


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 ... 9 10 11 12 13 14 15 ... 18 8-9. Погрешности трансформаторной синхронной передачи При использовании в трансформаторной синхронной передаче идеализированных сельсинов управляющее напряжение в режиме синхронного поворота является функцией только угла рассогласования - см. (8-46), поэтому такая синхронная передача не имеет погрещностей. При работе синхронной передачи в режиме вращения, а также в тех случаях, когда характеристики применяемых сельсинов отличаются от идеальных, на управляющей обмотке появляется добавочное напряжение, которое не исчезает при нулевом угле рассогласования. Это добавочное напряжение Ai/y в общем случае, не совпадает по фазе с управляющим напряжением (рис. 8-31) и может быть разложено на две составляющие: At/yi - совпа- лОу^ Ли у Рис. 8-31. Добавочное управляющее напряжение сельсина-приемника дающую ПО фазе сОу (ее называют напряжением погрещности) и А{/у2 - сдвинутую по фазе относительно Uy на 90° (ее называют остаточным напряжением основной гармоники); кроме остаточного напряжения по основной гармонике в управляющей обмотке могут быть остаточные ЭДС высших временных гармоник. Составляющая добавочного напряжения А^/у^ проявляется в следящей системе в виде некоторого ложного угла рассогласования, что и обусловливает появление погрешности 6 в трансформаторной синхронной передаче. Составляющая Ai/yj, в принципе не вызывая погрещностей, ухудшает условия работы усилителя и затрудняет точную регулировку следящего привода. Погрешность 6 зависит как от положения ротора сельсина-приемника по отношению к статору (статическая погрешность), так и от угловой скорости сельсинов (скоростная погрешность). Рассмотрим кратко основные факторы, определяющие скоростную и статическую погрещности трансформаторной синхронной передачи. Скоростная погрешность трансформаторной синхронной передачи. Управляющая ЭДС сельсина-приемника в режиме вращения пропорциональна току 7, определяемому формулой (8-47): Еу = -1x1 i = xlsine-f--/ (x + 2;cos I l -f -2 -f ; [Xdl (!) + Xg2 } Она состоит из двух частей: первая часть, пропорциональная sin 9, представляет собой трансформаторную ЭДС, зависяп^ую от ri-{-r2 + ilXdl(j) + Xd2(j)] /о (Г14-Га) COS в X угла рассогласования, а вторая часть, пропорциональная угловой скорости сельсинов, есть ЭДС вращения. Составляющая ЭДС вращения, совпадающая по фазе с трансформаторной ЭДС, определяет скоростную погрешность (Г1 + Г2)У е„= 1ш П -f Г2 -f / [Xdl (j) -f Xgi] или (4+2)+(a;,+v) (8-48) Полученная формула показывает, что скоростная- погрешность сельсина-приемника, в трансформаторной синхронной передаче пропорциональна скорости сельсинов и зависит от соотношения активного и индуктивного сопротивлений цепи синхронизации сельсинов. Для уменьшения скоростной погрещности следует переходить на повышенную частоту; при этом уменьшается как отношение -i-, так и относительная угловая скорость сельсинов. <?2 Одним из способов уменьшения скоростной погрешности в следящих системах является сдвиг фазы опорного напряжения фазо-чувствительного усилителя, такой, чтобы оно оказалось в квадратуре с ЭДС вращения. Однако при этом происходит некоторое снижение эффективной крутизны управляющей ЭДС. Статическая погрешность в трансформаторной синхронной передаче обусловлена двумя факторами: несинусоидальностью магнитного потока и НС обмоток и неточностью изготовления сельсинов. Несинусоидальность НС и магнитного потока проявляется в том, что в кривой индукции магнитного поля в воздушном зазоре кроме основной гармоники присутствуют все нечетные гармоники. Третья, девятая и все, кратные трем, нечетные гармоники индуцируют в фазах трехфазной обмотки одинаковые ЭДС и при соединении обмоток в звезду в выходной ЭДС отсутствуют. Поэтому на работу трехфазных сельсинов оказывают влияние только гармоники порядков 6* ± 1, где Л = 1, 2, 3 и т. д. При повороте ротора сельсина пространственные гармоники также перемедаются: гармоники порядков 6;fe-I - против направления вращения ротора, а гармоники порядков 6Л -f 1 - по направлению вращения ротора с относительной скоростью (по отношению к ротору), обратно пропорциональной номеру гармоники. По отношению к статору 6fe 6fe эти гармоники имеют относительные скорости -- и и 6й - 1 бй -f-1 индуцируют ЭДС в обмотках. Появляющаяся при этом статическая погрешность может быть подсчитана по формуле бст = (а5-a7)sin6a --(aii-ais)sin 12ад-Ь . . ., (8-49) где Оу - относительное значение ЭДС, индуцируемой v-й гармо- никой поля: для неявнополюсного ротора 1 кск У^об с У^об. р V у2 Йск1об. с1об. pi для явнополюсного ротора Кск vko6. с у sin va,-ii/2 KiAo6. ci sin a,-ii/2 Путем выбора схемы обмотки, скоса паза, ширины полюсной дуги статическая погрешность от несинусоидального магнитного поля может быть снижена до нескольких угловых минут. 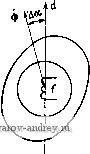  Рис. 8-32. Эллиптичность в расточке статора Рис. 8-33. Влияние короткозамкнутого витка в магнитопроводе на магнитный поток Статические погрешности из-за неточности изготовления сельсинов обусловлены: асимметрией магнитопровода, наличием короткозамкнутых витков, эксцентриситетом, неравенством параметров фаз обмотки синхронизации. Количественный анализ технологических погрешностей сельсинов может быть выполнен методами, описанными в § 1-6, на основе уравнений ЭДС трансформаторной синхронной передачи с асимметричными машинами. В настоящем параграфе ограничимся рассмотрением качественной картины явлений с целью установить зависимость погрешностей этого типа от углового положения ротора сельсинов. В случае магнитной асимметрии пакета статора его можно представить в виде магнитопровода, имеющего эллиптическую расточку (рис. 8-32). При изменении углового положения ротора ось его магнитного потока будет смещаться по отношению к ротору в направлении наибольшей магнитной проводимости. Вследствие этого возникнет погрешность. На один оборот ротора приходится два периода изменения этой погрешности. Аналогичное явление будет наблюдаться при воздействии короткозамкнутого витка в магнитопроводе (рис. 8-33). Здесь при вращении ротора изменяется как значение магнитного потока, так и его фаза. Эти изменения также будут проходить два периода за один оборот ротора. Неравенство параметров фаз синхронизирующих обмоток приводит к статическим погрешностям, изменяющимся тоже с двойной частотой относительно угла поворота ротора. Это дает возможность включением дополнительных активных сопротивлений, индуктивности и емкости в цепи синхронизации в некоторой степени скомпенсировать статические погрешности от неточности изготовления и остаточную ЭДС управляющей обмотки. В зависимости от максимальной статической погрешности (от ± 0,lX до ± 30) трансформаторные синхронные передачи разделяются на 11 классов точности. 8-10. Системы синхронной передачи на магнесинах В системах синхронной связи некоторых типов летательных аппаратов и в приборных комплексах, для которых масса и габариты должны быть минимальными при высокой надежности аппа- 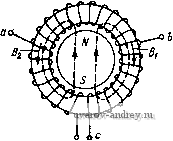
Рис. 8-34. Принципиальная схема магнесина Рис. 8-35. Аппроксимированная кривая намагничивания пермаллоя ратуры, применяются бесконтактные электрические микромашины с ротором в виде постоянного магнита, получившие название маг-несинов. Устройство и принцип работы. Магнесин представляет собой электрическую машину, схематически представленную на рис. 8-34. Статор выполнен в виде тора, набранного из листового пермаллоя. На торе в один слой равномерно уложена обмотка, имеющая два отвода. Отводы и выводные концы обмотки расположены под углом 120°; ротор - постоянный магнит цилиндрической формы. Рассмотрим,ЭДС, индуцируемые в отдельных частях обмотки магнесина при включении ее в сеть переменного тока частоты /. Магнитная индукция в правой и левой (по отношению к оси полюсов ротора) частях ротора будет B, = B, + Bj, где Bq - магнитная индукция, создаваемая/иостоянным магнитом в торе; В. - магнитная индукция переменного тока. Кривую намагничивания пермаллоя можно достаточно точно аппроксимировать ломаной линией (рис. 8-35). Здесь В макс - индукция насыщения. примем следующие допущения, вытекающие из общих соображений при выборе геометрии мащины: размеры тора и постоянного магнита таковы, что магнитная индукция постоянного магнита равна индукции насыщения (В„ = В„акс); амплитуда индукции переменного тока В„ такова, что работа происходит в пределах линейного участка кривой намагничивания {В„ < 2 Вмакс = 2Бо)-При этих условиях кривые изменения индукции в правой и левой частях тора и имеют вид, изображенный на рис. 8-36. Нетрудно видеть, что В2-Во и В^-Во представляют собой полуволны синусоиды, разложения которых в ряд Фурье имеют вид  - sin (at + cos 2(jit + cos4cu-- -sin (at + cos 2cu-t- Рис. 8-36. Изменение индукции в торе 2В 15п cos4cu-l- . . . ; отсюда, пренебрегая членами с cos 4сй получаем Bi - Bo- В В = Вп В sin cй^ sin cй^ COS 2(o, COS 2©. (8-50) Из формул (8-51) следует, что индукция магнитного поля в торе кроме гармоники основной частоты содержит высшие четные гармоники, наибольшей из которых является вторая. По полученным выражениям для индукции можно определить ЭДС для любого участка обмотки. ЭДС во всей обмотке индуцируется только основной гармоникой индукции: Sw ( dBi Вт И COS (at, (8-51) где S - площадь поперечного сечения тора; w - число витков. Нетрудно показать, что на отдельных участках обмотки ЭДС от основной гармоники не зависит от углового положения ротора, в то время как ЭДС от второй гармоники индукции изменяется в зависимости от угла поворота ротора по закону, близкому к синусоидальному. Это позволяет рассматривать обмотку магнесина с отводами под 120° для ЭДС двойной частоты как трехфазную синхронизирующую обмотку обычного сельс1Й1а для ЭДС основной частоты. ЭДС двойной частоты на выходе магнесина определяется формулами, аналогичными формулам для обычного сельсина: £аь = -£т sin а; £ = £ sin(a-t-60°); £ = £ sin (а-60°), (8-52) 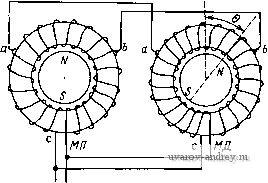 Рис. 8-37. Схема индикаторной синхронной передачи где Ет=-- Sffii/Bm-максимальная ЭДС; а -угол между осью полюсов и осью симметрии участка обмотки аЬ (на рис. 8-34 а = 0). Магнитный поток постоянного магнита в воздушном зазоре Ф = (В, Н- В,) S. Подставляя сЮда выражения (8-51), получаем Ф = 2СВо-eBS]+Jirc(y&2(at, (8-53) V я / Зп т. е. кроме постоянной составляющей магнитный поток содержит переменную составляющую двойной частоты. Индикаторная синхронная передача. Принципиальная схема индикаторной синхронной передачи приведена на рис. 8-37. Поскольку ЭДС частоты сети в обмотках датчика и приемника одинаковы, то в цепи синхронизации токов основной частоты не возникает. Токи от ЭДС двойной частоты появляются в том случае, когда угловые положения роторов датчика и приемника по отнощению к выводным концам обмоток торов неодинаковы. в результате взаимодействия этих токов с переменной составляющей магнитного потока той же частоты появляется синхронизирующий момент, который должен привести датчик или приемник в согласованное положение. Найдем выражение для синхронизирующего момента. Ток на участке (в фазе) тора аЬ lab - Em sin 6 £mSin 6 22аб 2 (ГаЬ + jXab) где Zab - полное сопротивление участка обмотки аЬ.  Рис. 8-38. Схема трансформаторной синхронной передачи НС по поперечной оси приемника равна НС фазы аЬ: - t-ab - Г - I 2 2 3- 2 Момент магнесина-приемника (МП) находим по общей формуле М = -Ф,, cos ((Oj = 1аь Sin J = W Ет sin 6 Xgb 2 2Zab Zab или, используя приведенные выше выражения для £ , получаем 8 rL + xl (8-54) ab-t-Xab Из этой формулы видно, что синхронизирующий момент магнесина выражается такой же формулой, что и момент сельсина. Расчеты показывают, что момент магнесина значительно меньше, чем у сельсинов аналогичного размера; к тому же точность передачи угла может быть получена вполне удовлетворительной, поскольку у магнесина на валу нет момента трения в контактном устройстве и реактивных моментов от зубчатости на статоре. Трансформаторная синхронная передача. Схема трансформаторной синхронной передачи с магнесином-датчиком (МД) приведена на рис. 8-38. В качестве приемника используется обычный сельсин-приемник (контактный или бесконтактный). Для предотвращения в цепи синхронизации токов основной частоты между магнесином-датчиком и сельсином-приемником включен согласующий трехобмоточный трансформатор, соотношение чисел витков в обмотках которого видно из рис. 8-38. Легко установить, что сумма ЭДС основной частоты в любом контуре цепи синхронизации равна нулю, поэтому токи основной частоты в этих цепях отсутствуют. Токи от ЭДС двойной частоты замыкаются по цепи синхронизации и образуют в сельсине-приемнике пульсирующий магнитный поток. Угловое положение вектора этого потока по отношению к фазам обмотки синхронизации зависит от угла поворота ротора магнесина-датчика. Пульсирующий магнитный поток будет индуцировать в управляющей обмотке сельсина-приемника ЭДС, по амплитуде и фазе которой можно судить об угле рассогласований датчика и приемника, как и в обычной системе трансформаторной синхронной передачи с вращающимися трансформаторами или сельсинами. Глава девятая ВРАЩАЮЩИЕСЯ ТРАНСФОРМАТОРЫ 9-1. Назначение, устройство и основные режимы работы Вращающимся трансформатором (ВТ) называется индукционная электрическая машина переменного тока, взаимная индуктивность обмоток которой изменяется по определенному закону в зависимости от угла поворота ротора. ВТ широко применяются в электромеханических счетно-решающих устройствах в качестве преобразователей угла поворота в переменное напряжение, Рис. 9-1. Конструктивная ВТ схема  / - крышки; 2 - подшипники; 3 - контактные кольца; 4 - пакет статора; 5 - пакет ротора; 6 - корпус изменяющееся по заданному закону в зависимости от угла, в синхронных передачах грубого и точного отсчета как измерители угла рассогласования между двумя осями, в преобразователях вал-цифра, в программных механизмах и т. п. Основными типами ВТ являются: 1) двухполюсные ВТ, имеющие по две взаимно перпендикулярные обмотки на статоре н ро- торе; 2) многополюсные ВТ с распределенными и сосредоточенными обмотками; 3) индукционные редуктосины и индуктосины; 4) функциональные ВТ и индукционные потенциометры. Двухполюсные ВТ выполняются как неявнополюсные электрические машины, имеющие равномерно распределенные пазы на статоре и роторе (рис. 9-1). Пакеты статора и ротора набираются из листовой электротехнической стали или пермаллоя. Для получения однородных магнитных свойств применяется веерная сборка листов и скос паза ротора на одно зубцовое деление. В пазы статора и ротора укладываются по две взаимно перпендикулярные обмотки; закон распределения витков по пазам подбирается таким образом  Рис. 9-2. ВТ с кольцевыми трансформаторами ; - подшипники; 2 - крышки; 3- кольцевые трансформаторы; 4 - пакет статора; 5 - пакет ротора; 6 - корпус (см. § 9-9), чтобы взаимная индуктивность обмоток статора и ротора изменялась по синусоидальному (косинусоидальному) закону в зависимости от угла поворота ротора. Напряжение к обмоткам ротора подводится (снимается) с помощью контактных колец и щеток или с помощью контактных пружин; во втором случае угол поворота ротора ограничен. За последние годы получили распространение ВТ, в которых питание к обмотке ротора подается с помощью кольцевого трансформатора (рис. 9-2). Электрическая схема четырехобмоточного ВТ приведена на рис. 9-3. В зависимости от схемы включения обмоток и их питания различают следующие основные режимы работы: I) синусно-ко-Рис. 9-3. Электри- синусный ВТ; 2) линейный ВТ; 3) ВТ - пре-ческая схема ВТ образователь координат; 4) ВТ в режиме фазовращателя; 5) трансформаторная синхронная передача на ВТ. Основные соотношения для этих режимов рассматриваются ниже (см. §9-2-9-5). Многополюсные ВТ применяются для дистанционной передачи угла по принципу электромагнитной редукции. Принцип электромагнитной редукции состоит в том, что период изменения выходного напряжения ВТ по амплитуде составляет 2п/р (где р - число  пар полюсов); т. е. за один оборот ротора напряжение ВТ проходит р периодов; р называют коэффициентом электромагнитной редукции. При одинаковых относительных погрешностях изменения выходного напряжения ВТ погрешность многополюсного ВТ, выраженная в угловых единицах, будет в р раз меньше, чем двухполюсного.  Рис. 9-4. Многополюсные ВТ с сосредоточенными обмотками (р = 128) В настоящее время для точных синхронных передач применяются ВТ с большим числом пар полюсов: р = 60- 180. Эти ВТ имеют сосредоточенные обмотки, которые выполняются на сплошном или шихтованном магнитопроводе. Для синусоидального изменения взаимной индуктивности обмоток статора и ротора в зависимости от угла поворота выбираются соответствующие ширина зубца и скос паза. Обычно ВТ с сосредоточенными обмотками имеют однофазную обмотку возбуждения на роторе и двухфазную обмотку синхронизации на статоре. На рис. 9-4 приведен общий вид многополюсного ВТ с сосредоточенными обмотками. Многополюсные ВТ с распределенными обмотками имеют сравнительно малое число пар полюсов (р = 2ч-4); по существу, в этих ВТ по расточке статора и ротора повторяется р раз двухполюсная машина. ВТ этого типа применяются в тех случаях, когда взаимное расположение статора и ротсфа четко не фиксировано или когда необходима передача угла в ограниченном диапазоне, например, угла качки судна относительно стабилизированной платформы. 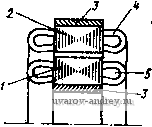 Рис. 9-5. Принципиальная конструктивная схема че-тырехполюсного ВТ бескорпусного исполнения / - пакет ротора; 2 - пакет статора; 3 - обоймы; 4 - обмотка статора; 5 - обмотка ротора Как правило, многополюсные ВТ выполняются в виде плоских машин с малым отношением активной длины пакета к диаметру расточки {1/D = 0,1 н-0,3). Магнитопроводы статора и ротора набираются из листовой электротехнической стали или пермаллоя и имеют суммарный скос пазов в противоположные стороны на одно зубцовое деление. На рис. 9-5 приведена принципиальная конструктивная схема ВТ с распределенными обмотками бескорпусного исполнения.  Рис. 9-6. Электрическая (а) и конструктивная (б) схемы двухфазного индукционного редуктосина Большое число различных модификаций вращающихся трансформаторов с электромагнитной редукцией Можно получить за счет использования зубцовых гармоник поля при различном числе  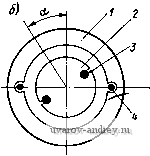 Рис. 9-7. Электрическая (а) и тсонструктнвная (б) схемы индукционного потенциометра / - статор; 2 - ротор; 3 - обмотка возбуждения; 4 - сигнальная обмотка зубцов на статоре и роторе. Такого рода ВТ получили название индукционных редуктосинов. Принципиальная схема одного из вариантов двухфазного индукционного редуктосина приведена на рис. 9-6. На статоре размещены первичная обмотка 1 и две вторичные 2 и 2, образующие двухфазную систему. Отношение числа зубцов статора и ротора равно 4/3. При повороте ротора происходит изменение магнитной проводимости воздушного зазора между зубцами статора и ротора таким образом, что со вторичных диффе- ренциальных обмоток снимаются два напряжения, изменяющиеся в зависимости от угла поворота со сдвигом 90°. Путем выбора линейных размеров зубцов можно получить изменение выходной ЭДС вторичных обмоток по закону, близкому к синусоидальному. Функциональные преобразователи и индукционные потенциометры представляют собой двухобмоточные ВТ, коэффициент трансформации обмоток которых изменяется по заданному (линейному) закону в зависимости от угла поворота ротора. Принципиальные электрическая и конструктивные схемы индукционного потенциометра (ИП) приведены на рис. 9-7. На роторе ИП расположена однофазная обмотка возбуждения, а на статоре - вторичная сигнальная обмотка. Выбирая закон распределения витков по пазам статора и ротора, можно получить желаемую функцию изменения взаимной индуктивности обмоток и, следовательно, закон изменения выходной ЭДС. Эта зависимость выходной ЭДС при изменении нагрузки вторичной обмотки ИП будет искажаться, поэтому ИП обычно проектируются на определенное сопротивление нагрузки, влияние которого на выходное напряжение учитывается путем выбора числа витков в секциях обмоток. 9-2. Синусно-косинусный ВТ Синусно-косинусный вращающийся трансформатор (СКВТ) преобразует угол поворота а в два переменных напряжения, амплитуды которых пропорциональны соответственно sin а и cos а. Наиболее просто это преобразование реализуется с помощью двухполюсного четырехобмоточного ВТ, описанного в предыдущем параграфе. Схема включения СКВТ приведена на рис. 9-8. Здесь / - обмотка возбуждения; k - квадратурная обмотка; а - косинусная обмотка; b - синусная обмотка. Принцип работы. При рассмотрении основных режимов работы СКВТ примем следующие допущения: 1) взаимная индуктивность обмоток статора и ротора изменяется по синусоидальному (косину-соидальному) закону; 2) обмотки на статоре (роторе) взаимно перпендикулярны; 3) потери в стали пренебрежимо малы; 4) собственные параметры обмоток статора и ротора попарно одинаковы и постоянны. Такой СКВТ называется идеализированным. Наиболее простым является режим холостого хода, (2иа =2нь = оо). При включении обмотки возбуждения в сеть переменного тока в воздушном зазоре машины образуется переменный продольный магнитный поток Ф^, ось которого совпадает с осью обмотки возбуждения. Этот поток индуцирует (рис. 9-9): ЭДС в обмотке возбуждения ЭДС в косинусной и синусной обмотках Ёа = -} Фйо^эф COS а = £ cos а; К = -/ -~г Фаэф sin а = £ sin а. V2 Здесь Wfsvi Шэф - эффективные числа витков обмотки возбуждения и вторичных обмоток; Е - действующее значение вторичной ЭДС, когда оси обмоток совпадают (а = 0). Отнощение К = ElEf =W3/wfa называется коэффициентом трансформации СКВТ.   Рис. 9-8. Электрическая схема СКВТ Рис. 9-9. В пояснение принципа работы СКВТ Уравнение ЭДС для обмотки возбуждения имеет вид Uf=: -Ef + ifoZf. Этому уравнению соответствует схема замещения, приведенная на рис. 9-10. Вторичная обмотка показана для случая, когда ее ось совпадает с осью обмотки возбуждения. Отнощение ifo / у к KEf f), \-\-Zfl(ixm) Рис. 9-10. Схема замещения двухобмоточного ВТ называется коэффициентом передачи СКВТ по напряжению. ЭДС квадратурной обмотки Ek в режиме холостого хода у идеализированного СКВТ равна нулю. При нагрузке вторичных обмоток СКВТ различными сопротивлениями Ъ^аФ электро- магнитные процессы существенно усложняются. Во вторичных об- мотках а и 6 появляются токи 1а и /( которые совместно с токами в обмотке возбуждения создают намагничивающие силы: 238 по продольной оси Pi = 0,9 ( ifo эф -f- /аШэф COS а 4- / ьОУэф sin а); по поперечной оси = 0,9 (-/аШэф sin а -f- Дшэф cos а). Этим намагничивающим силам будут соответствовать продольный и поперечный магнитные потоки и Ф,. СКВТ можно представить сее как совокуп- ность двух однофазных трех-обмоточных трансформаторов, соединенных по схеме рис. 9-11. Магнитный поток Фй, если пренебречь падением напряжения на собственном сопротивлении обмотки возбуждения, остается постоянным, и его можно найти из следующего уравнения Zf Wf
W since. Of=ifZf+i 2itf V2 ФаЩ эф: 2 Ф^Ш^эф. Рис. 9-11. Приведение СКВТ к двум однофазным трансформаторам Поперечный поток Ф, создается намагничивающей силой вторичных обмоток и в общем случае зависит от угла поворота ротора а: Ф^ = кР = 0,9Я, (- /аШэфsin а -f- /),Шэф cos а). Этот поток будет индуцировать во вторичных обмотках добавочную ЭДС, что приведет к искажению синусоидальной (косинусои-дальной) зависимости вторичных напряжений от угла поворота ротора а. При замкнутой накоротко квадратурной обмотке этот поток демпфируется и выходные напряжения сохраняют синусоидальную зависимость от угла поворота ротора при любых сопротивлениях нагрузки. В этом случае говорят, что в СКВТ выполнено первичное симметрирование; более точно физическое содержание этого понятия рассмотрено ниже. [Поперечный поток Фд равен нулю, если /а sin а =cos а. (9-1) Токи ia и if, определяются формулами: £ cos а Ё cos а Z + Za Ё sin а Ё sin а Z-fZ (, Zb где Z - собственное сопротивление вторичной обмотки. Подставив эти выражения в формулу (9-1), получим Za = Z. При этом условии, называемом условием вторичного симметрирования, вторичное напряжение изменяется в зависимости от угла поворота ротора по синусоидальному закону. Уравнения ЭДС СКВТ составляются по правилам, приведенным в § 1-2 для обобщенной электрической машины. Здесь в отличие от условий составления уравнений § 1-2 будем считать, что параметры обмоток не приведены к обмотке возбуждения. В этом случае в сопротивление взаимной индукции должен войти коэффициент трансформации. В матричной форме уравнения ЭДС имеют вид О jXm К cos а jxmK sin а k О Zk + iXm - jxmK sin а, jxmk cos a jXmK cos a - jxmK sin a Za + jXmK 0 jxmK sin a jXmK cos a, 0
(9-2) где Zf, Zk - собственные сопротивления обмоток возбуждения и квадратурной, включая внешние сопротивления; К - коэффициент трансформации; Хт - индуктивное сопротивление обмотки возбуждения; Za = Z + Z-&d, Zb = Z-\- Z b - сопротивления косинусной и синусной обмоток, включая сопротивление нагрузки. Решая уравнения (9-2) относительно токов,полу-чаем jijf 1-Л (Zfl-Zb)cosа iXmZb + A(Za - Zb) {Zk - Zf) cos2 a ik=Uf- jXmK + Zb Л/2 (Zfl - Zu) Sin 2 ,Zf + jXmZb jXmK + Zb ia = Uf- + A(Za-Zb)(Zk-Zf)COS - /С COS a Za(l + -4] + ZfK-V IXm ) K}(Zk~ Zf) (Za-Zb)... sina Zb(+-Л V IXm ) + ZkK h = Uf- Ksina Zb(\+ ~Л + ZfK~ \ IXm ) K4Zk-Zf){Za-Zb) где QXmK)- ZaZbZkI 1 + jXmK Zb jXmK jXm Zk Из полученных выражений следует, что выходные напряжения СКВТ йа = iaZsa Я Оь = IbZub Изменяются по косннусондальному и синусоидальному законам в зависимости от угла поворота ротора а при выполнении одного из следующих условий: условия первичного симметрирования Zf =Zk\ условия вторичного симметрирования Za = Zj. Из первой формулы (9-3) следует, что ток, потребляемый СКВТ, и его входное сопротивление не зависят от угла а, если Za ~ Zb, т. е. выполнено вторичное симметрирование. Точно так же можно показать, что выходное сопротивление вторичных обмоток СКВТ не зависит от угла а, если выполнено первичное симметрирование. Точность вторичного симметрировании (а при питании со стороны вторичных обмоток -- и первичного симметрирования) можно оценить по ЭДС квадратурной обмотки, которая определяется по формуле Ek = ikZk при -v оо . Подставляя сюда значение нз (9-3) и полагая, что Zb - Za € Za, получаем (Za~-Zb)Uf ЧХь sin 2а V IXmKA ]Хт \ Zb ). (9-4) Для анализа работы СКВТ в некоторых схемах целесообразно нз уравнений (9-2) исключить токи статора по формулам, приведенным в § 1-3. Уравнения ЭДС примут вид а K{Zk-Zf)sina V IXm JK IXm / (Zk - Zf) sin a cos a ri+ ZL.Vi+ Z) V IXm J\ IXm / K} {Zk - Zf) sin a COS a V IXm J\ IXm ) Zb + K{Zk - Zf)cosa V IXm JK IXm J
Of к COS l+Zf/{}Xm) Of К sina i+Zf{jXm) (9-5) Из этих уравнений следует, что при соблюдении условия первичного симметрирования Zf == Zk выходные обмотки СКВТ можно рассматривать как две независимые обмотки с выходным сопротивлением Zbux - Z -\- X+ZfKIXm) Ё = ~~ и ЭДС (рис. 9-12) - UfKcosa l + ZflUxm) Величины, характеризующие СКВТ как элемент автоматики и счетно-решающих устройств и определяющие efo применимость в той или иной схеме и точность работы, можно разделить на две группы. К величинам первой группы относятся: номинальное напряжение возбуждения Uf; частота сети /; коэффициент трансформации К; коэффициент передачи по напряжению Ки, входное и вы- Ф. I ходное сопротивление Zbx и Zbux; фазовый fj -] сдвиг между вторичной ЭДС и приложенным напряжением фе. Из схемы замещения, приведенной на рис. 9-10, получаем: сопротивление холостого хода Z/0 = Zf + jXm, сопротивление короткого замыкания е- 2л ZgblX Рис. 9-12. Схема СКВТ с исключенными обмоткой возбуждения и квадратурной обмоткой jXm+ZiK входное сопротивление при некотором сопротивлении нагрузки 7 7 , jXm(Z + Z)IK ZBX-Z.f-i--; выходное сопротивление . = Z iXm + Zf фазовый сдвиг между вторичной ЭДС и приложенным напряжением 9. = arg -= -argl Имея эти параметры, нетрудно определить любые электромагнитные величины, характеризующие работу СКВТ в схеме: потребляемые ток и мощность, выходное напряжение, оптимальную нагрузку и т. п. Наиболее важными для СКВТ являются величины второй группы, характеризующие его точность; они определяют, насколько реальная машина отличается от идеализированной. К этим величинам относятся: Относительная амплитудная погрешность воспроизведения синусоидальной зависимости вторичной ЭДС от угла поворота ротора (в процентах) (9-6) п .loo = iДa, 34,4 где Да - максимальная угловая погрешность, . . . . В зависимости от максимальной амплитудной отнбсительной погрешности, выраженной в процентах (от ± 0,005 до ± 0,3), СКВТ делят на 7 классов точности. Асимметрия нулевых точек, характеризующая неперпендикулярность обмоток статора и ротора СКВТ. Для ее определения ----з{£доб  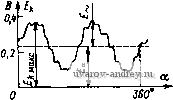 Рис. 9-13. Векторная диаграмма остаточной ЭДС ВТ Рис. 9-14. Зависимость ЭДС квадратурной обмотки от угла поворота ротора СКВТ поочередно возбуждается со стороны первичных обмоток, и затем определяются угловые положения ротора, при которых ЭДС вторичных обмоток равна нулю. Отклонение этих углов от значений, кратных 90°, представляет собой асимметрию нулевых точек СКВТ. Из формулы (9-6) следует, что для данного класса точности максимальная асимметрия (в минутах) не должна превосходить Ааас < 358, (9-7) где 8 - относительная амплитудная погрешность, %. Остаточная ЭДС в нулевых точках. Вследствие электрической и магнитной асимметрии магнитопровода от различных технологических причин при однофазном питании СКВТ образуется эллиптическое вращающееся магнитное поле, которое индуцирует во вторичных обмотках ЭДС, сдвинутую по фазе на некоторый угол по отношению к ЭДС от основного магнитного потока. Эта добавочная ЭДС может быть разложена на две составляющие (рис. 9-13): совпадающую по фазе с основной ЭДС и сдвинутую на 90°. Совпадающая по фазе ЭДС компенсируется поворотом ротора, что обусловливает асимметрию нулевых точек. Вторая же составляющая добавочной ЭДС не может быть скомпенсирована, она представляет собой остаточную ЭДС, которая состоит из ЭДС основной частоты и ЭДС высших гармоник, появляющихся от нелинейности кривой намагничивания магнитопровода. На работе СКВТ в компенсационных схемах главное влияние оказывает остаточная ЭДС основной частоты. Выраженная в процентах Е, она не должна превосходить половины амплитудной погрешности. ЭДС квадратурной обмотки. В идеальном СКВТ взаимная индуктивность перпендикулярных обмоток статора (ротора) должна отсутствовать. В действительности вследствие различного рода технологических погрешностей взаимная индуктивность обмоток не равна нулю, что приводит к появлению ЭДС на квадратурной обмотке при включении в сеть обмотки возбуждения. Эту ЭДС называют ЭДС квадратурной обмотки. Она состоит из основной гармоники, имеющей частоту сети, и высших временных гармоник. ЭДС квадратурной обмотки зависит от углового положения ротора и содержит постоянную составляющую, от углового положения ротора не зависящую, переменную составляющую с двумя периодами за один оборот ротора, и зубцовые гармоники (рис. 9-14). Кривая ЭДС квадратурной обмотки является весьма полезной при анализе качества изготовления магнитопровода СКВТ. Обычно для СКВТ как электрической машины задается максимальная ЭДС квадратурной обмотки, выраженная в процентах напряжения возбуждения. (9-8) Относительная разность коэффициентов передачи по напряжению косинусной и синусной обмоток (в процентах) Вследствие разницы в числе витков вторичных обмоток коэффициенты передачи по напряжению могут несколько отличаться. Это отклонение для данного класса точности не должно превосходить относительной амплитудной погрешности воспроизведения синусоидальной зависимости. Кроме указанных показателей погрешностей СКВТ вводят так называемые дополнительные погрешности, определяющие изменение выходной ЭДС при колебаниях напряжения, частоты и температуры в заданных пределах. Дополнительные погрешности характеризуют относительным изменением коэффициента передачи СКВТ Ки- ( Л3 . К Ки у и' \ ки /f \ ки /г Вещественная часть этих изменений определяет амплитудную * дополнительную ошибку, а мнимая часть - фазовую ошибку. 9-3. Линейный ВТ Принцип работы. Линейная зависимость выходного напряжения ВТ при малых углах поворота ротора достаточно удовлетворительно может быть получена на синусной обмотке. Однако при боль- , ших изменениях угла а (± 60°) хорошие результаты дают схемы четырехобмоточных ВТ с вполне определенным коэффициентом трансформации (рис. 9-15). Рассмотрим кратко принцип работы линейного вращающегося трансформатора (ЛВТ) с первичной симметрией (рис. 9-15, а). В этой схеме обмотка возбуждения ВТ и косинусная обмотка соединены последовательно и подключены к сети переменного тока, квадратурная обмотка замкнута накоротко, а синусная обмотка включена на нагрузку. Поперечный поток, появляющийся от токов в цепи нагрузки и в косинусной обмотке, демпфируется короткозамкнутой квадратурной обмоткой и может не учитываться. Считая, что ЭДС создается только продольным потоком и собственные параметры обмоток малы, будем иметь: для цепи возбуждения ЛВТ Uf = Ef + Ecosa = Ef (1 + /С cos а); для цепи нагрузки f/ = £ sin а = KEf sin а. Исключая отсюда Ef, получим U.KUf- sin а (9-9)   сим + /с cos а г, п 1 с -л Рис. 9-15. Электрические схе- Можно показать, что функция м^трей; б-со btSJhToI / (а) =-5HL- с точностью до симметрией 1 -(- т cos а 0,06 % совпадает с линейной функцией в диапазоне изменения угла а от - 60° до + 60°, если т = 0,536. Отсюда следует, что для ЛВТ необходимо выбирать СКВТ с коэффициентом трансформации К = 0,536. В действительности К имеет несколько большее значение (см. стр. 247), так как при выводе формулы (9-9) не учитывались собственные параметры обмоток. Отличительная особенность схемы ЛВТ с первичной симметрией - это независимость выходного сопротивления ЛВТ от угла поворота ротора, что обусловило широкое применение этой схемы в автоматических системах и счетно-решающих устройствах. Схема ЛВТ со вторичной симметрией (рис 9-15, б) является взаимной по отношению к схеме ЛВТ с первичной симметрией и согласно теореме взаимности, сформулированной применительно к четырехполюсникам, для нее имеют место аналогичные соотношения. Для ЛВТ ео вторичной симметрией входное сопротивление не зависит от угла поворота ротора а. 1 ... 9 10 11 12 13 14 15 ... 18 |
|||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |