


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 ... 7 8 9 10 11 12 13 ... 18 Минчанин, кбнсФантан и др.), который, как правило, ймее! низкий температурный коэффициент сопротивления (ТКС), т. е. др/р примерно на три порядка меньше Aif)/t3. Это означает, что в ТА на температурную погрешность основное влияние оказывает изменение активного сопротивления обмотки возбуждения. При этих условиях выражения (7-35) можно существенно упростить ет= - Заменяя Aij)/i3 на а^ДГ, где - ТКС обмотки возбуждения, получим 8,== - (1-1-1)-1- (1+1) cziAT; aiAT. (7-36) Уменьшение температурных погрешностей ТА может быть достигнуто различными методами, среди которых можно указать ме- тоды, описанные в работе [32]: а) выбор рациональной консЕрукции ТА, при которой относительный параметр i)? будет минимальным; б) применение в качестве материала ротора сплавов с отрицательным температурным коэффициентом сопротивления; в) включение в цепь возбуждения терморезисторов с отрицательным ТКС; г) регулировку схемы интегрирующего привода, в котором наиболее часто применяются ТА, например путем выбора фазы опорного напряжения усилителя или параметров цепи компенсации. Погрешности ТА от изменения частоты сети. Для определения этих погрешностей от изменения частоты сети формулу для ЭДС генераторной обмотки (7-18) представим в виде (членом bv в знаменателе пренебрежем) 60 1 (7-37) От частоты сети в этом выражении зависит коэффициент а, опре* деляемый по (7-34) через параметры ij) и Р; при этом, очевидно, что Из формулы (7-37) получаем / А£г Л { Да Выражая через (-) {~f~)f формулу для определения (-! ) . Опуская громоздкие алгебраи- V ёг Jf ческие преобразования, приведем окончательное выражение Ч £г Л Г hi-)] (7-38) Относительная погрешность от изменения частоты существует, даже если собственные параметры обмотки возбуждения равны нулю; полагая в (7-38) ij) = = О, получаем (7-39) Следует отметить, что в компенсационных схемах частотная погрешность проявляется незначительно. Это объясняется тем, что для согласования по фазе ЭДС генераторной обмотки с напряжением задающего элемента в выходную цепь последнего включается фазосдвигающее устройство, представляющее собой цепочку RC (рис. 7-21); изменение напряжения от частоты на выходе этой цепочки описывается формулой, аналогичной (7-39). Действительно, задающее напряжение - напряжение на конденсаторе f/з = f (l + j2nfRC), а его относительное изменение при колебаниях частоты сети Рис. 7-21. Фазо-сдвигающая цепочка (7-40) что совпадает с формулой (7-39) при р = l/{2nfRC). На самом деле вследствие наличия собственных параметров обмотки возбуждения определенная погрешность от изменения частоты остается даже в компенсационных схемах. 7-7. Зависимость основных характеристик ТА от параметров машины В предыдущих параграфах были приведены выражения для основных величин, характеризующих ТА: крутизны ЭДС генераторной обмотки, входных и выходных сопротивлений, погрешностей от различных причин.- Рассмотрим зависимость этих величин от параметров ТА как электрической машины. Крутизна ЭДС генераторной обмотки. Выражение для крутизны ЭДС ТА (в милливольтах иа оборот в минуту) запишем в виде е- = К1СР . -коэффициент трансформации генераторной обмотки и где К = обмотки возбуждения. Подставляя сюда модуль Яг нз (7-37), находим KaU, (7-41) где согласно выражению (7-34) {[Р+2ф + (р- l/p)f-f [1-f 2-г|,(р- 1/р)Г i2l 1/2 ex Поскольку из условия получения малой скоростной погрешности параметр Р должен быть достаточно большим, то единственным способом повышения крутизны ЭДС ТА является увеличение коэффициента трансформации. Однако и здесь возможности ограничены, так как при этом (пропорционально К^) растет выходное сопротивление генераторной обмотки, что Р^т нежелательно при работе в компеисаци-оииых схемах из-за сильного влияния внешних помех. По указанным причинам крутизна ЭДС счетно-решающих ТА сравнительно невелика и находится в зависимости от габаритов в пре- - мВ делах от 1 до 5 т Рис. 7-22. Схема замещения ТА при неподвижном роторе об/мин Входное сопротивление и потерн ТА. Из формулы (7-22) следует, что при Z>Xm входное сопротивление ТА практически остается постоянным при изменении относительной скорости ротора в пределах от О до 0,3 и может определяться для большинства режимов работы при неподвижном роторе по формуле (7-15) при w = О как 2зх = Zb -Ь Z = гв -Ь /хв, + вводя относительные параметры, находим (7-42) Тот же результат можно получить по схеме замещения, приведенной иа рис. 7-22. Суммарные потери в ТА практически равны потерям в активных сопротивлениях обмоток возбуждения и ротора и определяются по формуле 1/в ReZBX = (7-43) Это выражение может быть использовано при предварительном расчете ТА для определения его индуктивного сопротивления намагничивания н обмоточных данных. Погрешности ТА от изменения скорости. Эти погрешнооти определяются выражениями (7-32) и (7-33). Для их оцеикн найдем зависимости fcj = Re b и 62 = Im 6 от относительных параметров if, н р. Полагая, что ( С р и I < Р, нз второй формулы (7-21) находим m-lf± (7-44) [i + lf + VW [(1 + )+]р* (7-45) Отсюда следует, что амплитудная погрешность ТА от изменения скорости зависит как от индуктивного сопротивления рассеяния, так и от активного сопротивления обмотки возбуждения, а фазовая погрешность - главным образом от активного сопротивления обмотки. Радикальным средством уменьшения скоростных погрешностей является увеличение параметра р, т. е. активного сопротивления ротора. В счетно-решающих ТА р выбирается в пределах 3-6. Одним из способов уменьшения скоростной погрешности является снижение величины 00= = где По - максимальная частота вращения ТА, об/мнн. Для этого следует увеличивать частоту f и уменьшать число пар полюсов. Уменьшать число пар полюсов до двух нецелесообразно, так как при р = 1 возрастает остаточная ЭДС (см. стр. 185). Увеличение частоты свыше 1000 Гц невозможно, так как при этом ухудшаются характеристики асинхронных двигателей, применяемых в интегрирующих приводах. По указанным причинам счетно-решающие ТА выполняются, как правило, иа частоте 400-500 Гц при р = 2. Температурные погрешности ТА. Зависимости амплитудных и фазовых температурных погрешностей ТА (7-36) от относительных параметров были получены в предыдущем параграфе. Основным параметром, определяющим температурные погрешности, является относительное активное сопротивление обмотки возбуждения (сопротивление ротора на иих практически ие влияет). При проектировании ТА с минимальными погрешностями от изменения температуры следует выбирать конструктивную схему ТА с наибольшей площадью под обмотку статора. Остаточная ЭДС, как уже указывалось, обусловлена технологическими иеточиостямн при изготовлении ТА. Постоянная составляющая остаточной ЭДС возникает из-за иеперпеидикуляриостн осей обмоток, наличия коротко-замкнутых витков в магнитопроводах и емкостной связи между обмотками. Наименьшую постоянную составляющую остаточной ЭДС имеют ТА с обмотками, разнесеииыми на виешинй и виутреииий магнитопроводы (см. рис. 7-5, в). Переменная составляющая остаточной ЭДС вызывается электрической асимметрией ротора н с ростом числа пар полюсов ТА уменьшается. Поскольку в счетно-решающих ТА число пар полюсов не может быть больше двух, то при изготовлении роторов этих ТА должны быть предусмотрены специальные технологические меры для обеспечения их электрической симметрии. 7-8. ТА с компенсацией изменения магнитного потока В связи с развитием электроинкн н снижением габаритов усилителей разрабатываются ТА, в которых с помощью дополнительных обмоток и электронной схемы производится компенсация поперечного потока или стабилизация продольного магнитного потока возбуждения. В том и другом случае удается получить принципиально линейную зависимость выходной ЭДС от угловой скорости. Принципиальная электрическая схема ТА с компенсацией поперечного магнитного потока приведена иа рис. 7-23. ТА этого типа по поперечной оси имеет две обмотки: /С и С, соединенные параллельно через электронный усилитель с достаточно большим коэффициентом усиления. При появлении в ТА поперечного магнитного потока в^сигнальной обмотке С индуцируется- ЭДС, которая подается иа вход усилители. Выходные зажимы усилителя подключены к компенсационной обмотке К таким образом, что,создаваемая ею НС компенсирует намагничивающую силу обмотки ротора q, образующую поперечный магнитный поток. Составим уравнения ЭДС ТА с компенсацией поперечного магнитного потока. Сигнальная обмотка С включена иа усилитель с большим входным сопротивлением, ток в ней мал, и при составлении уравнений ЭДС эту обмотку можно не учитывать. При этом условии уравнения ЭДС будут аналогичны уравнениям обычного ТА (7-9). Разница будет состоять в наличии в цепи обмотки К. приложенного напряжения, равного - jXmKi (/к + /</): d q  Рис. 7-23. Электрическая схема ТА с компенсацией поперечного магнитного потока В К
где Ki - коэффициент усиления усилителя. Перенося член - jXmKi (Iк + tg) в леную часть и деля строку Ki на 1 -Ь Ки Получаем К d q О jXm О В К В Zb + jXm О VXm - VXm }Xm + JXn r + lxm VXm - vx r + jXm
(7-46) Уравнения ЭДС tA с компеисацней поперечного потока соййаДаЮ* с уравнениями ЭДС ТА под нагрузкой (7-9) при замене в них сопротивления цепи генераторной обмотки Zp иа Zj{l + Ki)- Используя формулу (7-13), найдем выражение для напряжения обмотки компенсации К Ut> -XmZv Uk = /kZk = -4V- f 2n + Zb-Zb( vA + Zn (Zb + Zn) 1 -t- Ai L V Z / J При большом коэффициенте усиления (/Ci > - 10*) первым членом в знаменателе можно пренебречь; тогда получим Uk=Ub XmZv. Z(ZB-f Zn) (7-47)  Отсюда следует, что напряжение иа выходе ТА в зависимости от скорости ротора изменяется линейно. Как было показано в § 7-3, основной причиной нелинейности зависимости выходной ЭДС ТА от скорости является изменение магнитного потока, обусловленное появлением ЭДС вращения в продольном контуре ротора. С помощью электронного усилителя и вспомогательной сигнальной обмотки С можно стабилизировать продольный магнитный поток. Электрическая схема такого ТА приведена иа рис. 7-24. Пренебрегая током в сигнальной обмотке С, составим уравнения ЭДС ТА, отличающиеся от уравнений (7-9) только напряжением иа обмотке возбуждения: Рис. 7-24. Электрическая схема ТА со стабилизацией продольного магнитного потока
Перенося член - \ХтКх (h + Id) в левую часть и деля первую строку иа 1 -\- Ki, получаем
Уравнения (7-48) совпадают с уравнениями ЭДС (7-9) обычного ТА при замене в иих Zb на--- и Us на--- /в Us- Это означает, что 1 + 1 i + Ki введение усилителя эквивалентно уменьшению собственных параметров обмотки возбуждения в 1 + раз. Используя формулу (7-13), найдем напряжение на генераторной обмотке f/r = /rZH = Un(Z IZ)XmZnV При достаточно большом коэффициенте усиления (Ki > -т- 10*) членом Zj(l -- /fi) в знаменателе можно пренебречь; тогда получим l+(Zr+Zn)/Z В частности, для режима холостого хода (Zg = оо) иг г + ix (7-49) (7-50) Полученные формулы указывают на принципиальную возможность линейной зависимости выходной ЭДС от скорости при стабилизации продольного магнитного потока. 7-9. тахогенераторы постоянного тока В качестве тахогенераторов постоянного тока (ТП) использукэтся электрические машины постоянного тока малой мош,ности с возбуждением от постоянных магнитов или независимым электромагнитным возбуждением. Это, как правило, двухполюсные машины без добавочных полюсов, у которых для повышения линейности зависимости выходного напряжения от угловой скорости предусмотрены определенные конструктивные меры (рис. 7-25): 1) скос пазов якоря на одно зубцовое деление с целью исключения пульсаций магнитного потока; 2) шихтованные пакеты статора и ротора для уменьшения потерь от вихревых токов; 3) большое число коллекторных пластин, специальные щетки и материал коллектора для снижения пульсаций выходной ЭДС и надежного контакта; 4) выбйр относительно большого значения t/D с целью снижения момента инерции ротора и момента трения в опорах. Для исключения пульсаций магнитного потока и потерь от вихревых токов в некоторых типах ТП применяется полый якорь в виде пластмассового стакана с запрессованной в него обмоткой йкоря (рис. 7-26). Обычно такая конструкция машины выпблняется при возбуждении от постоянных магнитов, так как воздушный зазор в этом ТП довольно большой и при электромагнитном возбуждении была бы необходима значительная НС обмотки. Рассмотрим основные величины, характеризующие работу ТП.  Рис. 7-25. Конструктивная схема ТП с барабанным якорем ; - вал; 2 - подшипник; 3 - магнитопровод статора (яв-нополюсный); 4 - якорь с обмоткой; 5 - обмотка возбуждения; 6 - корпус 7 - подшипниковый щит; 8 - щетка; 9 - коллектор Выходная характеристика ТП - это зависимость напряжения на якоре от скорости и сопротивления нагрузки. Найдем эту зависимость для идеального ТП, у которого магнитный поток полю- 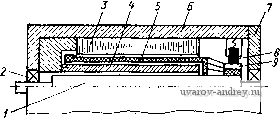 Рис. 7-26. Конструктивная схема ТП с полым якорем / - вал; 2 - подшипнлк; 3 - кольцевой магнитопровод статора; 4 - постоянный магнит с цилиндрическим отверстием; 5 - полый якорь; * - корпус; 7 - подшипниковый щит; 8 - щетка; 9 - коллектор СОВ постоянен, реакция якоря и коммутационных токов пренебрежимо мала, а падение напряжения в щеточном контакте равно нулю. Уравнение ЭДС цепи якоря f/и..д == Eo-Ir. Но = СФоЮр; / = U /Rs. Отсюда Шр. (7-51) На рис. 7-27 штриховой линией проведены зависимости f/ид = = / (tup) для идеального ТП при различных R- В действительности 7 Заказ № 678 сформулированные выше донущения для идеальных ТП в реальных ТП не выполняются, что приводит к искажению линейной зависимости, которое тем больше, чем ниже сопротивление нагрузки (сплошные кривые на рис. 7-27). Погрешности ТП и методы их уменьшения; Отклонение выходной характеристики от линейной называется основной погрешностью ТП. Она обусловлена реакцией якоря и коммутационными токами, ослабляющими магнитный поток полюсов, а также падением напряжения под щетками. Для оценки этой погрешности составим уравнение ЭДС ТП с учетом указанных факторов: f/ = CO(0p-7гз -Af/m. (7-52) Считая магнитную цепь ненасыщенной, можно принять Ф = Фо-Фра = Фо-, ; ° тп Р^- где - коэффициент пропорцио- РИСТИКИ 111 нальности. Подставляя последнее выражение в (7-52) и заменяя / на U/Rn, получаем и 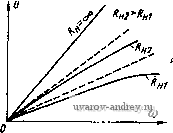 f/==COo(Op- Решая это уравнение относительно U, находим [/- СФрЮр - At/щ ~ 1 + ГаШн + (Cki/Rn) Шр Полагая, что {CkJR шр < 1, будем иметь 1 + Га ?н V Ta + Rn ) (7-53) Относительную погрешность выходной характеристики ТП определим по формуле = (ид-f/)/f/Hfl. макс Подставляя сюда выражение (7-53) и пренебрегая членом -S-i-H-, получаем Га + /?н (7-54) щ СФоЮр., ФоЮр. макс (Га + Ra) где Юр. макс - максимальная угловая скорость ротора ТП. Для уменьшения первой составляющей погрешности применяются металлизированные щетки с малым падением напряжения переходного контакта Af/щ; в прецизионных ТП коллектор выпол- няют из коррозионно-стойких материалов (никель, серебро). Вторая составляющая основной погрешности может быть уменьшена применением добавочных полюсов, увеличением воздушного зазора, выбором формы полюсных наконечников и ширины щеток. В ТП с постоянными магнитами влияние реакции якоря и коммутационных токов можно снизить выбором соответствующего положения рабочей точки на кривой возврата магнита. На работу ТП постоянного тока существенное влияние оказывают технологические погрешности, обусловленные несимметрией воздушного зазора (эксцентриситет, различие в магнитных свойствах полюсов) и неточностью скоса пазов. Несимметрия воздушного зазора приводит к пульсациям выходной ЭДС с частотой, равной или кратной угловой скорости ротора. Эти пульсации называют 6 т  Рис. 7-28. Схема температурной компенсации ТП Рис. 7-29. Стабилизация магнитного потока с помощью теплочувстви-тельиого магнитного шунта полюсными в отличие от оборотных пульсаций ЭДС, вносимых соединительной муфтой. Для уменьшения полюсных пульсаций применяют специальную технологию: шлифовку поверхности якоря в собственных подшипниках, расточку полюсов в сборке со станиной, обработку посадочных поверхностей под подшипниковые щиты с одной установки на станке, веерную сборку якоря, специальную шихтовку полюсов и т. п. Зубцовые пульсации ЭДС связаны с колебаниями магнитной проводимости полюса из-за наличия пазов на якоре. Угловая частота пульсаций равна ZpWp. Для уменьшения зубцовых пульсаций увеличивают воздушный зазор, применяют скос паза по винтовой линии на одно зубцовое деление, а также магнитные клинья. Отмеченные технологические погрешности ТП практически отсутствуют в ТП с полым якорем: по этой причине прецизионные ТП выполняются с якорем в виде пластмассового стакана с ЪбмочР-кой из тонкого провода. Кроме основной и технологической погрешности ТП существует дополнительная погрешность, обусловленная главным образом изменением температуры окружающей среды. Для уменьше- НИЯ этой погрешности в ТП с электромагнитным возбуждением последовательно с обмоткой возбуждения включается терморезистор с отрицательным температурным коэффициентом (рис. 7-28) или же применяются теплочувствительные магнитные шунты МШ (рис. 7-29), изготовленные из сплавов, изменяющих свою магнитную проводимость при нагреве машины; с ростом температуры сопротивление магнитного шунта растет, что приводит к стабилизации потока, замыкающегося через якорь. Тахогенератор постоянного тока имеет определенные преимуществами недостатки по сравнению с асинхронным тахогенератором. Основные преимущества ТП: 1) отсутствие остаточной ЭДС при неподвижном роторе; 2) работа в компенсационньис схемах без фазирования выходной ЭДС; 3) большая крутизна выходной ЭДС; 4) более простые методыкомпенсации температурных погрешностей. Недостатки: 1) наличие щеток и коллектора приводит к снижению срока службы и надежности ТП; 2) в процессе коммутации в выходных цепях появляются высокочастотные помехи, ограничивающие применение ТП в некоторых схемах; 3) большой момент сухого трения, что исключает применение ТП постоянного тока в прецизионных интеграторах. 7-10. Синхронные тахогенераторы Синхронные тахогенераторы по принципу действия аналогичны обычным синхронным генераторам, используемым для преобразования механической энергии в электрическую. В качестве тахогенераторов наиболее часто применяются два Типа синхронных машин: синхронные генераторы с магнитоэлектрическим возбуждением и f индукторные генераторы повышенной частоты с электромагнитным возбуждением. Принципиальные схемы указанных тахогенераторов. приведены на рис. 7-30 и 7-31. Обмотки статора выполняются однофазными или трехфазными. , Однофазные обмотки применяются в тахогенератор ах, у которых^ выходной величиной, характеризующей - скорость ротора, является частота ЭДС. Трехфазные обмотки [целесообразно применять в тахогенераторах, выходной величиной которых является напряжение-на зажимах при заданном сопротивлении нагрузки; в этом случае напряжение предварительно выпрямляют с помощью полупроводниковых диодов. В синхронных тахогенераторах, выполненных по типу обычных синхронных машин, наблюдаются те же основные погрешности,  Рис 7-30. Принципиальная конструктивная схема синхронного тахогенератора ЧТО и В ТП: зависимость выходной ЭДС от нагрузки, низкочастотные пульсации ЭДС от несимметрии воздушного зазора, зубцовые пульсации, зависимость ЭДС от изменения температуры. Для уменьшения этих погрешностей применяются такие же меры, как и в ТП.  Рис, 7-31. Индукторный тахогенератор повышенной частоты / статор; 2 - ротор; 3 - обмотка возбуждения; 4 - генераторная обмотка В индукторных тахогенераторах повышенной частоты низкочастотные пульсации практически отсутствуют, а зубцовые пульсации благодаря их высокой частоте могут быть сглаже-ныс помощью малоинерци-ониого /?С-фильтра. Для уменьшения зависимости ЭДС от изменения температуры рабочвя точка кривой намагничивании (Л на рис. 7-32) выбирается в зоне насыщения. Рис. 7-32. Характеристика намагничивания индукторного генератора Внешняя характеристика индукторного тахогенератора так же, как и обычного синхронного,- резко падающая, поэтому тахогенераторы этого Типа должны;работать на постоянное сопротивление нагрузки. Теоретические основы работы у синхронных тахогенераторов и у синхронных генераторов обычного исполнения одни и те же и хорошо известны из общего курса электрических машин, поэтому в настоящей книге они не рассматриваются. 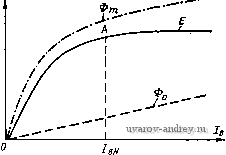 Гяввв восьмая СЕЛЬСИНЫ 8-1. Общие сведения Системы, используемые для дистанционной передачи угла, называются синхронными передачами. Они состоят из датчика, приемника и линии связи между ними. По своим функциям синхронные передачи разделяются на индикаторные, имеющие на валу приемника только указатель, и измерительные, предназначенные для измерения и индикации угла рассогласования между валами датчика и приемника. /4 i  В Рис. 8-1. Электрическая схема однофазного сельсина f - обмотка возбуждения (управления); ABC - трех, фазная обмотка синхронизации Рис. 8-2. Электрическая схема дифференциального сельсина В завис1Шости от рода тока различают синхронные передачи на постоянном токе, многофазном переменном и однофазном переменном токе. Синхронная передача называется самосинхронизирующейся, если каждому положению вала датчика соответствует вполне определенное положение вала приемника. В автоматике наибольшее распространение получили самосинхронизирующиеся передачи на однофазном переменном токе. Сельсинами называют индукционные электрические машины, используемые в самосинхронизирующихся синхронных передачах однофазного переменного тока. В зависимости от функций, выполняемых сельсинами в системах синхронной связи, различают: сельсины-Датчики (СД), индикаторные сельсины-приемники (СП), трансформаторные сельсины-приемники, дифференциальные сельсины-датчики и сельсины-приемники. По конструкции первые три группысельсинов практически идентичны; они имеют обычно трехфазнуюсинхронизирующую обмотку на статоре и однофазную] обмотку возбуждения f или управления (для третьего типа) на роторе (рис. 8-1). Дифференциальные сель- сины имеют трехфазные обмотки как на статоре, так и на роторе (рис. 8-2). С целью самосинхронизации сельсины выполняются как двухполюсные электрические машины. По типу токоподвода к ротору сельсины делятся на контактные и бесконтактные В контактных сельсинах токоподвод к обмотке ротора осуществляется с помощью контактных колец и щеток (рис. 8-3). В бесконтактных сельсинах наибольшее распростра- 78 9 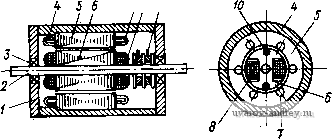 Рис. 8-3. {Коиструктивиаясхема ковтактиого сельсина / - крышки; 2 - вал; 3 - подшипник; 4 - корпус; 5 - пакет статора; 6 - пакет ротора; 7 - трехфазная синхронизирующая обмотка; в - обмотка возбуждения; 9 - контактное кольцо со щеткой; 10 - демпферная обмотка нение получили две модификации: неявнополюсные сельсины с кольцевым трансформатором и явнополюсные сельсины конструкции Иосифьяна-Свечарника. Неявнополюсный сельсин с кольцевым трансформатором (рис. 8-4)имеет^магн итопровод статора^с трехфазной обмоткой син- ************ хронизации и неявнополюсный магиитопровод ротора, в пазах которого размещается однофазная обмотка, соединенная по схеме, указанной на рис. 8-18. В отличие от ротора контактного сельсина здесь обмотка ротора соединяется с выводными зажимами с помощью кольцевого трансформатора (КТ), магиитопровод которого выполнен из составных шихтованных сердечников или феррита. Бесконтактный сельсин конструкции Иосифьяна 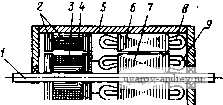 Рис. 8-4. Бесконтактный неявнополюс ный сельсин с кольцевым трансформатором / - вал ротора; 2 - магиитопровод кольцевого трансформатора (КТ); 3 - вторичная обмотка КТ; 4 - первичная обмотка КТ; 5 - корпус; в - пакет статора; 7 -пакет ротора; S - обмотка снихроиизацин; 9 обмотка возбуждения Свечарника (рис. 8-5) имеет такой же статор (7), что и контактный сельсин. Ротор [5) явнополюсный, состоит из двух Г-образных шихтованных магнитопроводов, соединенных немагнитным заполнителем - пластмассой или алюминиевым сплавом (6); обмотка возбуждения (2) выполнена йз двух кольцевых катушек, ойа создает НС, направленную по оси сельсина. Для замыкания магнитного потока возбуждения предусмотрены два кольцевых магнитопровода (1) и внешние магнитопроводы (5). Пути магнитного потока сельсина указаны стрелками. По отношению к статору ротор представляет собою двухполюсную систему: при повороте ротора поворачивается ось магнитного потока, обмотка же возбуждения остаётся неподвижной. Поскольку магнитный поток пересекает листы пакетов статора и кольцевых магнитопроводов, то для исключения в них короткозамкнутых токов предусмотрены разрезы (8), см. также рис. 8-20.  Рис. 8-5. Бесконтактный явнополюсный сельсин конструкции Иосифьяна-Свечарника / - кольцевой магнитопровод; 2 - обмотка возбуждения; 3 - внешний магнитопровод; 4 - трехфазная обмотка синхронизации; 5 - ротор; 6 - пластмассовый заполнитель; 7 - статор; 8 - разрез В системах синхронной передачи сельсины возбуждаются однофазным переменным током, поэтому в каждом нз сельсинов независимо от его функции образуется пульсирующий магнитный поток, индуцирующий в обмотках синхронизации трансформаторную ЭДС, пропорциональную косинусу угла (а) между осью фазы обмотки синхронизации и направлением магнитного потока. Так, например, при питании обмотки возбуждения сельсина переменным током (рис. 8-6) ЭДС, индуцируемые в фазах обмотки синхронизации, выражаются формулами: Ёа = £ф cos а; £в = фС08(а-120°); [ (8-1) £с = .ЁфСО8(а + ,120°), где ф - наибольшее значение ЭДС фазы. ЭДС на зажимах обмотки синхронизации получается как разность соответствующих фазных ЭДС: Ядв=£в-£л = У^£ф8ш(а-60°); Ёвс== Ёс-Ёв==- V Esma; £сл = -4 = £фsin (ос + 60°). (8-2) А к л Д ССп   Рнс. 8-6. Образование трансформаторных ЭДС в однофазном сельсине Рнс. 8-7. Электрическаи схема индикаторной синхронной передачи В индикаторной синхронной передаче (рис. 8-7) обмотки возбуждения однотипных датчика и приемника подключают к одной сети переменного тока. В согласованном положении, когда обмотки возбуждения датчика и приемника занимают одинаковое положение по отношению к соответствующим трехфазным обмоткам, токи в цепи синхронизации отсутствуют, так как ЭДС на обмотках датчика и приемника одинаковы. При рассогласовании датчика и приемника на некоторый угол. 6 = осд- в цепи синхронизации появляются уравнительные токи. В результате взаимодействия их с магнитными потоками приемника возникает синхронизирующий момент, под воздействием которого приемник приходит в согласованное положение с датчиком. Поскольку синхронизирующий момент появляется за счет электромагнитных процессов В' системе синхронной передачи, то индикаторную синхронную передачу иногда называют системой синхронной передачи с внутренней синхронизацией. Работу сельсина-приемника в индикаторной синхронной передаче характеризуют следующими величинами: 1) зависимостью синхронизирующего момента от угла рассогласования 9 (рис. 8-8); г.\ ч dM 2) максимальным Мст и удельным е=о синхронизи- рующим моментом (удельный синхронизирующий момент определяют обычно как момент, приходящийся на единицу угла рассо- гласования (6 = Г); 3) максимальной статической ошибкой синхронной передачи в режиме поворота; 4) максимальной динамической ошибкой синхронной передачи в режиме вращения по определенному закону; 5) максимальной скоростью, при которой динамическая ошибка находится в допустимых пределах; 6) временем согласования датчика и приемника после начального рассогласования на 180°. Кроме указанных величин, как для датчика, так и для приемника должны быть заданы: 1) номинальные напряжение возбужде-  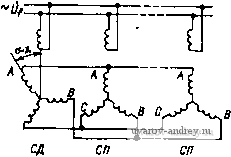 Рис. 8-8. Кривая синхро- Рис. 8-9. Схема параллельной работы визирующего момента сель- сельсинов в индикаторном режиме сина-приемника ния И частота сети; 2) максимальная вторичная ЭДС; 3) потребляемые токи и мощность при номинальных напряжении возбуждения и частоте.  Рис. 8-10. Система индикаторной синхронной передачи с дифференциальным сельсином-приемником Индикаторная синхронная передача может быть выполнена для параллельной работы нескольких приемников от одного датчика (рис. 8-9) и Для работы дифференциального сельсина-приемника (электрического дифференциала ЭД) от двух датчиков (рис. 8-10). Ё трансформаторной синхронной передаче (рис. 8-11) обмотка возбуждения сельсина-датчика подключена к сети переменного тока. Вторичные ЭДС представляют собой электрические сигналы, которые передаются по цепи синхронизации от датчика к прием-  Р Рис. 8-11. Электрическая схема трансформаторной синхронной передачи Рис. 8-12. Система синхронной передачи с внешней синхронизацией 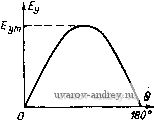 пику. В приемнике трехфазная обмотка создает магнитный поток, ось которого занимает по отношению к трехфазной обмотке такое же положение, как и у датчика. При повороте ротора датчика на такой же угол поворачивается магнитный поток приемника;, этот угол поворота можно зафиксировать по значению ЭДС управляющей обмотки приемника Ёу. За согласованное положение датчика и приемника принимается такое положение, при котором ЭДС управляющей обмотки равна нулю. ЭДС управляющей обмотки после усиления ее усилителем (У) используют для управления реверсивным электродвигателем Дв, приводящим сельсин-приемник в согласованное положение (рис. 8-12). Иногда такого рода систему синхронной передачи называют системой с внешней синхронизацией. Работу сельсина-приемника в системе трансформаторной синхронной передачи характеризуют следующие величину: 1) максимальное значение и крутизна ЭДС управляющей обмотки (рис. 8-13); крутизну ЭДС обычно выражают в вольтах на градус; 2) выходное сопротивление управляющей обмотки; 3) удельная мощность в оптимальном режиме; под этой величиной понимают мощность, выделяемую в активном сопротивлении, равном выходному сопротивлению управляющей обмотки, при рассогласовании Г; 4) максимальная статическая погрешность в режиме поворота; 5) скоростная погрешность в режиме вращения с некоторой постоянной скоростью; 6) остаточная ЭДС управляющей обмотки. Рис. 8-13. Зависимость ЭДС управляющей обмотки от угла рассогласования Сельсины-даййКи, ЙбйольУемые в йндЙка#о^ йУх и трйнсфо^* матерных синхронныхпередачах, характеризуются следующими данными: 1) потребляемыми током и мощностью при номинальных напряжении и частоте; 2) допустимым числом параллельно подключаемых приемников; 3) асимметрией нулевых точек, под которой понимают максимальное отклонение нулевых точек от угловых положений ротора, кратных 60°,- при которых линейная ЭДС синхронизирующей обмотки равна нулю; 4) разницей во вторичных ЭДС. 8-2. Упрощенная теория индикаторной синхронной передачи Принципиальная электрическая схема индикаторной синхронной передачи приведена на рис. 8-7. Будем для простоты считать, что датчик и приемник - однотипные сельсины. Токи в цепи синхронизации и моменты на приемнике и датчике возникают при наличии угла рассогласования 0 = осд-а„; при этом момент зависит только от угла рассогласования 6 и не зависит от углового положения роторов датчика и приемника д и а„. Поэтому для анализа электромагнитных процессов в цепи синхронизации выберем такое положение роторов датчика и приемника, при котором выражения для токов оказываются наиболее простыми. Для определения этого положения рассмотрим выражения для ЭДС, действующих в фазных цепях обмотки синхронизации: АЕа = Ёап-Еал^Еф (cos п-cos д) = 2£ф si п =2£ф81п п -f д xsin- А£в = £s п - £s д = 4 [cos ( п - 120°)-cos ( д - 120°) ] = = 2£ф sin + -120°) sin = A£r = = 2Ёф sin + -120°) sin Ёсп-ЁсЁф [cos (a + 120°) - cos (a + 120°)] = = 2£ф sin + +120°) sin = д + п = 2£ф sin ( + + 120°) sin -J-. Полученные выражения показывают, что ЭДС в фазных цепях пропорциональны sin (0/2) и зависят от полусуммы углов датчика и приемника (оСд + а„)/2. Выражения для ЭДС существенно упро- стятся, если принять ( д -J- а„)/2 = 90*, Т. е. ббд = 90° + 0/2, а а„ = 90° - 0/2. Электрическая схема, соответствующая этому положению роторов, приведена на рис. 8-14, а; в отличие от схемы, данной на рис. 8-7, -здесь введен в цепь синхронизации нулевой провод, который, как будет показано ниже, имеет чисто условное значение. Имеем А£д-2£ф81п-; А£в= - £фsiп-АЁс= - £фsiп СД (8-3)
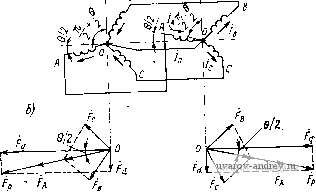 Рис. 8-14. Токии НС датчика и приемника при рассогласовании на угол 6: а - направление токов в обмотках сельсинов; 6 - векторные диаграммы НС Уравнительные токи, протекающие в фазах, будут 1а = /в=1= -isin-
(8-4) 1 ... 7 8 9 10 11 12 13 ... 18 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |