siпфsinф -(К -cosф)cosф * ~ Zf(o sin ф (10-39) В частном случае, когда обмотки возбуждения и управления одинаковы, круговое поле будет при /С = 1, = л/2; тогда 2/(0 Zfa Можно поставить задачу несколько иначе: определить коэффициент трансформации К, при котором достаточно только одной емкости Ci (С2 = 0) для получения угла гр, равного 90°. Из уравнений (10-39) определяем при Cg = 0: C=tgф; Zf(d что совпадает с выражениями, полученными в § 3-6. 10-8. Схемы замещения no.nnt1 замещения двухфазного управляемого двигателяполучается непосредственно из схемы замещения обобщенной электрической машины приведенной на рис. 1-7. если положить Up = Vf, On = Uy. В обозначениях принятых в настоящей главе, схема замещения изображена на рис 10-15 При преобразовании звезды активных сопротивлений в треугольник получим схему замещения, приведенную на рис. 10-16. 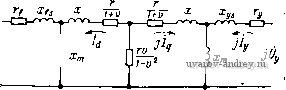 Рис, 10-15. Эквивалентная схема двухфазного управляемого двигателя 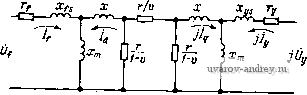 Рис. 10-16. Преобразованная эквивалентная схема двухфазного управляемого двигателя Рис. 10-17. Эквивалентная схема с емкостным делителем в цепи возбуждения С помощью схемы замещения можно моделировать работу управляемого двигателя и определять его характеристики при включенной в цепь возбуждения емкости (рис. 10-17). Аналитические методы определения характеристик в этом случае приводят к трудоемким расчетам 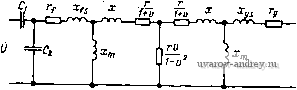 10-9. Оптимизация параметров двухфазного управляемого двигателя Поскольку одним нз основных режимов работы управляемого двигателя является пусковой режим, то необходимо прежде всего обеспечить наилучшие характеристики двигателя в этом режиме. Качество управляемого двигателя в пусковом режиме принято оценивать пусковым моментом, прихо- дящимся на ватт потребляемой мощности при номинальных напряжениях возбуждения и управления, соответствующих круговому вращающемуся магнитному полю. Пусковой момент (10-41) где Pp. п - мощность, рассеиваемая при пуске в роторе двигателя. Мощность, потребляемая двигателем в пусковом режиме, Яп = с. п + Pp. п + Рот. где Рс. п - потери в медн статора двигателя; Яст - потери в стали. В первом приближении при оценке оптимальных свойств двигателя потерями в стали до частот 400-500 Гц можно пренебречь; тогда удельный пусковой момент запишем в виде М„ р 1 ?fs ~ Р„ ~ 2я/ 1 + Рс. JPp. п (10-42) Из схемы замещения двигателя для кругового вращающегося магнитного поля (рис. 10-18) находим Рс.п rf -р.п jXm (г + jXs) r + j(Xm+ s) = -!! r L\ Подставляя это выражение в формулу (10-42), получаем Р 1 Рис. 10-18. Эквивалентная схема управляемого двигателя в пусковом режиме при круговом вращающемся поле ГПп 1 + - (10-43) Эта формула показывает, что удельный пусковой момент является функцией, зависящей от параметров обмоток двигателя и числа пар полюсов. Поскольку характер этой зависимости и условия, прн которых тп имеет максимальное значение, различны для наиболее распространенных типов управляемых двигателей (с ротором типа беличьей клетки, с полым немагнитным ротором), то анализ оптимальных соотношений в двигателях целесообразно выполнить отдельно для каждого нз этих типов машин. Двигатель с ротором типа беличьей клетки. Считая все параметры двигателя, кроме активного сопротивления ротора, постоянными, нз формулы (10-43) найдем оптимальное значение г, при котором максимально: /опт хт+ Xs, при этом т„=-,-----(10-44) 2л! 1 + 2- -fl + -) Хт \ Хт J Следует заметить что кривая зависимости тп от л для малогабаритных двигателей имеет достаточно тупой максимум, н при изменении г в пределах от 0,5 до 2 значение т„ изменяется не более чем на 10 %. Поскольку нелинейность механических характеристик уменьшается с ростом активного сопротивления ротора - см. формулу (10-37), то отношение г/хт целесообразно выбирать в пределах 1,5-2,0. Рассмотрим теперь зависимость удельного пускового момента, выражае-мого формулой (10-44), от числа пар полюсов. Относительное индуктивное сопротивление ротора практически не зависит от числа пар полюсов и составляет 0.1-0,3. Подставляя в (10-44) относительное активное сопротивление статора, получаем [32] ее /Пп = --В.- (10.45) где Snaa - площадь пазов статора. Исследуя выражение (10-45) на максимум, находим т п. макс - Ропт=5пазО/С; 8.1-10 Ропт (10-46) (10-47) (10-48) Формула (10-47) устанавливает для управляемого двигателя оптимальное соотношение между числом пар полюсов, площадью пазов статора, диаметром расточки и частотой сети, а формула (10-48) дает возможность оценить, какой удельный пусковой момент можно прн этом получить. Вторым важным фактором, определяющим выбор основных соотношений в управляемом двигателе, является электромеханическая постоянная времени Тм. Она ие должна превосходить 20-40 мс. Заменяя /р -dpft/O*. где dp - средняя плотность ротора, и под- ставляя М„ из формулы (10-45), получаем яз РпР^ L Полученные формулы позволяют при заданных габаритных размерах машины и допустимой пусковой мощности определить ориентировочные значения пускового момента и электромеханической постоянной времени при различных числе пар полюсов и частоте сети. Двигатель с полым немагнитным ротором. Удельный пусковой момент получим из (10-43), полагая Xs = 0: /Пп = 2nf, (10-50) как функция г оно имеет максимум при г = Хт- Однако такое исследование характеристик двигателя не совсем оправданно. В управляемых двигателях полый ротор для уменьшения момента инерции изготовляется из алюминиевого сплава с заданным удельным сопротивлением, и единственный способ изменения сопротивления г - это изменение толщины полого стакана Д. Но при этом изменяется величина Хт, которая обратно пропорциональна Д + О, где б - суммарный воздушный зазор двигателя. Все это существенно усложняет анализ оптимальных соотношений в управляемых двигателях с полым ротором и их сравнение с двигателями, имеющими ротор беличья клетка . Рассмотрение вопроса, выполненное в работе [32], показывает: 1. При одинаковых удельном пусковом моменте и числе пар полюсов двигатели с полым ротором имеют большие габариты по сравнению с двига- телями, имеющими ротор типа беличьей клетки; это объясняется большими потерями в статоре от намагничивающего тока в двигателях с полым немагнитным ротором. 2. Для тока промышленной частоты / = 50 Гц двигатели с коротко-замкнутым ротором типа беличьей клетки имеют лучшие показатели по пусковым моментам и быстродействию. Применение двигателей с полым немагнитным ротором может быть оправданно здесь при большой мощности (однако при этом необходимо принудительное охлаждение ротора) и в прецизионных системах, требующих малого напряжения трогання. 3. Для частоты / = 400 Гц двигатели с ротором типа беличьей клетки имеют лучшие характеристики при диаметре корпуса до 6-8 см. Для частоты / = 1000 Гц Dk лежит в пределах 3-4 см. 10-10. Управляемый двигвтель постоянного тока с независимым возбуждением Управляемые двигатели постоянного тока с независимым возбуждением, как правило, представляют собой двухполюсные или четырехполюсные электрические машины постоянного тока с элек- 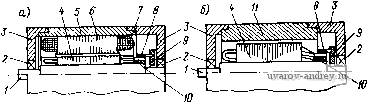 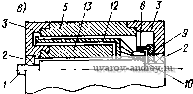 Рис. 10-19. Конструктивные схемы управляемых двигателей постоянного тока: а - с электромагнитным возбуждением; б - с постоянными магнитами; в - с полым якорем / - вал; 2 - подшипники; 3 - подшипниковые щиты; 4 - якорь с обмоткой; 5 - ярмо; 6 - полюс; 7 - обмотка возбуждения; 8 - щетка; 9 - щеточная траверса; 10 - коллектор; II - кольцевой магнит; 12 - полый якорь; 13 - цилиндрический магнит с отверстием тромагнитным возбуждением или с постоянными магнитами. Двигатели малой мощности не имеют добавочных полюсов. В отличие от двигателей общего применения управляемые двигатели для большего быстродействия имеют повышенное отношение длины и диаметра якоря /а/Од = 1,5-ь2,5. Особое внимание при конструировании этих двигателей уделяется надежности и качеству щеточно-коллекторного узла и подшипников для получения минимального напряжения трогания. Якорь двигателя имеет скос пазов на 1-2 зубцовых деления, а в машинах с постоянными магнитами он иногда выполняется в виде полого стакана. На рис. 10-19 приведены основные конструктивные схемы управляемых двигателей постоянного тока с независимым возбуждением. Теория работы управляемых двигателей постоянного тока и протекающие в них электромагнитные процессы точно такие же, как и в машинах постоянного тока общего применения; полно они излагаются в общем курсе электрических машин, а кратко - в гл. 5. В настоящем параграфе даны некоторые специфические особен- j ности работы управляемых двигателей в динамических режимах, в частности при изменении управляющего напряжения. Общие соотношения. Уравнения ЭДС и момента двигателя с независимым возбуждением (рис. 10-20) имеют вид  Ua = Ea+iara+Ea dig dt Рис. 10-20. Электрические схемы управляемого двигателя постоянного тока с независимым возбуждением U, = iff+Lf £ = СФш, М=СФ1а (10-51) где индексом а обозначены величины, относящиеся к якорю, а индексом / - к обмотке возбуждения; Ф - магнитный поток полюсов; С - постоянная, зависящая от обмоточных данных якоря. При составлении этих уравнений приняты следующие допущения: 1) падение' напряжения под щетками значительно меньше падения напряжения в якоре; 2) магнитная цепь машины не насыщена, и индуктивность цепи возбуждения Lf постоянная; 3) влиянием реакции якоря и коммутационных токов на магнитный поток машины пренебрегаем. В действительности указанные допущения не всегда выполняются, что приводит к некоторому расхождению теоретических и экспериментальных характеристик управляемых двигателей постоянного тока. Управление угловой скоростью двигателей постоянного тока с независимым возбуждением производится двумя способами: 1) изменением подводимого к якорю напряжения Ua при постоянном токе возбуждения (магнитном потоке); такой способ управления называют якорным; 2) изменением напряжения Uf, подводимого к обмотке возбуждения, при постоянном токе якоря (что достигается включением в цепь якоря добавочного балластного сопротивления); этот способ управления называется полюсным. Очевидно, что в двигателях с постоянными магнитами возможно только якорное управление. Наибольшие отклонения линейных теоретических характеристик от экспериментальных будут у двигателей с управлением по цепи обмотки возбуждения вследствие нелинейности кривой намагничивания и гистерезиса. Характеристики двигателей при якорном управлении (Уа = t/y). При этом способе управления Ф = const и, следовательно, ta - = ka(i,p, М = kaia, ГДС = СФ = COHst. Уравнение ЭДС цепи якоря примет вид La dM (10-52) Рассмотрим вначале установившиеся характеристики двигателя, при которых dMIdt = 0. Из уравнения (10-52) находим M = -(f/y-;fe,a)p). (10-53) На рис. 10-21 приведено семейство механических характеристик управляемого двигателя при различном напряжении управления; они представляют собой отрезки прямых. Входящие в уравнение (10-53) коэффициенты kg и kjra определяются из очевидных соотношений Uy3>U!,2>lJyl м и poW 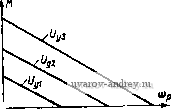 (10-54) J Рис. 10-21. Механические ха-где Uyfj - номинальное управляю- рактеристики управляемого щее напряжение якоря; Mnv - HOMH- двигателя постоянного тока нальный пусковой момент сОрод,- ри якориом управлении номинальная скорость холостого хода. Вводя относительные величины м MaN UyN ШрвЛГ уравнение (10-53) запишем в более простом виде m = %-v. (10-55) Передаточную функцию управляемого двигателя получим из уравнения (10-52) и уравнения движения ротора РгрЩ = М., (10-56) где - коэффициент механического (вязкого) трения в двига-Подставляя выражение момента (10-56) в уравнение (10-52) и обозначая р == -т-. находим kaira (.р + -/.р) Р + f тр + (10-57) в управляемых двигателях индуктивность цепи якоря La мала, и в формуле (10-57) членами, содержащими La, можно пренебречь; это позволяет при расчетах использовать более простое выражение передаточной функции двигателя Я(р) = =--. (10-58) Для управляемых двигателей, применяемых в приборных следящих системах, Гтр < kl/га и передаточная функция примет такой же вид, как для двухфазных управляемых двигателей 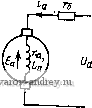 здесь = l/ka = сйро\/ум - коэффициент управления двигателем по скорости (крутизна регулировочной характеристики); Тм = Jprjta - электромеханическая постоянная времени. Характеристики двигателей при полюсном управлении {Uf = Uy), Этот способ управления применяется в тех случаях, когда мощность источника управляющего напряжения мала и требования к быстродействию привода сравнительно невелики. Как уже указывалось, управление двигателем производится при постоянном токе якоря, что практически достигается включением в цепь якоря балластного сопротивления Гб (рис. 10-22), выбираемого из условия (га -f Гб) X ia > Еа- Уравнсния ЭДС и момента двигателя примут вид Рис. 10-22. Электрическая схема управляемого двигателя при полюсном управлении и а = la (Га + Гб); Uy = 1>Г, + Lf; fp-~- + pTp(Op=kaifia. (10-59) Отсюда находим передаточную функцию двигателя IaJa (Га + Гб) rf ч pTpj/f+fxp (10-60) где р - оператор Особенность этого способа управления состоит в том, что в двигателе отсутствует внутреннее электромагнитное демпфирование; вследствие этого в систему регулирования необходимо вводить внешнее демпфирование или применять другие методы стабилиза- ции следящих систем. Физически отсутствие демпфирования объясняется тем, что электромагнитный момент двигателя М = kaiaif при ia = const не зависит от скорости, а механические характеристики представляют собой семейство прямых, параллельных оси абсцисс (рис. 10-23). Особенности характеристик двигателей с постоянными магнитами. У двигателей этого типа возможно только якорное управление. Их характеристики аналогичны характеристикам управляемых двигателей с электромагнитным возбуждением. Применение для этих двигателей постоянных магнитов с большой коэрцитивной 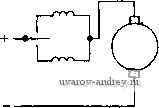 Рис. 10-23. Механические характеристики управляемого двигателя при полюсном управлении Рис. 10-24. Схема реверсивного управляемого двигателя с последовательным возбуждением силой позволяет получить высокие энергетические показатели, лучшее внутреннее электромагнитное демпфирование и большее быстродействие, чем у двигателей тех же габаритов с электромагнитным возбуждением. Особенно высокое быстродействие имеют двигатели с полым якорем. Управляемые двигатели постоянного тока с полым якорем (см. рис. 10-19, а) не имеют реактивных моментов, обусловленных пульсацией магнитного потока в воздушном зазоре, поэтому напряжение трогания для них значительно меньше, чем для управляемых двигателей с барабанным якорем. Еще большее быстродействие можно получить в двигателях с гладким якорем, в которых обмотка якоря укладывается непосредственно на поверхность ферромагнитного цилиндра. Такие двигатели, выполняются с отношением длины к диаметру IID = 5 -ь8 и могут работать в форсированных режимах. 10-11. Управляемый двигвтель постоянного тока с последовательным возбуждением Этот тип двигателя применяется в приводах, для которых необходим наибольший пусковой момент, а требования линейности механических характеристик невысоки. Обычно для реверса двигатель имеет две обмотки возбуждения, включаемые последовательно с якорем, как показано на рнс. 10-24. 1 ... 12 13 14 15 16 17 18 |
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |