


|
|
|
|
Главная страница » Электрика в театре » Коэффициент форсировки систем 1 2 3 4 ... 18 коэффициент форсировки систем автоматики Электрическими машинами малой мощности называют электрические машины, мощность которых составляет диапазон от долей ватта до 1000 Вт. Среди этой группы машин иногда выделяют электрические машины, мощность которых не превосходит 10 Вт, а габаритные размеры 6-8 см. За последние десятилетия область применения электрических члашин малой мощности значительно расширилась, сейчас она охватывает все отрасли промышленности, сельского хозяйства, быта и специальной техники. Важнейшими из этих сфер применения являются: 1) установки автоматического управления и регулирования в промышленности, энергетике и специальной технике; 2) устройства проводной связи и радиосвязи, радиолокационные станции, телевизионные системы; 3) счетно-решающие приборы и устройства; 4) гироскопические приборы; 5) навигационные приборы и системы управления на самолетах, морских и речных судах, беспилотных летательных аппаратах; 6) механизмы дистанционного управления; 7) самопишущие приборы, электрические часы, звуковое кино; 8) маломощный электропривод в различных отраслях промышленности (часовой, текстильной, швейной и т. д.); 9) кассовые аппараты и другое оборудование в торговле; 10) вентиляторы, электроинструмент и другие мелкие электромеханизмы в строительстве, сельском хозяйстве и т. п.; И) источники электроснабжения и привод в автомобилях, трактирах, вертолетах; 12) промышленные роботы; 13) бытовая техника: холодильники, стиральные машины, полотеры, пылесосы, швейные машины, миксеры, магнитофоны, элек-тро^итвы и т. д. Требования к характеристикам электрических машин малой мощности в указанных областях весьма различны. Так, например, для привода часовых механизмов применяются двигатели с частотой вращения, составляющей доли оборота в минуту, а для шлифовального инструмента в часовой промышленности - двигатели с частотой вращения 30-40 тыс. об/мин. Точность преобразования угловой и^фopмaции вращающимися трансформаторами и сельси- нами в современных навигационных системах должна составлять несколько угловых секунд, а в системах дистанционного управления рулями 1-2°. Стабильность частоты вращения двигателей в устройствах видеозаписи составляет тысячные доли процента и может меняться в широких пределах для других электроприводов. Время работы машины в некоторых бортовых системах ракет исчисляется минутами, а в навигационных приборах морских судов - десятками Синкронные Бесконтактные постоянного тока Наллекторные CyScuHxpoHHbie Реактивные С постоянными магнитами
Г истерезисные С электромагнитным возбуждением Универсальные Рис. В-1. Классификация электродвигателей малой мощности общего применения тысяч часов. Момент, развиваемый двигателями, составляет сотые доли ньютон-метра для управления контактами или сверхминиатюрными гироскопами и несколько ньютон-метров для привода механизмов промышленных роботов. Вследствие этого образовалась большая номенклатура электрических машин малой мощности; общее число различных типов машин исчисляется сотнями, а микроэлектромашиностроение превратилось в специальную отрасль, которая по темпам развития опережает другие отрасли электротехники. По своему назначению и особенностям работы электрические машины малой мощности можно разделить на четыре группы: 1) машины малой мощности общего применения; 2) микромашины автоматических устройств; . 3) микромашины гироприборов; 4) преобразователи. В первую группу входят различного типа двигатели: асинхронные, синхронные, коллекторные, бесконтактные постоянного тока, предназначенные в основном для индивидуального привода механизмов. На рис. В-1 приведена классификация электрических двигателей малой мощности общего применения, используемых в электроприводах общепромышленного и бытового назначения. Вторая группа электрических микромашин более разнообразна по номенклатуре и насчитывает сотни машин различных типов. Особенность микромашин этой группы состоит в том, что к характеристикам машин и их конструкции предъявляют специфические требования, определяемые условиями работы машцн в автоматических системах. Главными являются требования высокой точности работы, быстродействия, надежности и стабильности характеристик. Для ряда электрических микромашин этой группы такие показатели их работы, как КПД, cos ф, полезная мощность, весьма важные для электрических машин общего применения, оказываются несущественными. iiiiK В зависимости от назначения электрические микромашины автоматических устройств разделяют на две подгруппы: 1. Электрические микромашины, выполняющие силовые функции. Это индикаторные сельсины-датчики и сельсины-приемники, моментные двигатели, исполнительные двигатели. Машины этого типа преобразуют электрическую энергию в механическую и должны при достаточной точности преобразования иметь высокие энергетические показатели, например большой момент на 1 Вт потребляемой мощности. 2. Информационные электрические микромашины, преобразующие механические величины (угол поворота,.угловую скорость и ускорение) в электрический сигнал. К ним относят вращающиеся трансформаторы, трансформаторные сельсины, индуктосины, та-хогенераторы, преобразователи угла и угловой скорости в цифровой код и т. п. Основное требование, предъявляемое к этой группе машин,- малая погрш1ность преобразования, которая для значительного числа машин находится в пределах 0,02-0,1 %. Энергетические показатели имеют второстепенное значение. На рис. В-2 приведена классификация электрических микромашин автоматических устройств. В третью группу - электрических микромашин гироскопических приборов - входят различного типа гироскопические двигатели, датчики угла и датчики момента. В отличие от двигателей общего применения гироскопические двигатели имеют обращенную конструкцию (с целью увеличения кинетического момента) и должны быть весьма стабильны в работе. Электромашинные даэтики момента и угла, как правило, не заключены в отдельный корпус, а встроены в тот или иной узел гироскопического прибора; к ним предъявляют очень высокие требования по точности работы. Четвертая группа машин малой мощности охватывает различного рода электромашинные преобразователи напряжения, тока и частоты; они выполнены обычно в виде агрегатов, имеющих в одном корпусе двигатель и генератор. Большой класс машин этой группы составляют электромашинные усилители. По роду тока электрические машины разделяют на машины постоянного и переменного тока. Среди электрических микромашин автоматики широкое распространение получили машины перемен-
Силовые (энергетические) Индикаторные сельсины Моментные двигатели Исполнительные двигатели I- Асинхронные I Постоянного Шаговые Рис. В-2. Классификация электрических микромашин автоматики ного тока, и в том числе вращающиеся (поворотные) трансформаторы; сельсины, работакщие как в индикаторном, так и в трансформаторном режиме; асинхронные тахогенераторы для выполнения счетно-решающих функций и демпфирования; двухфазные асинхронные управляемые двигатели с короткозамкнутым ротором. Машины указанных типов работают на промышленной частоте 50 Гц и повышенных частотах 400, 500 и 1000 Гц. В малогабаритном исполнении наиболее часто применяют машины на 400 и 1000 Гц. Щ Электрические микромашины постоянного тока используются в основном как исполнительные двигатели и тахогенераторы. За последние годы в связи с улучшением характеристик полупроводниковых приборов расширяется область применения бесконтактных двигателей постоянного тока, в которых функцию коллектора выполняет электронный коммутатор. В-2. Величины, характеризующие электрические машины малой мощности Электрические машины малой мощности, используемые в автоматических системах, характеризуются рядом величин, которые определяют условия применения машины и возможность выполнения ею тех или иных функций. Эти величины можно разделить на две группы: общие - для различных по назначению и принципу работы машин и специфические - для машин данного конкретного типа. Перечень величин первой группы приведен в ГОСТ 183-74 ( Машины электрические. Общие технические требования ) и включает в себя номинальные значения напряжения и частоты, потребляемого тока и мощности, КПД, cos ф, номинальнойлолезной мощности (для двигателей), скорости ротора, допустимое превышение температуры, уровень шума, прочность и сопротивление электрической изоляции и т. д. Рекомендуемые значения указанных величин для различных типов электрических машин приведены в соответствующих ГОСТ. Величины второй группы определяются назначением машины и включают в себя входные и выходные сопротивления обмоток, выходные величины и диапазоны их изменения, погрешности воспроизведения заданных математических зависимостей (для счетно-решающих машин), моменты трения на валу и т. д. Имеется существенное различие в требованиях к выходным величинам для электрических машин автоматических устройств информационной и силовой подгрупп. Для электрических микромашин силовой подгруппы одной из важнейших характеристик, определяющих их работу, является развиваемый машиной момент, приходящийся на один ватт потребляемой мощности, вследствие чего электромагнитные нагрузки в электрических машинах этого типа выбирают максимальными по условиям теплового режима. Электрические машины силовой подгруппы должны иметь малые остаточные электромагнитные моменты и моменты трения в подшипниках и токосъемном устройстве; с этой целью необходимо предусматривать определенную структуру воздушного зазора, а также скос пазов, электрическую и магнитную симметрию магнитопрово-дов и обмоток, прецизионные шарикоподшипники, минимальные размеры контактных колец и т. п. В электрических микромашинах, преобразующих угол поворота и скорость вращения в электрический сигнал, наиболее важной величиной является точность преобразования. На точность преобразования оказывают влияние различного рода погрешности, которые по своей физической природе можно разбить на четыре группы: а) погрешности, вытекающие из принципа работы; это, например, погрешности, обусловленные нелинейностью преобразования; б) погрешности от конструктивных ограничений электрической машины - несинусойдальности распределения обмотки, наличия пазов на статоре и роторе, нелинейности кривой намагничивания: в) технологические погрешности от неточности изготовления: магнитопроводов (асимметрия), деталей конструкции (эксцентриситет), обмоток (ошибка в числе витков и короткозамкнутые витки); г) погрешности от изменения температуры окружающей среды, напряжения и частоты сети. Для уменьшения погрешностей первых трех типов в информационных электрических микромашинах выбирают относительно небольшие электромагнитные нагрузки и увеличенный воздушный зазор, а также материалы с высокой магнитной проницаемостью. Для снижения температурных погрешностей используется тот или иной способ термостатирования или термокомпенсации. В-3. Методы теоретического исследования электрических микромашин переменного тока Теоретический анализ электрических микромашин переменного тока производится такими же методами, как и анализ крупных машин. Наибольшее распространение получили: теория вращающихся полей, метод симметричных составляющих и теория двух реакций. Во всех теориях величины, характеризующие магнитное поле, создаваемое обмотками (намагничивающая сила, индукция, потокосцепление), принимаются синусоидально распределенными по расточке машины. В теории вращающихся полей каждую из величин, пульсирующих с частотой сети, раскладывают на две, бегущие в противоположные стороны; в расчет вводят результирующие величины, создаваемые всеми обмотками и вращающиеся в прямом и обратном направлениях. В методе симметричных составляющих любая несимметричная система токов, намагничивающих сил (НС) и напряжений заменяется двумя симметричными системами (двухфазными или трехфазными в зависимости от числа фаз в машине), имеющими разное чередование фаз и образующими круговые поля, вращающиеся в противоположных направлениях. Это позволяет для каждой системы симметричных составляющих (прямой и обратной) использовать хорошо известные из общей теории электрических машин соотношения и схемы замещения. Метод симметричных составляющих удобен при исследовании несимметричных режимов неявно-полюсных машин; его применение встречает значительные трудности в машинах, имеющих магнитную асимметрию (явнополюсные машины, машины с постоянными магнитами, с насыщенной магнитной системой). В теории двух реакций каждая из указанных выше величин, представляя собой некоторый пространственный вектор, раскладывается на две составляющие по двум взаимно перпендикулярным осям (1и q. При расчетах рассматривается взаимодействие НС и магнитных потоков отдельно по каждой из осей. Основное преимущество теории двух реакций состоит в том, что она с успехом может применяться как для машин переменного тока, так и для машин постоянного тока, имеющих симметричную или несимметричную магнитную систему. Поэтому при изложении теории различных типов электрических микромаиТин автор предпочитает использовать теорию двух реакций. С физической точки зрения теория вращающихся полей в некоторых случаях более наглядна, чем теория двух реакций и метод симметричных составляющих, однако математические соотношения получаются более громоздкими. В отличие от крупных электрических машин для микромашин переменного тока меньшую роль играют переходные процессы. Это объясняется относительно большими активными сопротивлениями и меньшими индуктивностями. Теория переходных процессов электрических машин применяется при рассмотрении пусковых режимов некоторых типов двигателей (шаговых, постоянного тока, синхронных), а также при анализе работы электрических микромашин от импульсных источников напряжения. Для малых электрических машин отношение активных сопротивлений контуров и индуктивных сопротивлений рассеяния к индуктивному сопротивлению намагничивания значительно больше, чем для крупных машин, поэтому упрощения, возможные в теории крупных машин от пренебрежения первичными параметрами, здесь совершенно недопустимы. По указанной причине представление основных закономерностей в электрических микромашинах с помощью векторных диаграмм может дать в большинстве случаев только качественное суждение о работе машины. Для электрических микромашин более эффективными оказываются алгебраические методы исследования, в которых составляются уравнения ЭДС машины с последующим их решением относительно токов. Это позволяет получить основные характеристики машины в функции приложенных напряжений и ее параметров и, таким образом, наиболее рационально подойти к вопросам проектирования. Для электрических микромашин автоматики, особенно выполняющих сигнальные функции, фундаментальное значение имеет анализ их погрешностей. Наиболее простой путь при подобного рода исследованиях - детальное изучение структуры магнитного поля в воздушном зазоре и выяснение влияния различных факторов на отклонение поля от синусоидального. В-4. Некоторые общие свойства электрических машин Рассматривая устройство электрических машин, нетрудно установить, что они имеют много общего; это дает возможность при известных допущениях построить их общую теорию. В каждой электрической машине имеются статор и ротор, разделенные относительно малым воздушным зазором. У большинства электрических машин магнитопроводы статора и ротора имеют радиальную симметрию магнитных свойств, а их поверхности, обращенные к зазору, могут рассматриваться как гладкие цилиндриче- ские поверхности. Исключением являются двигатели постоянного тока, а также синхронные реактивные двигатели и явнополюсные сельсины, у которых один из магнитопроводов (обычно ротор) образует явно выраженные полюсы (рис. В-3). В магнитопроводах статора и ротора имеются пазы, в которые уложены по тому или иному закону обмотки. Закон распределения и тип обмотки в большинстве электрических машин выбираются таким образом, чтобы взаимная индуктивность обмоток статора и ротора изменялась по синусоидальному закону в зависимости от 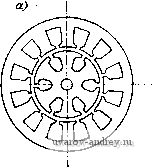 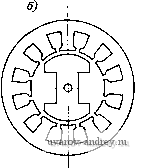 Рис. В-3. Магнитная система электрических'машин: а - не-явнополюсной; б - явнополюсной угла поворота ротора. Естественно, что это можно выполнить только с некоторым приближением; практически зависимость взаимной индуктивности обмоток от угла поворота ротора является некоторой периодической функцией, которая при разложении в гармонический ряд содержит кроме основной и высшие гармоники. Электромагнитные процессы в электрических машинах определяются магнитными полями в воздушном зазоре, создаваемыми токами, текущими вдоль оси машины. Токи в лобовых частях обмоток имеют значительно меньшее влияние и образуют магнитные потоки рассеяния. Распределение токов по воздушному зазору машины, а также изменение их во времени в конечном счете определяют тип электрической машины и все ее характеристики. Распределение токов, в свою очередь, зависит от типа обмотки, а изменение их во времени - от характера подводимого к обмоткам напряжения. Подавляющее большинство существующих обмоток может быть сведено к следующим четырем типам: а) к катушечной обмотке, как правило, на явно выраженных полюсах; б) многофазной распределенной обмотке; в) короткозамкнутой симметричной обмотке ( беличья клетка , полый немагнитный ротор, омедненный ферромагнитный цилиндр и т. п.); г) обмотке якоря коллекторных машин (коллекторная обмотка). В табл. В-1 приведена классификация различных типов электрических машин малой мощности в зависимости от вида обмотки и под- 3 а а о а. с е-О г о о н о S о S U S 3 о S as о в ta S к s a: о <u a-s a. ж к к о с ( 111 a. о 3 a. о с § к a. >. S о S s к s HI 3 к о. о. s g a s g g о .2 о к S S s О a g § я 2 s 2 m s Й 3 к о S § is о к e-O u O К ж cn 3- о m X с J3 X - m S ra о <и 3 о a о <u a) Я 3 я x О о a. о s a. S t- о JJ S X s m я s к H о о с о o a. S s Eh С1ч Д W о (U ш f- a. о m та о о та 1- a. 0 \o 1 о £M о я 0 Eh та £ s о >. JJ 3 та S о a. 3 к л та о , s J СП s a.4 a. и qj a. о § ВОДИМОГО напряжения. При составлении таблицы для удобства принято, что статор явнополюсный, а поверхность магнитопровода ротора гладкая. Это допущение оправдывается тем, что электромагнитные процессы в машинах определяются только относительным перемещением и расположением обмоток. В многополюсных электрических машинах все электромагнитные процессы повторяются через каждую пару полюсов, поэтому при изложении теории идеализированных электрических машин достаточно рассмотреть двухполюсную электрическую машину. Для реальных электрических микромашин, имеющих магнитную 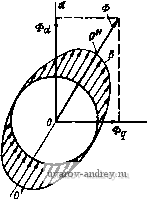
Рис. В-4. Распределение индукции магнитного поля в воздушном зазоре машины Рис. В-5. К определению ЭДС в катушке асимметрию, эксцентриситет, биения и т. п., электромагнитные процессы в многополюсных машинах несколько отличаются от процессов в двухполюсных; это в некоторых случаях оказывает существенное влияние на точность работы машины и рассмотрено ниже для отдельных типов машин. В электрических машинах различают основной магнитный поток Ф и магнитный поток рассеяния Oj. Основной магнитный поток создается токами во всех обмотках, т. е. результирующей намагничивающей силой машины. Он замыкается через воздушный зазор и может сцепляться с любой обмоткой. Основной магнитный поток является важнейшей величиной, характеризующей машину; от его значения зависят такие величины, как передаваемая электромагнитная мощность и моменты (для силовых микромашин), точность преобразования и воспроизведения математических зависимостей (для информационных и счетно-решающих электрических микромашин). Для идеализированной электрической машины принимается, что основной магнитный поток, а точнее, создающая его магнитная индукция имеет синусоидальное распределение по расточке (рис. В-4). Линия О'О , соединяющая точки максимальной индукции, называется осью магнитного потока. Магнитные потоки в обмотках электрических машин индуцируют ЭДС, которая содержит две составляющие: трансформаторную, обусловленную собственным изменением магнитного потока во времени, и ЭДС вращения от собственного перемещения обмотки относительно магнитного потока. Рассмотрим эти ЭДС на примере катушки, расположенной на роторе и вращающейся относительно синусоидально распределенного магнитного потока (рис. В-5) с угловой скоростью ©р = da/dt. Потокосцеплеиие катушки ¥ = Фщ® cos а = = COS а, а ЭДС в катушке
= - COS а - +¥ma)psina. Рис. В-6. Схема, поясняющая расчет трансформаторной ЭДС и ЭДС вращения Здесь первое слагаемое представляет собой трансформаторную ЭДС, а второе - ЭДС вращения. Обе величины зависят от угла между осями магнитного потока и катушки. При совпадении осей (а = 0) индуцируется только трансформаторная ЭДС; при а = 90° (оси перпендикулярны) - только ЭДС вращения. Так, например, для машины, имеющей две составляющие магнитного потока Ф<г и и две одинаковые, взаимно перпендикулярные обмотки на роторе (рис. В-6), получим ЭДС в продольном контуре ротора ЭДС в поперечном контуре ротора + ,С0р; Намагничивающая сила электрических машин, так же как и индукция магнитного поля, имеет синусоидальное распределение. Амплитуда НС находится по формуле где L - контур, проходящий через точки с максимальной индукцией; Нт - амплитуда напряженности магнитного поля. НС представляют в виде суммы Fm = 6 + Fa, где F - НС воздушного зазора; jFct - НС участков, содержащих сталь. ЧАСТЬ ПЕРВАЯ ОБЩИЕ ВОПРОСЫ ТЕОРИИ ДВУХФАЗНЫХ МАШИН ОСНОВЫ ТЕОРИИ ДВУХ РЕАКЦИЙ 1-1. Физическая модель обобщенной электрической машины Наличие общих закономерностей в электрических машинах, рассмотренных в § В-4, позволило построить простую и удобную для анализа физическую модель некоторой обобщенной электрической машины. Применительно к электрическим машинам малой мощности в качестве такой модели достаточно принять четырех-обмоточную электрическую машину, имеющую по две взаимно перпендикулярные обмотки на статоре и роторе. При этом будем полагать, что явнополюсность магнитопровода может быть только на статоре. Это не налагает никаких ограничений на исследование машин с явнополюсным ротором и симметричным неявнополюсным статором, которое можно выполнить на этой модели, если рассматривать электромагнитные процессы в машине в системе координат, связанной с ротором. Сформулируем основные допущения, принимаемые при построении физической модели четырехобмоточной обобщенной электрической машины. 1. Обмотки статора представлены в виде двух взаимно перпендикулярных катушек, одна из которых расположена по оси полюса; в общем случае они имеют различные значения параметров (активное сопротивление, индуктивность и емкость), что позволяет учесть электрическую и магнитную асимметрию, характерную для некоторых типов электрических микромашин. Обмотку, ось которой совпадает с осью полюса, назовем продольной и обозначим D; перпендикулярную ей обмотку назовем поперечной и обозначим Q (рис. 1-1). 2. Ротор машины имеет симметричную обмотку типа коллекторной обмотки, короткозамкнутой обмотки в виде беличьей клетки или полого немагнитного стакана, двухфазной или трехфазной симметричной обмотки. В коллелсторных машинах ток в обмотке подводится через щетки, которые могут располагаться по оси полюсов или перпендикулярной к ней ОСИ: Для этих машин ротор можно заменить двумя взаимно перпендикулярными обмотками, расположенными вдоль линий, соединяющих щетки (рис. 1-2). В машинах с фазным или короткозамкнутым ротором полагаем, что НС имеет синусоидальное распределение по расточке и может быть представлена вектором тока, направленным по оси НС, создаваемой током обмотки (рис. 1-3). С течением времени вектор тока меняется по модулю и направлению. Проекции этого вектора тока (НС) на оси d я q можно рассматривать как токи в некоторых взаимно перпендику- 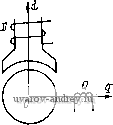  Рис. 1-1. Модель обобщенной электрической машины Рис. 1-2. Электрическая схема ротора коллекторного двигателя лярных обмотках ротора, неподвижных по отношению к статору и подводимых к ротору через воображаемые щетки. Таким образом, любую симметричную обмотку ротора заменяем двумя взаимно перпендикулярными обмотками с одинаковыми па-   Рис. 1-3. Представление симметричного ротора (а) в виде двух взаимно перпендикулярных обмоток (б) раметрами (активное сопротивление и индуктивность рассеяния). При этом в роторе коллекторной машины токи id и г, имеют реальное физическое существование, а в машине с фазным или коротко-замкнутым ротором токи id и - проекции результирующего вектора тока (НС). 3. Магнитные потоки и НС, создаваемые обмотками статора и ротора, принимаем синусоидально распределенными. Для обмоток, имеющих несинусоидальную НС, а также для явнополюсных 18 машин учитываем первую пространственную гармонику магнитного поля; магнитные потоки от высших пространственных гармоник поля относим к потокам рассеяния. 4. Параметры обмоток принимаем постоянными, а потери на гистерезис и вихревые токи в магнитопроводе - равными нулю. Учет насыщения может быть в некоторых случаях выполнен выбором соответствующей взаимной индуктивности. 5. Приложенные к обмоткам машины напряжения являются постоянными величинами (машины постоянного тока и синхронные машины) или синусоидальными функциями времени (асинхронные машины, вращающиеся трансформаторы, сельсины и т. п.). В последнем случае они изображаются комплексными временными векторами. 6. Все параметры обмоток приведены к обмотке статора, совпадающей с продольной осью машины. 7. Обобщенная машина принимается двухполюсной. Многополюсные машины обычно приводятся к двухполюсным путем соответствующего расчета параметров и синхронной скорости вращения поля (для машин переменного тока). С учетом сделанных допущений электрическая схема обобщенной электри^еской машины имеет вид, изображенный на рис. 1-4. Все величины (параметры, токи, потокосцеп-ления и т. п.), относящиеся к обмотке статора, расположенной по продольной оси, имеют индекс D; поперечной оси - индекс Q; для обмоток ротора по продольной и поперечной осям используем индексы d и q. Выражения для потокосцеплений обмоток обобщенной машины имеют вид: 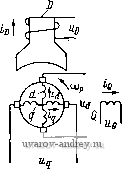 Рис. 1-4. Электрическая схема обобщенной электрической машины 4a = LotD + Adid; d = bdtd + Mdta; 4, = V, + M,tQ. (1-1) Здесь Lo, Ln, L, - индуктивности соответствующих обмоток; Мd и - взаимные индуктивности обмоток статора и ротора по осям d и q; Тд, Tq, и to, iq, id, iq - мгновенные значения потокосцеплений и токов обмоток машины. Систему равенства (1-1) можно записать в матричном виде: где W, i - четырехмерные векторы потокосцепления и тока; L - матрица индуктивностей обобщенной машины; (1-2) У некоторых типов машийг оси обмоток статора не совпадают с осями d я q (например, двигатель с экранированным полюсом). Выведем выражения для индуктивностей и взаимных индуктивностей обмоток т и и, оси которых смещены на углы 9 и 9 от оси d (рис. 1-5). Пусть по обмотке и протекает ток 1 А; тогда составляющие НС обмотки и, магнитного потока, созда- 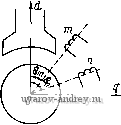 Рис. 1-5. Схема электрической машины с произвольно расположенными обмотками статора ваемого обмоткой п, и потокосцепления обмотки т можно записать в виде: По оси d По оси q F . . . эф cos 0 Ф . . . kWn эф cos 9 dffirt эфШт эф COS 9 cos Qm ffi эфsш9 qWn эф sin 9 gWn эфт эф sin 9 sin Вт Здесь гепэф, te эф - эффективные числа витков обмоток п и т; Ха и - магнитные проводимости по осям dug. Отсюда находим выражение для взаимной индуктивности обмоток пят Mnm=Md COS в„ COS е„ + sin е„ sin 0 , (1 -3) где Md = hWmsWns; = Я^аУтэфйУпэф. Коэффициенты и имеют простой физический смысл: - взаимная индуктивность обмоток тип, когда они расположены по оси d (в„ = = 9 = 0); - взаимная индуктивность обмоток тип при расположении их по оси q (в„ = в„ = я/2). Полагая, что оси обмоток тип совпадают, т. е. 6 = 6 , получим выражение для индуктивности Ln = Ls + Ma cos 0 + М^ sin е„ = U cos 0 + L,Sin %; (1-4) здесь Ld = Md + Ls, Lg = + Ls - самоиндуктивность обмотки по осям d и q\ Ls - индуктивность рассеяния. 1-2. Уравнения ЭДС и момента в осях d н q Положим, что по обмотке статора D протекает ток i, создающий продольный магнитный поток в положительном направлении оси d, и ротор вращается против часовой стрелки. Найдем ЭДС, индуцируемые этим током (рис. 1-6).  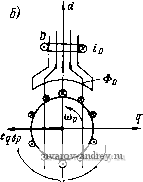 Рис. 1-6. Трансформаторная ЭДС (а) и ЭДС вращения (б)\ В обмотках Dud индуцируются трансформаторные ЭДС, которые по закону электромагнитной индукции равны где р = d/dt - оператор дифференцирования. В обмотке ротора q индуцируется ЭДС вращения, пропорциональная продольному потокосцеплению от тока ip и угловой скорости ротора со р. ЭДС вращения положительна, если создаваемая ею НС совпадает с положительным направлением оси q: е,вр= - MrfioWp. Аналогичные выражения можно получить для ЭДС в обмотках машины от остальных токов. В обмотках D я Q индуцируется только трансформаторная ЭДС: ер - -LDpiD - Mipii; = -LqpiQ-Mgpig. Суммарная ЭДС в обмотках d я q содержит как трансформаторные ЭДС, так и ЭДС вращения: ed = -Ldpid-MdpiD + Lgigdip + MigOp; = - Igpig - Mgpio-Ldidv-Mdiop- приложенные к обмоткам машины напряжения равны сумме падений напряжений на активных сопротивлениях и противо-ЭДС: Ud = {r + Ldp) id + MapiD-Li(i)p~MiQ(i)p; = (r + Lgp) iq + MpiQ + Ldid4>p + Mdipdip. Эту систему уравнений можно записать в матричном виде u = Zi, (1-5) где матрицы напряжений и токов и полных сопротивлений, обобщенной машины имеют вид Го + LdP О MdP
<7 0 -MWp r + Ldp LdWp M,p r + L,p - Lgu)p (1-6) Нетрудно видеть, что матрица Z представляет собой сумму трех матриц: Z = R + Lp + Gap; (1-7) здесь R - матрица сопротивлений; L - матрица индуктивностей; G - так называемая матрица момента. Матрица сопротивлений jR содержит четыре сопротивления обмоток и является диагональной матрицей:
Матрица индуктивностей L (1-2) содержит все само- и взаимные индуктивности обмоток и является симметричной матрицей. Матрица G содержит взаимные индуктивности обмоток по продольной и поперечной осям, возникающие вследствие вращения ротора. Эти составляющие определяют электромагнитный момент машины, поэтому матрица G называется матрицей момента:
(1-8) Матрица G содержит те же коэффициенты само- и взаимные индуктивности, что и матрица L, только в машинах, имеющих синусоидальное распределение магнитного потока. При несинусоидальном распределении магнитного потока необходимо ввести Другие значения индуктивностей, определяющих ЭДС вращения. Уравнение для напряжений (1-5) запишем в виде u = i?i + p¥ + Ba)p, где вектор потокосцепления Loio + Moid (1-9) W = Li = Я обобщенный вектор индукции Я В =Gi = Lqiq + Mig Ldid + Mrfio Li + Miq -Miq Mdio + i-did Уравнение (1-9) является аналогом общеизвестного уравнения ЭДС для контура, движущегося в переменном внешнем магнитном поле, согласно которому приложенное к контуру напряжение равно падению напряжения в активном сопротивлении и сумме противо-ЭДС - трансформаторной (от изменения потокосцепления) и ЭДС вращения (от движения контура). Умножая обе части уравнения (1-9) на транспонированный вектор тока i, получим выражение для мощности Ги = Г;?1 + Гр¥ + ГВа)р. (1-10) Последний член правой части этого уравнения представляет собой механическую мощность машины Ям, зависящую от угловой скорости ротора. Отсюда электромагнитный момент, приложенный к ротору машины, Р = ГВ = Г01. (1-11) Приведенные выше уравнения позволяют проводить анализ как установившихся режимов (шр = const), так и переходных. В электрических машинах малой мощности часто ограничиваются рассмотрением установившихся режимов. Уравнения этих режимов получаются из (1-5), причем следует учитывать, что р = О, шр = = const, а токи и напряжения - постоянные величины в машинах постоянного тока и синхронных машинах (в координатах dug); р = (Op = const, а токи и напряжения - комплексные временные векторы для асинхронных машин, сельсинов, вращающихся трансформаторов, универсальных двигателей и т. п. Во втором случае матрицу сопротивлений запишем как сумму трех матриц ZR + jX + fnGv; . (1-12) здесь матрица индуктивных сопротивлений D Q d q О О <7 О О О О матрица сопротивлений для момента D Q dr О d О О О 0 = qixmd о и = й)р/й) -скорость ротора в долях синхронной скорости; х^, Xq, Xd, Хд - индуктивные сопротивления обмоток машины, соответственно обмоток D и Q, d я д; причем XD~Xmd-\-XDs, Xq - Xmq-\- Xqs, Xd ~ Xfnd ~b Xs, Xq = Д^щд ~Ь Xg, где Xds, Xqs, Xs - индуктивные сопротивления рассеяния обмоток, а Xmd и Xmq - сопротивления взаимной индукции. Матрицу сопротивлений можно записать в виде
(1-13) Матрицу Z (1-13) обобщенной машины переменного тока легко составить, пользуясь следующими правилами: а) по главной диагонали матрицы выписываем полные собственные сопротивления обмоток + jx, Tq + /xq, г + jXd, г + jx; б) в местах, расположенных симметрично относительно глав- ной диагонали, записываем сопротивления взаимной индукции контуров Dud ijxmd), а также Q я д (jxg), в) оставшиеся свободными места строк dug заполняем членами, соответствующими ЭДС вращения в контурах ротора; они имеют в качестве множителя относительную скорость и знак минус для контура d (плюс для контура д) при вращении ротора против часовой стрелки. Составляющими векторов тока и напряжения будут комплексные временные векторы
Формула для электромагнитного момента примет вид M = Re(/B) = Re(/G/), где звездочкой помечена комплексно-сопряженная величина. Подставляя сюда значения I и В, получим М= -Re( - X qldiQ - xJdiq + XmdIqiD + XdIqid)- (1-15) В частном случае неявнополюсной двухфазной машины с различными собственными параметрами обмоток статора Xmd ~ Xmq - Хт, Xd = Хд = X - Хт ~Ь Xs, d + iXo = Zo + jXm, Q + /-*Q = Q + lm- (K сопротивлениям и Zq могут быть отнесены и внешние сопротивления, например фазосдвигающего конденсатора.) Матрица Z примет вид
(1-16) Формула для момента (1-15) в скобках будет содержать только два слагаемых Л^=-Ке(/Л-/Л)- (1-17) 1 2 3 4 ... 18 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |