


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 ... 11 12 13 14 15 16 17 18 скоса паза и определенного соотношения между шириной шлица и зубца. Расчеты показывают, что при оптимальном выборе указанных величин, ошибку в передаче угла можно оценить по формуле (...) Аад 30/р. Кроме того, на суммарную погрешность многополюсного ВТ-датчика существенное влияние оказывают технологические погрешности зубцовой зоны; в результате для обеспечения суммарной погрешности в передаче угла, не превышающей нескольких секунд, необходимо число пар полюсов выбирать в пределах 100-150. Для изготовления ВТ со столь большим числом пар полюсов при наружном диаметре корпуса до 100 мм применяются сплошные магнитопроводы, пазы которых выполняются путем механической или электроэрозионной обработки. 9-12. Синусно-косинусный индукционный редуктосин При заданных габаритах вращающегося трансформатора наибольший коэффициент электрической редукции можно получить, используя зубцовые гармоники поля, аналогично тому, как это ~ выполнено в субсинхронных двигателях (см. § 4-5). Принципиальная схема простейшего двухфазного индукционного редуктосина представлена на рис. 9-31. Статор имеет четыре зубца, на которых расположена сосредоточенная обмотка, образующая четырехполюсную систему возбуждения. На статоре же уложены вторичные обмотки - синусная (Ь) и косинусная (а), которые охватывают по  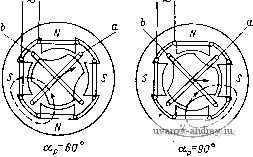 06p=J0° Рис. 9-31. Принципиальная схема двухфазного индукционного редуктосина для разных положений ротора ар два паза и являются двухполюсными. При равномерном воздушном зазоре электромагнитная связь между обмоткой возбуждения и вторичными обмотками отсутствует. В случае зубчатого ротора (в редуктосине, указанном на рис. 9-31, Zp = 3) между обмотками возникает взаимная индуктивность, которая изменяется в зависимости от угла поворота ротора с периодом, равным 2n/zp. На рис. 9-31 показаны угловые положения ротора, при которых пото- косцепления между обмоткой возбуждения и вторичными обмотками максимальны или равны нулю. Выбором ширины зубцов статора и ротора, а также скоса паза можно добиться того, чтобы зависимость взаимной индуктивности обмоток от угла поворота ротора была близка к синусоидальной. Для анализа возможных соотношений между числом пазов и числом пар полюсов в индукционном редуктосине воспользуемся методом гармонических проводимостей. Для получения наибольшего коэффициента электромагнитной редукции в качестве рабочей гармоники магнитной проводимости, так же как и в субсинхронных двигателях [см. формулу (4-36)], принимаем гармонику 4 = Кг COS [(Zp -2с) ф-ZpOp], где р =(0р^ -угол поворота ротора. Обмотка возбуждения редуктосина с числом пар полюсов р' создает пульсирующую НС F = Fm cos р'ф cos со t. Индукция магнитного поля, соответствующая выбранной гармонике магнитной проводимости, будет В = В; {cos [(zp - Zc -f p) Ф-Zpap] -f cos [(Zp-Zc-p) ф-Zpap]) cos (oi, где Bm = - FJmz- Положим, что на статоре редуктосина имеются две обмотки с числом пар полюсов р, сдвинутые в пространстве относительно друг друга на 90/р градусов; их НС Fa = 1 cos РФ cos (at; F - Fx sin рф cos (ot. Эти обмотки будут взаимодействовать с полем обмотки возбуждения от рабочей гармоники магнитной проводимости, если 2р-Zc±p== ±р- (9-39) Числа пар полюсов р и р' для исключения электромагнитной связи между обмотками по высшим гармоникам поля и обеспечения выполнимости обмоток должны удовлетворять соотношению р' = 2pk, где й = 1, 2, . . . Подставляя это выражение в формулу (9-39), получаем 2p = Zc±p(2± 1). . В частности, при k = 1 Zp = Zc±p; Zp=Zc±3p. (9-40) Число пазов на статоре Zc = 2 тр/ = 4 pq (здесь q - число пазов на полюс и фазу). Из соотношений (9-40) находим 4д±1 4?±3 4? Для q - l.n q = 2 получим рекомендуемые отношения числа пазов статора и ротора 8 8 8 7 9 11 Обычно индукционные редуктосины выполняются как плоские электрические машины с относительно большим числом пар полюсов вторичной обмотки (р = 10+20), что позволяет получить достаточно высокий коэффициент электрической редукции. Вторич-  Рис. 9-32. Принципиальная конструктивная схема редуктосина для Zp = 3 (а) и зависимость выходного напряжения двух фаз от угла поворота ротора ар (б) ные обмотки редуктосина могут быть размещены на тех же полюсах, что и обмотка возбуждения. На рис. 9-32, а приведена конструктивная схема для z = 3. Каждая фаза вторичной обмотки образована двумя диаметрально расположенными и согласно соединенными катушками. На основании конструктивной схемы и характера магнитного поля можно показать, что при повороте ротора на угол 2я выходные напряжения будут изменяться с периодом, равным 2n/zp. Напряжения сдвинуты в пространстве относительно друг друга на я/(2гр). Составим уравнения ЭДС редуктосина, учитывая, как и выше, только первые гармоники магнитной проводимости. В этом случае собственные индуктивности обмоток будут постоянны, а взаимная 268 индуктивность Первичной и вторичной обмоток Изменяется с периодом 2я/2р. Уравнения ЭДС будут иметь вид
  Ротор Рис. 9-33. Пластины магнитопровода ноииусного ВТ: а - пластины статора; б - пластины ротора где Zf = rf + jxfs - собственное сопротивление обмотки возбуждения; Xf, - индуктивное сопротивление намагничивания обмотки возбуждения; х'о - индуктивное' сопротивление намагничивания вторичных обмоток; Za = /-<, + \Xas + Za\ Z = + jxs + Z j, - сопротивления вторичных обмоток, включая сопротивления нагрузки. Найдем токи во вторичных обмотках, считая, что выполнено условие вторичного симметрирования Za = Z . Из уравнений (9-41) получим i im COS Zpa jXm sin Zpa (Z, + /Xo)(a+/o) + 4 Интересной модификацией индукционного редуктосина является но-ниусный ВТ, предложенный американской фирмой Бэлл телефон . Статор кййиуснйго Вт имеет явновыражеййые полюсы с зуёчаФыми пойюсйыми йа-конечниками (рис. 9-33); ротор зубчатый, с числом зубцов, не равным числу зубцов настаторе; при числе полюсов статора 2/, = 10 и 2е = 30 можно при-ия1ь гр - о, ИЛИ 33. На полюсах статора расположена обмотка возбуждения. На эти же полюсы укладываются косинусная и синусная обмотки; число витков этих обмоток определяется по формулам я Wai = Wm COS ( Wbi = WmSm i 2n3l (9-42) где ( - номер полюса (( = О, 1.....2/7-1). Магнитный поток под каждым полюсом кроме постоянной составляю-SIT, <=°,Р ит переменную составляющую, изменяющуюся с периодом я/2р. Учитывая первую гармонику, для магнитного потока г-го полюса ИМ66М Фг = Фо -Ь Фг COS 2р - i -. (9-43) Потокосцепления косинусной и синусной обмоток равны 2р-1 2р-1 Fa= 2 Ф№г; П= Е iWbi. 1=0 i=a Подставив сюда выражения (9-42) и (9-43) и выполнив суммирование, получим при условии, что 2р ф р, Zp ф 2/7, Ч'а = Ч'т COS Zpa; Ч'ь = msin 2ра, где = Фг Zp Wmp. При синусоидальном изменении потока полюсов во времени ЭДС вторичных обмоток будет Еа = -~г г^тр COS 2ра; 1/2 Еь= - Фга-тР sin 2ра. Выбор числа зубцов иа статоре и роторе определяется необходимым значением коэффициента электрической редукции и требованием максимального Фг- 9-13. Поворотный индуктосин Устройство и принцип работы. Поворотный индуктосин представляет собой плоскую электрическую машину, основными элементами которой являются два изоляционных диска с нанесенными на них печатными обмотками; диски расположены на разных осях соосно и параллельно и могут поворачиваться относительно друг друга. Магнитопровода индуктосин не имеет. Обмотки машины представляют собой радиальные токопроводящие пластины, соединяемые по определенной схеме. Простейшей является обмотка, равномерно распределенная по внешней части диска и имеющая выводные концы для подвода тока или снятия ЭДС. Двухфазная обмотка выполняется в виде нескольких секций, сдвинутых относительно друг друга на половину полюсного деления. Наибольшее распространение получил поворотный индукто-270 син, у которого статор (неподвижный диск) состоит из двУх многополюсных секционированных фазных обмоток, а ротор - из одной многополюсной обмотки. Обмотки статора сдвинуты относительно друг друга на половину полюсного деления ротора. На рис. 9-34 схематически показана конфигурация обмоток ротора и статора поворотного индуктосина. Для получения симметричных обмоток число петатных проводников на роторе и в секции статора должно быть четным. Число проводников в обмотках индуктосина зависит от числа пар полюсов, которые выбираются кратными 10; 2* {k = I, 2, 3, . . .) или 180 в зависимости от применения индуктосина. Синусоидальная зависимость взаимной индуктивности обмоток от   Рис. 9-34. Конфигурация обмоток статора (а) и ротора (б) индуктосина угла поворота ротора достигается путем выбора определенного отношения ширины проводника к полюсному делению, скоса проводников и сокращения шага обмотки статора. Частота напряжения питания индуктосина находится обычно в пределах 10-100 кГц; при этом коэффициент передачи по напряжению составляет 0,005- 0,01. Применение более высоких частот вызывает неравномерное распределение токов в проводниках и усиливает емкостные связи между обмотками, что приводит к снижению точности индуктосина. обмотки индуктосина на указанных частотах имеют практически только активное сопротивление, которое составляет несколько ом. Таким образом, поворотный индуктосин по своим электромагнитным связям эквивалентен ВТ с сосредоточенными обмотками, имеющему одну обмотку на роторе и синусную и косинусную обмотки на статоре. Режимы работы. При питании обмоток статора переменным током в роторе индуктосина индуцируется ЭДС, амплитуда и фаза которой являются функциями угла поворота ротора. В зависимости от способа питания обмоток статора различают два режима работы индуктосина. При питании обмоток напряжениями, амплитуды которых изменяются соответственно по синусоидальному и косинусоидальному законам, а фазы совпадают, индуктосин работает в режиме пульсирующего поля, а измерение угла производится при нулевом напряжении на выходе машины. Этот режим работы индуктосина называется амплитудным, он аналогичен работе ВТ в режиме преобразователя координат и отличается от него наличием электромагнитной редукции. При питании обмоток статора напряжениями равной амплитуды, но сдвинутыми по фазе относительно друг друга на 90°, индуктосин работает в режиме кругового вращающегося поля, а измерение угла сводится к измерению фазы напряжения на однофазной обмотке индуктосина. При фазовом режиме работы индуктосин представляет собой многополюсный индукционный фазовращатель, отличающийся от обычного ВТ в режиме фазовращателя наличием электромагнитной редукции. -HZP Рис. 9-35. Структурная схема следящей Рис. 9-36. Структурная схема системы с индуктосином в фазовом ре- следящей системы с индуктоси-жиме ном в амплитудном режиме В качестве примера использования указанных режимов рассмотрим индикаторную следящую систему. На рис. 9-35 и 9-36 показаны структурные схемы следящей системы с индуктосином соответственно в фазовом и амплитудном режиме. При фазовом режиме (рис. 9-35) работа систйиы происходит следующим образом. Напряжение генератора 1 через фазорасщепитель 2 и усилители 3 \i 4 подается с фазовым сдвигом 90° на статорные обмотки индуктосина 5. Напряжение с выхода индуктосина через усилитель 6 и фазовращатель 7 поступает на вход фазочувствительного выпрямителя 8, опорное напряжение которого задается генератором /. Следящая система, состоящая из силового усилителя 9 и двигателя с редуктором 10, поворотом ротора фазовращателя 7 сводит к нулю появляющийся на выходе фазочувствительного выпрямителя сигнал рассогласования. При повороте индуктосина на угол а ротор фазовращателя повернется на угол ра, где р - число пар полюсов индуктосина. Если снабдить фазовращатель шкальным устройством, то можно произвести отсчет угла поворота ротора индуктосина с высокой точностью. При амплитудном режиме (рис. 9-36) работа системы существенно отлична. Как и раньше, питание схемы производится от генератора /, напряжение которого подается на двухполюсный ВТ 2. Напряжения ВТ, пропорциональные косинусу и синусу угла поворота, подаются через усилители 3 и 4 (или без них) на обмотки статора индуктосина 5. Напряжение с ротора индуктосина через усилитель 6 подается на вход фазочувствительного выпрямителя 7, опорное напряжение которого задается генератором Выходной сигнал с выпрямителя поступает на силовой усилитель 8 и далее на управляемый двигатель 9, который через механический редуктор поворачивает ротор ВТ до тех пор, пока сигнал рассогласования не станет равным нулю. Поворот ротора двухполюсного ВТ, как и при фазовом режиме, равен ра. Оба режима работы можно использовать также при разработке синхронных следящих систем с каналами грубого и точного отсчега (рис. 9-37). В канале грубого отсчета применены двухполюсные ВТ, а в канале точного отсчета - поворотные индуктосины с равным числом пар полюсов.  Усшштеяь
Нндуктосин-датчик Исштель  Нидутосин-приетж
Выход Двигатель Усилитель Усилитель Рис. 9-37. Принципиальная схема следящей системы с каналами грубого н точного отсчета Индуктосины находят применение в прецизионных преобразователях код-угол и угол-код. При этом в первом преобразователе обычно используется амплитудный режим работы, а во втором - фазовый. Уравнения ЭДС. Схема электромагнитных связей обмоток индуктосина изображена на рис. 9-38. Этой схеме соответствует система уравнений 1 2 3
(9-44) Решая эту систему относительно тока ротора /3, получаем /3 = - [t/i (/(oMia/wMas -Z2/(oMi3) -1/2 (Zi/wMjs -/(0М12/ЮМ13)], (9-45) где A - определитель системы уравнений (9-44). Для точной работы индуктосина в амплитудном и фазовом режимах необходимо выполнить следующие условия: равенство сопротивлений фаз статора (Zi = = Z); равенство нулю взаимной индуктивности обмоток статора (М^ = 0); синусоидальная (ко-синусоидальная) зависимость взаимной индуктивности обмоток статора и ротора от угла поворота ротора (М13 = - М sin ра; М23 = Л1 cos pa). При этом из выражения (9-45), найдем: для амплитудного режима работы  Ui=U cos г|); f jaM и я - t/a = sin г|); sin (pa-г])); (здесь if) - преобразуемый в код угол); для фазового режима работы Рис. 9-38. Электромагнитные связи в обмотках индуктосина Погрешности в работе индуктосина вызываются следующими основными причинами: неравенством амплитуд взаимной индуктивности обмоток статора; неточностью фазовых сдвигов питающих напряжений; электромагнитной и емкостной связью между обмотками статора; высшими гармониками во взаимной индуктивности обмоток статора и ротора. Погрешности каждой из этих причин могут быть проанализированы с помощью выражения (9-45). 9-14. Функциональный преобразователь с сосредоточенными обмотками Функциональный преобразователь (ФП) с сосредоточенными обмотками представляет собой простейшую систему электромашинного типа, на статоре и роторе которой уложены обмотки, занимающие по два паза. На рис. 9-39 показаны магнитная система и схема обмоток ротора и статора двухфазного функционального преобразователя с взаимно перпендикулярными осями фаз. Требуемая функциональная зависимость выходной ЭДС от угла поворота ротора может быть достигнута путем выбора: 1) скоса пазов статора и ротора; 2) шага обмотки; 3) формы воздушного зазора между ротором и статором. Из ФП с сосредоточенными обмотками наибольшее распространение в автоматике получили линейные преобразователи с диапазоном изменения угла ± 90°, имеющие обмотки с шагом, равным полюсному делению, а также синусно-косинусные трансформаторы, У которых сйнусНОё преобра.чование достигается выбором скоса паза. Линейный индукционный преобразователь. Этот тип преобразователя имеет по одной сосредоточенной обмотке на статоре и роторе. При включении одной из обмоток в сеть переменного тока в воздушном зазоре машины образуется магнитное поле. Прене-  Рис. 9-39. Двухфазный функциональный преобразователь с взаимно перпендикулярными обмотками: а - магнитная система; б - схема обмоток брегая сопротивлением стали магнитопровода и краевым эффектом от пазов, можно принять, что индукция магнитного поля по расточке распределена по прямоугольному закону (рис. 9-40, а).   О Ж Ж Рис. 9-40. К определению ЭДС сосредоточенной обмоткн: а - распределение индукции по расточке; б - зависимость потокосцепления от углового смещения обмотки Примем за нулевое положение ротора положение, при котором обмотки взаимно перпендикулярны. При повороте ротора на угол ± 90° от нулевого положения потокосцепление вторичной обмотки в режиме холостого хода, а также ЭДС будут изменяться по линейному закону (рис. 9-40, б). В действительности вследствие нелинейности кривой намагничивания материала магнитопровода и наличия пазов распределение индукции по расточке отличается от прямоугольного. Это приводит к исКйженИю линейной зависимости ЭДС во вторичной обмотке от угла поворота ротора. В реальных образцах преобразователей диапазон изменения угла, в котором линейная зависимость выдерживается с погрешностью 0,2-0,3 %, составляет 75-80°. При включении во вторичную обмотку нагрузки Z в линейной зависимости выходного напряжения от угла поворота ротора появляется амплитудно-фазовая погрешность. Можно показать, что вторичное напряжение преобразователя при наличии нагрузки определяется формулой - I is iXm + 2s + /V + 2 / a \2 h V 0 J (9-46)  Рис. 9-41. Магнитная система со Рис. 9-42. Магнитная система с рав-скосом паза, выполненным по за- номерным скосом паза кону у (х) = arcsin {2х/1) где Хт, Zis, Wi И х'т, Zs, - соотвстственно индуктивные сопротивления намагничивания, собственные сопротивления и числа витков первичной и вторичной обмоток. Синусно-косинусный преобразователь со скосом пазов. Преобразователь со скошенными пазами можно представить как совокупность нескольких элементарных преобразователей с прямыми пазами, сдвинутых относительно друг друга. Для простоты будем считать, что скос паза цроизведен только на роторе. Пусть Еэ = = / (а) - функциональная зависимость ЭДС, воспроизводимая элементарным преобразователем. В общем случае это периодическая несинусоидальная функция, причем в силу своей симметрии относительно начала координат она содержит только нечетные гармоники. Если скос паза выполнен по закону г/ск = у (х) (рис. 9-41), то с учетом скоса функцию Еэ = f (а) запишем в виде Еэ. СК - / R J (9-47) где R - радиус магнитопровода ротора. 276 Расположим начало координат посредине пакета. Тогда выходная ЭДС преобразователя будет £(а)= J Еэ.скйх= J / - 2 -1.2 Если скос паза выполнить по закону у (х) = arcsin {2x11), R J (9-48) (9-49) то выходная ЭДС преобразователя в зависимости от угла поворота ротора будет изменяться по синусоидальному закону. Действительно, представим периодическую функцию (9-47) в виде ряда Фурье, содержащего нечетные гармоники: £э. СК = / [а + = J ak+i sin [(2/г + 1) (а + % + , fe=0 где ft = 1, 2, 3, . . . Подставив это выражение в (9-48), получим (х> 112 . £( )= Zak+i I sin[(2ft + l)(a + %)]cos(2ft + l)- + + cos[(2ft-M)(a+a;,)]sin(2ft+ 1)j Использовав приведенную выше формулу (9-49) для у {х) и выполняя интегрирование, получим £ = Ох/ - sin (а + ifii) (9-50) На практике скос паза по закону (9-49) трудно осуществим по технологическим соображениям; чаще всего применяется равномерный скос пластин магнитопровода ротора (рис. 9-42). При таком скосе у = (а/Л х = х. В этом случае выходная ЭДС Е = У ak+il Из этого выражения следует, что при равномерном скосе паза возможно уничтожение какой-либо одной гармоники и кратных ей. Условием уничтожения гармоник порядка 2k + 1 будет р = = 2nR/[{2k+ \)1]. 9-15. СКВТ С обмотками обратной связи В малогабаритных ВТ существенное влияние на точность их работы оказывает нестабильность собственных параметров от изменения температуры, частоты и от технологических факторов. Для уменьшения этого влияния в ВТ предусматриваются дополнительные обмотки, которые расположены по осям обмотки возбуждения и-квадратурной обмотки и включены на вход полупроводниковых усилителей, как показано на рис. 9-43. Рассмотрим уравнения ЭДС СКВТ с дополнительными обмотками и электронными усилителями. Поскольку входные сопротивления усилителей достаточно велики, то ток в дополнительных обмотках практически отсутствует. При определении электромагнитных связей в СКВТ их учитывают как дополни-
 к
Рис. 9-43. Принципиальная схема СКВТ с компенсацией изменения продольного и поперечного потоков тельное напряжение на основных обмотках СКВТ, включенных на выход усилителя. При этих допущениях уравнения ЭДС СКВТ запишем в виде Zf -f iXm О jxm К COS a Zk + jXm - jxmK sin a jxmK COS a jXfnKsin a - jXmK sin a jXmK cos a Za + jXmK 0 jXmK cos a 0 Zb + IxmK Ki [ - ixm (/> 4- Kla cos a -f Kib sin a) -f Uf] 2 [ - jXm {ik - Kia sin a -f Kib COS a)] 0 где /Ci и /Са - коэффициенты усиления усилителей в цепях обмотки возбуждения и квадратурной обмотки. Перенося члены с токами в левую часть этого уравнения и деля 1-ю и 2-ю строки обеих частей соответственно иа I -j- Ki и 1 + Ki, получаем
b 278 jxmKcos a jXmK sin a + iXm i + Ki - jXmKsin a jXmK COS a jxmK COS a - IxmK sin a Za + iXmK 0 jxmк sin a jXm К cos a Zb + iXmK
Сравнивая уравнения ЭДС (9-51) с уравнениями ЭДС обычного СКВТ (9-2), нетрудно установить, что введение дополнительных обмоток и электронных усилителей эквивалентна уменьшению собственных параметров первичных обмоток СКВТ в (1 -f Ki.i) раз. Это означает, что при большом коэффициенте усиления усилителей {Ки Кг = 10* -г-10*) эквивалентные собственные параметры первичных обмоток рассматриваемого СКВТ настолько малы, что их нестабильность практического значения не имеет. 9-16. Цифровые преобразователи угла Широкое применение дискретных систем автоматического управления, имеющих в свбем составе ЦВМ, цифровых следящих систем, микропроцессоров для улучшения качественных показателей различных технических устройств, в частности электродвигателей, определило большую и непрерывно растущую потребность в цифровых преобразователях угла (ЦПУ). В настоящее время разработано и выпускается значительное число различных типов ЦПУ, отличающихся друг от друга своим функциональным назначением, принципом работы, конструктивным исполнением. Большинство современных ЦПУ выиолнено по двум конструктивным схемам, в зависимости от того, непосредственно или косвенно угловое перемещение преобразуется в кодовую величину. В первбм случае квантуется сам измеряемый угол, а во втором - промежуточная аналоговая величина (параметр), изменяющаяся пропорционально углу. Каждый из указанных ЦПУ может быть накапливающего типа, в котором измеряемый угол пропорционален числу импульсов, или считывающего типа, в котором данному углу соответствует вполне определенная совокупность импульсов (код). Независимо от вида ЦПУ он состоит из двух частей: датчика угла того или иного типа (ДУ) и электронного устройства (ЭУ), формирующего выходной сигнал в виде требуемой кодовой величины. Типичным представителем ЦПУ с непосредственным преобразованием угла являются фотоэлектрические преобразователи, использующие указанные выше методы преобразования: последовательный счет приращений угла и считывание с кодовой маски; ДУ таких преобразователей выполняется в виде прозрачного диска с нанесенными равномерно по окружности рисками (при последовательном счете) или в виде специальной кодовой маски с чередующимися темными и светлыми участками. ЦПУ такого типа позволяют измерять угловое положение вала с точностью десятков и даже единиц секунд. Высокоточные ЦПУ с косвенным преобразованием строятся на электромашинных датчиках угла с электрической редукцией (много- полюсные ВТ; индукционные редуктосины; индуктосины) или на генераторных многополюсных датчиках с вращающимся модулятором. В качестве параметра в ЦПУ такого вида используется фаза или амплитуда выходного напряжения переменного тока. Более широко распространены ЦПУ, в которых ВТ работает в режиме фазовращателя, а преобразование осуществляется по схеме угол-фаза-временной интервал-код. В качестве примера накапливающего преобразователя такого типа рассмотрим схему, изображенную на рис. 9-44, а. Функции фазовращателя (ФБ) вы- в  ФФШ
 Рис. 9-44. Преобразователь угол-фаза-импульс: а - структурная схема; б - временная диаграмма полняет четырехобмоточный ВТ, работающий в режиме фазовращателя (см. §9-5). Фазовый сдвиг между напряжениями на обмотке возбуждения (jf и выходным напряжением (j линейно изменяется в зависимости от угла поворота ротора ВТ 9. Эти напряжения подаются на фазовые формирователи импульсов ФФИ 1 и ФФИ 2. С выходов формирователей получим импульсы в моменты прохождения синусоид напряжений через нуль от отрицательных значений к положительным (рис. 9-44, б). Очевидно, что временной интервал между импульсами пропорционален углу поворота ротора ВТ. Импульсы ФФИ управляют триггером Тг, который, воздействуя на выпрямитель {В), пропускает в счетчик импульсов {СИ) от генератора Г число импульсов, пропорцио- нальное временному интервалу, а следовательно, и углу поворота ротора ВТ. Обозначая частоту генератора импульсов /г, частоту напряжения фазовращателя /, число пар полюсов ВТ р, нетрудно получить выражение для числа импульсов, накопленных в СИ, в зависимости от угла 9 = j£ e. Pf В ЦПУ, использующих в качестве параметра амплитуду переменного напряжения, в код преобразуется отношение сигнального и опорного напряжений. Это необходимо для устранения зависимости работы ЦПУ от колебаний напряжения источника питания. Не останавливаясь на классификации ЦПУ этого типа, приведем в качестве примера структурную схему амплитудного ЦПУ (рис. 9-45). В структуре ЦПУА можно выделить три основных функциональных блока: датчик угла (ДУ); электронный преобразователь {ЭП); автономный источник питания {АИП). Датчик угла выполнен в виде многополюсного многофазного ВТ, имеющего вторичные электрически ортогональные сигнальные обмотки. Электронный преобразователь содержит устройство выбора сигнальных обмоток {УВСО), преобразователь, отношения переменных напряжений в код {ПОИК), формирователь строб-импульсов {ФСИ), п г 1 фси \ АИП ЭП Ш Рис. 9-45. Структурная схема ЦПУ-A с датчиком типа ВТ необходимых для стообирования сигналов переменного тока, ге нератор сигналов (ГС) и счетный регистр {Рг). В состав АИП входит усилитель мощности (УМ) и источник постоянного напряжения {ИПН) для питания блоков ЭП. Применение многополюсного ВТ как датчика точного отсчета требует введения в схему формирователя старших разрядов кода (ФСРК), работа которого синхронизируется сигналами с выходов УВСО и ПОНК. ФСРК может реализоваться как в виде электронного блока (для ЦПУ накапливающего типа), так и в виде преобразователя угла с датчиком грубого отсчета. Согласование и преобразование выходного кода ЦПУА (а) в форму, удобную для передачи во внешние устройства и ввода в ЦВМ 1код (а) ], осуществляет устройство согласования и преобразования кода {УСПК). Качество ЦПУ оценивается по максимальной погрешности точного отсчета, быстродействию, максимальной скорости вала, массогабаритным показателям. В настоящее время при использовании электромашинных ДУ получены ЦПУ с максимальной погрешностью 1-2 и частоте вращения до 20 об/мин. Глааа десятая УПРАВЛЯЕМЫЕ ДВИГАТЕЛИ 10-1. Требования к характеристикам двигателей. Классификация Управляемыми (исполнительными) двигателями называются электрические машины, преобразующие амплитуду или фазу управляющего напряжения в угол поворота (угловую скорость) выходного вала. К характеристикам этих двигателей предъявляются специфические требования, вытекающие из особенностей работы исполнительных двигателей в следящих системах, системах автоматического регулирования, гироскопических устройствах и т. п. Основными из этих требований являются: широкий диапазон регулирования скорости; линейность механических и регулировочных характеристик; малая инерционность (высокое быстродействие); хорошие пусковые свойства; малый момент трения (напряжение трогания); отсутствие самопроизвольного вращения (самохода) при нулевом управляющем сигнале; возможность длительной работы в стопорном режиме. Энергетические характеристики двигателей - КПД, коэффициент мощности (для двигателей переменного тока) - имеют второстепенное, значение, поскольку исполнительные двигатели в большинстве случаев работают сравнительно короткое время (например, при наличии рассогласования в следящей системе). Как правило, исполнительные двигатели соединяются с нагрузкой через понижающий механический редуктор. Полезная мощность двигателя и передаточное число редуктора кред должны быть такими, чтобы обеспечить заданные угловую скорость со в и ускорение ев на нагрузке. Рассмотрим этот вопрос более подробно. Мощность на выходном валу (нагрузке) Р„ = МнСОн-f 8в (Ув-f Л^еддв) (йн, где У„, Удв - моменты инерции нагрузки и ротора двигателя. Эта мощность при М^, J , и со я несколько растет с увеличением коэффициента &ред (рис. 10-1, а). Мощность, передаваемая к нагрузке от двигателя, при линейной механической характеристике определяется формулой Рг = Лреддв = Лред (п - f Юр) ©р = Лред (Л1п - f ЙредЮ„) Vah, где Лред - КПД редуктора; F - крутизна механической характеристики двигателя, F - dM/dap-, М„ - пусковой момент двигателя; (Ор - угловая скорость ротора. Зависимость Ра (ред) представляет собой параболу (рис. 10-1, а). Для нормальной работы исполнительного устройства необходимо, чтобы Ра > Рн. Точки пересечения кривых и Ра определяют для данного типа двигателя область значений передаточного числа редуктора, при котором на нагрузке могут быть получены необходимые угловая скорость и ускорение. Иногда для выбора передаточного числа редуктора удобней пользоваться механической характеристикой двигателя и зависимостью момента на валу двигателя от передаточного числа ред: М Mn-F(Op = Мп-f сон^д; ред где М' - приведенный к валу двигателя момент нагрузки.  Дийпазон допустимых значении креЯ Рис. 10-1. Выбор передаточного числа редуктора: а - исходя из мощности; б - исходя из момента Совмещение этих кривых (рис. 10-1, б) определяет область возможных значений ред при заданных М„, Ми, ев, со в, Удв, Jh- В зависимости от вида питающего (управляющего) напряжения управляемые двигатели можно разделить на три группы: 1) управляемые двигатели переменного тока; 2) управляемые двигатели постоянного тока; 3) шаговые двигатели. Управление угловой скоростью двигателей переменного тока можно осуществить изменением приложенного напряжения и частоты. В маломощных следящих системах и приборных системах автоматического управления в качестве управляемых двигателей переменного тока применяются двухфазные управляемые асинхронные двигатели с короткозамкнутым ротором, скорость которых регулируется изменением амплитуды или фазы напряжения на одной из обмоток. Управление скоростью двигателей постоянного тока производится изменением напряжения в цепи якоря или изменением магнитного потока возбуждения; соответственно этому различают управляемые двигатели с якорным и полюсным управлением. Большинство управляемых двигателей постоянного тока выполняется с возбуждением от постоянных магнитов, и для них управление возможно только изменением напряжения на якоре. За посУ1едние годы в качестве управляемых двигателей постоянного тока применяются бесконтактные двигатели постоянного тока (см. гл. 6), в которых регулирование скорости осуществляется как изменением питающего обмотки напряжения (амплитудное управление), так и изменением скважности пульсирующего напряжения (широтно-импульсное управление). В шаговых двигателях регулирование скорости осуществляется с помощью электронного коммутатора за счет изменения частоты управляющих импульсов. В настоящей главе рассмотрена работа двухфазных асинхронных управляемых двигателей с короткозамкнутым ротором и управляемых двигателей постоянного тока. Анализ -работы шаговых двигателей вследствие специфики их электромагнитных процессов приведен в гл. 11. 10-2. Принцип работы, методы управления, особенности конструкции двухфазных управляемых двигателей Принципиальная электрическая схема двигателя приведена на рис. 10-2. На статоре двигателя располагаются две распределенные обмотки, сдвинутые в пространстве на 90°. Одна из обмоток О о п п Рис. 10-2. Электрическая схема двухфазного управляемого двигателя Рис. 10-3. Схема двухфазного управляемого двигателя с расщепленной обмоткой управления (/), называемая обмоткой возбуждения, постоянно включена в сеть переменного тока; на вторую обмотку {у) - обмотку управления - подается электрический сигнал в виде амплитуды управляющего напряжения или его фазы. Для того чтобы при подаче сигнала на обмотку управления возник вращающий момент двигателя, напряжения Uf и Uy должны быть сдвинуты по фазе относительно друг друга. Этот фазовый сдвиг обеспечивается непосредственно схемой, в которой работает двигатель, или при включении конденсатора последовательно с обмоткой возбуждения. Обмотку управления двигателя для упрощения согласования выходного каскада усилителя и двигателя выполняют часто в виде двух отдельных одинаковых частей (рис. 10-3), которые могут включаться последовательно, параллельно или с выведенной средней точкой. Управление двигателем осуществляется тремя различными способами, схематически представленными на рис. 10-4. При амплитудном управлении (рис. 10-4, а) на обмотку управления подается напряжение, переменное по амплитуде и сдвинутое по фазе относительно напряжения возбуждения на 90°. Напряжение управления характеризуют коэффициентом управления Я, = UylUf, где Uf VL Uy - действующее значение соответственно напряжения обмотки возбуждения и приведенного к ней напряжения управления. При Я, = 1 магнитное поле в воздушном зазоре двигателя является круговым, а при любом другом Я, - эллиптическим. При  Uy=uar Рис. 10-4. Принципиальные с емы способов управления двухфазными двигателями: а - амплитудного; б - фазового; в - амплитудно-фазового фазовом управлении (рис. 10-4, б) на обмотку управления подается постоянное по амплитуде напряжение, приведенное значение которого равно напряжению возбуждения. Управление двигателем производится путем изменения фазы напряжения управления. За коэффициент управления принимается sin гр, где - фазовый сдвиг между напряжениями возбуждения и управления. Для 51пг5, равного ± 1, магнитное поле в двигателе будет круговым. Схема, представленная на рис. 10-4, в, применяется при амплитудно-фазовом методе управления двигателем. При этом методе напряжение сети и напряжение управления совпадают по фазе. Фазовый сдвиг между напряжениями возбуждения и управления достигается при включении конденсатора в цепь возбуждения. Емкость (см. § 10-7) подбирается такой, чтобы при пуске двигателя поле в машине оказывалось круговым. По мере вращения двигателя изменяются как амплитуда управляющего напряжения, так и его фаза по отношению к напряжению возбуждения; рассмотренный метод управления называется поэтому амплитудно-фазовым. В зависимости от конструкции ротора различают три типа двухфазных управляемых асинхронных двигателей, схематически пред- 1 ... 11 12 13 14 15 16 17 18 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |